 介绍机器人焊接系统中的2种夹具设计与快换方式
介绍机器人焊接系统中的2种夹具设计与快换方式
便捷的夹具快换可大大提高焊接系统的设备利用率,使用户可以根据需求随时调整生产,减少重复性投资和设备闲置。同时,利用夹具快换功能,还可实现在新产品试制和小批量生产阶段先投夹具,在现有机器人焊接线上生产,批量生产阶段前再建新的焊接线。
整根夹具梁快换的设计和快换方式
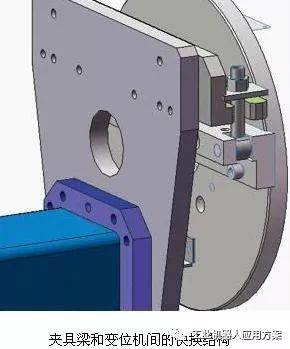
夹具梁和变位机间的快换连接:夹具两侧安装定位销,变位机法兰一侧采用定位销套,另一侧采用键槽的定位方式。连接时,夹具两侧的定位销依靠重力插入销套和键槽中定位,连接板两侧的翻转螺钉压紧连接板。这种快换结构简便可靠,定位重复性效果好,已经成为通用快换结构标准。
夹具重量通常为200~400kg,要想快捷省力地更换夹具,就需要使用辅助工装来升降和移动夹具。单梁夹具的辅助工装可以使用液压堆高叉车改造,在叉车上加装夹具梁锁紧结构防止夹具侧翻,或者在夹具梁上安装可快速拆换的叉车靴套。
小件夹具及部件快换的设计和快换方式
当单根夹具梁上夹具的互换性高时,可以使用标准快换式夹具梁。此时夹具梁上的定位销按标准尺寸分布,小件夹具可用其底板上的标准尺寸定位套与梁配合定位,使用开口快换垫圈快速夹紧。当夹具需要更换部件以适应不同型号的工件在同一套夹具上生产时,也可使用同样的结构。
小件夹具或快换的部件人工更换时重量要控制在20kg左右,否则需要专用辅助工装。部件更换时,气缸与阀间的气管可通过多路快换接头拆开,阀留在夹具梁上,供替换夹具重复使用。电控线缆连接采用多针航空插头断开。
应用上述快换结构,单套夹具更换时间可控制在10min内,可大大提高机器人焊接系统的整体生产效率。
-
机器人
+关注
关注
206文章
27033浏览量
201392 -
夹具
+关注
关注
0文章
76浏览量
13141
原文标题:机器人焊接系统中的夹具快换方式
文章出处:【微信号:jiqirenyingyong,微信公众号:jiqirenyingyong】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论