 生医应用的磁控胶囊机器人,实现多模态响应与多功能集成
生医应用的磁控胶囊机器人,实现多模态响应与多功能集成
胶囊机器人可以通过口服方式抵达胃肠道病灶区域实施医疗功能,为实现胃肠道疾病无痛无创诊疗和提高患者依从性提供了重要途径。其中,磁控胶囊机器人技术因其驱动方式具有非接触、穿透性能好和控制模式丰富等优势而被认为是最理想的胃肠道疾病诊疗手段之一。
然而,受制于有限的胶囊空间结构和复杂的胃肠道环境,在小型化和功能化应用需求下,磁控胶囊机器人本体结构设计及外部磁驱动策略开发等均面临巨大挑战。现有磁控胶囊机器人主要采用内置永磁体的赋磁设计模式,普遍存在体积大(尺寸大于#00号胶囊,8.53mm × 23.3mm)、载药比低以及医疗功能单一等问题,实际应用范围和疗效都受到极大限制。
近期,来自华中科技大学国家脉冲强磁场科学中心与电气与电子工程学院的李亮教授、曹全梁教授团队,提出一种新颖的微型磁控胶囊机器人(胶囊本体最小尺寸仅5.8mm × 13mm),通过创新胶囊机器人内部磁化结构与外部驱动策略,赋予了胶囊机器人主动靶向运输、定点采样、多重药物释放和磁电/热转化激励等功能,为胃肠道疾病无创诊疗提供了全新的解决方案。
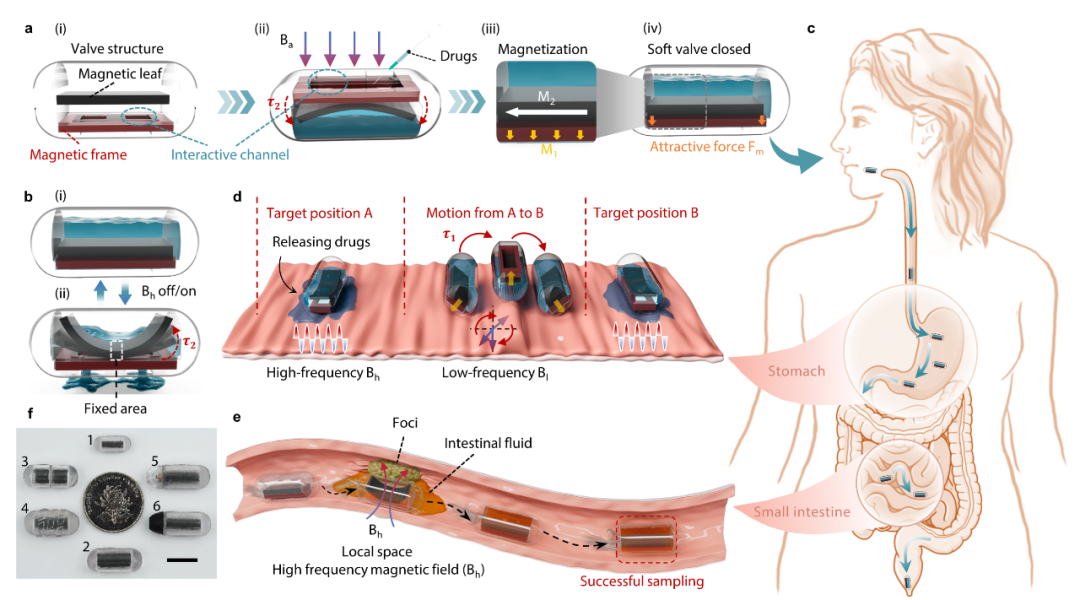
图1 磁控胶囊机器人的结构、磁性软体通道设计和医学功能示意图:(a)胶囊结构和组装过程;(b)通道开闭状态切换;(c)人体摄入胶囊示意图;(d)胃部多目标输运和药物释放示意图;(e)小肠内取样示意图。
图2 自然子刊-Nature Communications发表页面截图
2024年2月29日,这一研究成果以“Magnetically driven capsules with multimodal response and multifunctionality for biomedical applications”为题发表在《Nature Communications》期刊上。华中科技大学博士生孙宇轩、张望为共同第一作者,李亮教授和曹全梁教授为共同通讯作者,其他主要合作者还包括,华中科技大学计算机科学与技术学院宋恩民教授、华中科技大学同济医学院附属协和医院蔡开琳教授、华中科技大学生命科学与技术学院邱武教授,以及华中科技大学电气与电子工程学院韩小涛教授、吕以亮副研究员、欧阳少威博士后等人。
▍机器人结构设计
与现有普遍采用的内置永磁体赋磁设计模式不同,该研究团队提出了一项颇具远见的创新设计理念,即将磁控软体机器人技术引入胶囊机器人本体结构设计中,这一构想为破解受限胶囊空间内部件集成难题、实现胶囊机器人的微型化和多功能化提供了全新思路。
在该研究中,团队开发出一种由可变形的磁阀门和固定式的磁锁组成的双层磁性软体通道,其磁化模式分别为轴向磁化(磁锁)和径向对称磁化(磁阀门),并完成了通道密闭性及状态调控性能测试(图3)。这种独特的磁化模式使得在无外加磁场情况下,磁性软体通道因磁阀门与磁锁之间的梯度磁场力而自动闭合,确保了胶囊的高密封性。
当施加外部磁场时,磁阀门能够在磁力矩的作用下产生向上的“U形”变形,从而打开通道实现胶囊内外物质的交换。这一特性确保了所开发胶囊机器人能够通过外部磁场的激活来实现与胃肠道环境的精准可控交互,且其类似于内开窗的打开模式有效避免复杂胃肠道环境对磁性阀门变形造成的不确定影响,从而保持通道功能的稳定性和可靠性。
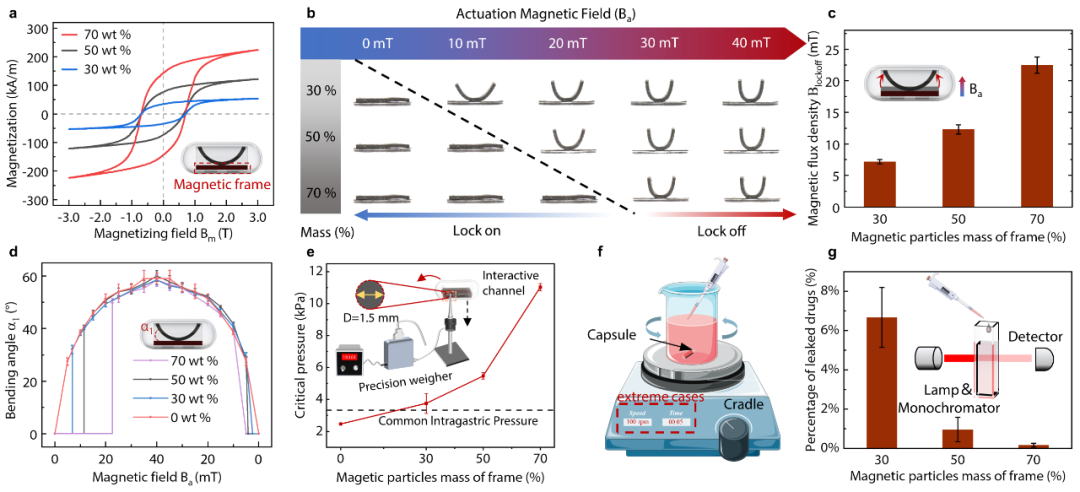
图3 磁控胶囊机器人通道开闭的灵活调控和密闭性测试:(a)磁滞回线测量结果;(b)不同磁场下磁阀门的变形特征;(c)通道开启磁场测量;(d)磁阀门弯曲角测量;(e)通道临界压强测试;(f)密闭性测试示意图;(g)密闭性测试结果。
与传统磁阀门依赖外部梯度磁场力的关闭/开启机制不同,该团队开发了基于内部梯度磁场力和外部磁力矩竞争式开闭状态调控方法,实现了无外加磁场下的胶囊通道自闭合,且开启与外部磁场梯度无关,这一点在远距离控制中具有更为明显的优势,因为磁场梯度会随着距离的增加而迅速衰减。
▍机器人驱动策略与动态行为
在所开发的磁控胶囊机器人功能实现中,整体结构与局部通道的磁响应扮演了关键角色。然而,由于它们共享相同的内部磁化特性和外部磁场,如何独立且灵活地调节这两种响应极具挑战。
在该项研究中,通过磁性软体通道的单向净剩磁设计以及频率响应差异化设计,开发了整体与局部磁动力学响应的解耦调控策略,实现了机器人在低频磁场下整体运动和高频磁场下局部变形的独立控制。
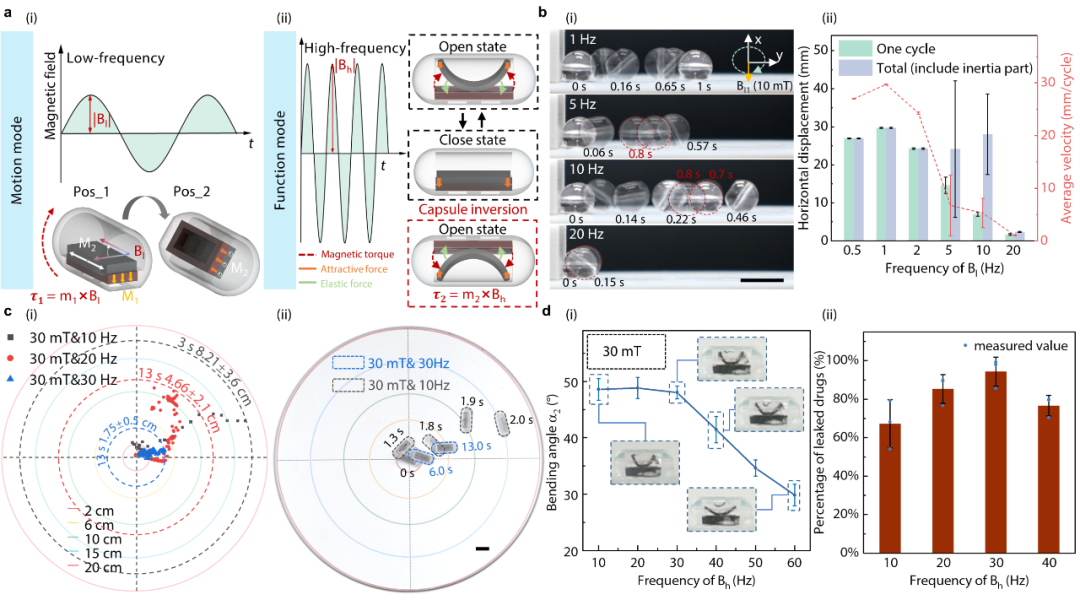
图4 胶囊机器人的整体-局部磁动力学分析:(a)不同驱动磁场下运动模式示意图;(b)运动性能测试;(c)锚定性能测试;(d)局部变形和药物释放测试。
实验结果显示(图4),所开发胶囊机器人在低频磁场下(小于5 Hz)展现出优异的可控性和高效的运动表现。同时,该机器人在高频磁场下(大于30Hz)显示了出色的锚定性能,这有助于胶囊机器人在目标区域内实施精准、稳定的医疗功能。
以上功能的实现攻克了传统胶囊机器人运动及功能模式单一、拓展性差等瓶颈,为胶囊机器人的整体主动靶向输运和局部多模态磁响应提供了关键技术支持。
▍机器人功能拓展与模块化设计
在上述基础上,研究团队进一步对胶囊机器人结构和拓展功能进行了探索,实现胶囊机器人动能、光能、热能多能交互的无内源模块化设计与功能集成。这种创新设计不仅拓宽了胶囊机器人的应用范围,还显著提高了其在生物医学场景中的灵活性和可控性。
具体而言,研究团队巧妙地设计了胶囊的局部结构,并通过调控外加磁场频率,成功赋予了胶囊机器人四类拓展功能:多重药物释放、粘液清除、磁电和磁热转化激励(图5)。这些功能的实现显示出所开发胶囊机器人技术在多药物协同治疗、增强大分子类药物吸收以及光/热辅助治疗等方面具有重要应用潜力。


图5拓展功能展示:多重药物释放与低频靶向运输-高频磁电转化激励
▍机器人功能验证与测试
在对胶囊机器人进行功能评估的实验研究中,团队先后通过理想模型实验、动物体外器官模型实验、动物体内实验对胶囊机器人靶向运动、定点可控/多重药物释放与采样等医学功能进行了系列评估,验证了其在胃肠道疾病诊疗中的应用潜力(图6)。
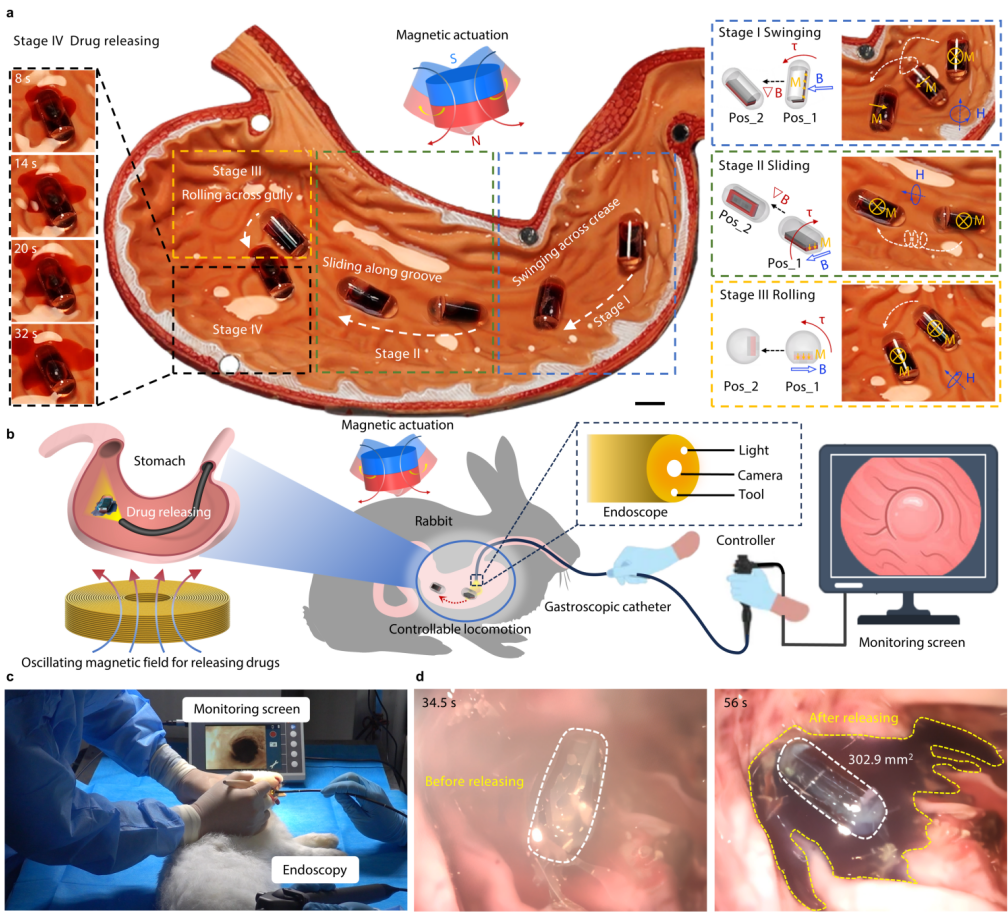
图6 胶囊机器人功能评估:(a)胃模型中靶向输运与药物释放;(b)活体动物实验验证的系统示意图;(c)实验现场图像;(d)药物释放前后对比结果。
综上所述,华中科技大学李亮教授和曹全梁教授团队攻克了受限胶囊空间内的多功能部件集成、复杂胃肠道环境中的多模态磁响应调控等难题,实现了磁控胶囊机器人的小型化和功能化,已在主动靶向运输、可控药物释放和采样等方面展现出突出的技术优势和应用潜力,相关研究成果对于推动磁控胶囊机器人技术发展和临床应用具有重要意义。
参考文章:
https://www.nature.com/articles/s41467-024-46046-9
审核编辑:刘清
-
永磁体
+关注
关注
0文章
99浏览量
5310 -
胶囊机器人
+关注
关注
0文章
2浏览量
927
原文标题:生医应用的磁控胶囊机器人,实现多模态响应与多功能集成
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论