 基于LPC2210微控制器实现机器人人机交互系统的设计
基于LPC2210微控制器实现机器人人机交互系统的设计
移动机器人人机界面为移动机器人的运动控制提供直观的路径图形、运动速度和角度、障碍物信息等。通过ARM2210的串口UART0接收中心处理器PC104的运动信息,利用东芝公司的液晶控制器T6963C驱动STN液晶屏YL240128A,以及ZLG/GUI软件包提供的基本绘图和菜单操作函数设计了基于嵌入式系统ARM2210开发板的移动机器人人机界面,并利用ARM2210的I2C器件ZLG7290提供的I2C接口功能和键盘中断信号实现菜单选择,具有很强的实用性。
引言
嵌入式系统以其高性能、低功耗、低成本的优点,已经在很大程度上改变了人们的生活。如,MP3播放器、智能手机、数码相机产品等已经渗入人们生活的各个方面。随着液晶显示技术的不断进步,以及图形用户界面GUI (Graphical User Interface)技术的广泛应用,人机界面也越来越友好。它能为移动机器人的运动控制提供直观的路径图形、数据参数等。本文介绍了一种以嵌入式微处理器LPC2210为基础,应用ZLG/GUI软件包设计移动机器人人机界面的方法。
我们设计开发的智能移动机器人是一个以PC104嵌入式微机为中心处理器,TMS320F2812为运动控制器,超声波传感器作为避障的集合环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,主要包括运动系统、电子信息系统和传感系统。它通过CCD摄像机和图像采集卡获得视频信息,并通过超声波传感器组测得前方障碍物距离实现避障。移动机器人的人机界面主要向用户展示移动机器人的运动信息,如当前的运动速度、与前方障碍物的距离以及行驶的轨迹。
2 ARM221O的基本组成
ARM221O以PHILIPS公司ARM7TDMI-S微控制器LPC2210为核心,以支持实时仿真和嵌入式跟踪的嵌入式系统。LPC2210的CPU频率最大为60MHz,并且扩展了丰富的外围设备接口,使系统稳定性大大提高,开发也更简单。图1是ARM2210的系统框图。
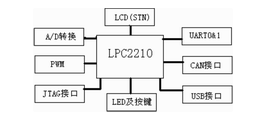
图1 ARM2210的系统框图
由于系统包含了RS232转换电路,可通过UART0与上位机PC104进行数据传输,同时还包括东芝公司的点阵式液晶控制器T6963C,扩展了液晶接口,同时提供了LED数码管显示和16个按键输入,因此开发人机界面非常方便。
3 人机界面的硬件设计
3.1 数据传输
PC104的串行口可以作为标准PC的COMl通信口或扩展为控制台串行口,用于键盘输入和显示终端输出或计算机之间的串行输入/输出口。
ARM2210的UART0具有16字节接收和发送FIFO;寄存器位置符合'550工业标准;接收器FIFO触发点可为1, 4, 8和14字节 ;内置波特率发生器。
移动机器人的运动信息通过TI公司DSP控制器TMS320F2812以及超声波传感器等传送至嵌入式微机PC104,再经过PC104作信息融合后,通过串口传给ARM2210并由液晶屏显示。
3.2 液晶显示及菜单选择
东芝公司的液晶控制器T6963C具有独特的硬件初始化设置功能,最大驱动点阵液晶为单色640*128(单屏),支持图形和文本单独显示和混合显示,并具有字符发生器,能满足对移动机器人人机界面的显示要求。图2为内置T6963C的240*128点阵图形液晶模块原理图。
另外, ARM2210系统中配备了I2C器件ZLG7290以及16个按键。ZLG7290提供了I2C串行接口和按键中断信号,方便与处理器连接;并且能驱动8位共阴数码管或64只独立的LED和64个按键,8个功能键可检测任一键的连击次数。
本系统选用点像素为240*128点、黄绿显示的STN液晶屏YL240128A作为人机界面显示屏;用ARM2210系统16个按键中的S11、S12、S13作为输入部分,实现对人机界面的选择操作。
4 人机界面的软件设计
移动机器人人机界面的关键是菜单操作,以及图形和数据的实时显示。GUI是用于提高人机交互友好性、易操作性的计算机程序,它是建立在计算机图形学基础上的产物。人们不再需要死记硬背大量的命令,而是通过窗口、菜单方便地进行操作。由于嵌入式系统的资源有限,所以对GUI 的要求是可裁剪的,高速度的。ZLG/GUI 是由周立功公司开发的,占用资源小、使用方便的嵌入式系统简易的图形用户界面软件。ZLG/GUI 提供了最基本的画点、线、圆形、圆弧、椭圆形、矩形、正方形、填充等功能,较高级的接口功能有ASCII 显示、汉字显示、图标显示、窗口、菜单等,支持单色、灰度、伪彩、真彩等图形显示设备。因此,利用ZLG/GUI软件包能够满足对移动机器人人机界面的设计要求。
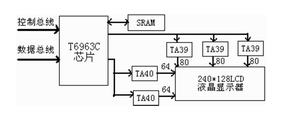
图2 内置T6963C的240*128点阵液晶模块原理图
4.1 数据传输
接收上位机PC104发送的数据时,使能UART0的FIFO进行数据发送/接收,接收采用中断处理方式。其中,UART0的串口模式和数据结构设置为:通信波特率9600,8位数据位,1位停止位,无奇偶校验。其主要程序如下:
/*定义串口模式及数据结构*/
typedef struct Uart0Mode
{ uint8 datb; // 字长度
uint8 stpb; // 停止位
uint8 parity; // 奇偶校验位
} UART0MODE;
/*初始化串口*/
uart0_set.datb= 8; // 8位数据位
uart0_set.stpb = 1; // 1位停止位
uart0_set.parity = 0; // 无奇偶校验UART0_Ini(9600, uart0_set); // 初始化串口模式
/*串口UART0接收中断*/
void __irq IRQ_UART0(void)
{ uint8 i;
if( 0x04==(U0IIR&0x0F) ) rcv_new = 1; // 置新数据标志
for(i=0; i<8; i++)
{ rcv_buf = U0RBR; // 读FIFO数据,清除中断标志}
VICVectAddr = 0x00; // 中断处理结束
}
4.2 窗口显示
人机界面主要是通过图标菜单实现移动机器人运动参数的显示,以及运动轨迹的相关操作,如"打开"、"暂停"、"关闭"等。因此,首先定义一个窗口的数据结构,并设置窗口的起始坐标、大小、标题等相关参数;然后调用GUI_WindowsDraw()输出显示窗口
/* 设置主窗口并显示输出 */
mainwindows.x = 0;
mainwindows.y = 0;
mainwindows.with = 240;
mainwindows.hight = 128;
mainwindows.title = (uint8 *) "Mobile Robot Interface";
mainwindows.state = NULL;
GUI_WindowsDraw(&mainwindows); // 绘制主窗口
图标菜单也需要定义相关的数据结构,其中图标数据和文字显示可以通过字模软件转化为数据。如对应"打开"图标转化为数据:
uint8 const menuico1[]={
0x00,0x70,0x00,0x1C,0x00,0x12,0x1C,0x1A,
0x17,0x0A,0x21,0xF1,0x20,0x1A,0x4F,0xFE,
0x58,0x02,0x50,0x02,0x60,0x06,0x60,0x04,
0x60,0x04,0x40,0x08,0x7F,0xF8,0x00,0x00,
}; /*;图标"打开";宽×高(像素) : 16×16*/
然后,将每一个图标菜单项的显示坐标地址、图标的数据指针、对应的服务函数等进行设置后,即可调用GUI_MenuIcoDraw()实现显示输出。
mainmenu[0].icodat = (uint8 *) menuico1;
mainmenu[0].title = (uint8 *) "open";
mainmenu[0].Function = (void(*)())Runopen;
另外,主程序需要先调用GUI_SetColor(1,0)函数来设置前景色及背景色。1表示点显示,0表示点灭。
4.3 图标菜单选择
界面中还需实现对图标菜单的选择操作。I2C器件ZLG7290提供了I2C接口功能和键盘中断信号。I2C总线是Philips推出的芯片间串行传输总线,它以2根连线实现了完善的全双工同步数据传送,可以方便的构成多机系统和外围器件扩展系统。I2C总线采用了器件地址的硬件设置方法,通过软件寻址完全避免了器件的片选线寻址方法,从而使硬件系统具有最简单而灵活的扩展方法。I2C操作模式分为主模式I2C和从模式I2C,分别对应LPC2210作为主机和从机。
本文采用主模式I2C发送接收数据,从而控制三个按键S11、S12、S13的扫描并检测其连击次数。程序中先设置好默认菜单,再调用函数ZLG7290_GetKey()读取被按下的键值。ZLG7290_GetKey()函数通过调用IRcvStr (ZLG7290,1,&rece,1),直接读取器件ZLG7290上的按键值。若S11被按下,表示指向上一个图标菜单;若S12被按下,表示选择当前的图标功能;若S13被按下,表示指向下一个图标菜单。
key = ZLG7290_GetKey();
if(key==KEY_OK) break; // 点击OK 键选择
if(key==KEY_NEXT)
{ mainmenu[select].state = 0; // 取消上一选择
GUI_MenuIcoDraw(&mainmenu [select]);
select++; // 指向下一菜单
if(select>2) select=0;
mainmenu[select].state = 1;
GUI_MenuIcoDraw(&mainmenu [select]);
}
if(key==KEY_BACK)
{ mainmenu[select].state = 0; // 取消上一选择
GUI_MenuIcoDraw(&mainmenu [select]);
if(select==0) select=2;
else select--; // 指向下一菜单
mainmenu[select].state = 1;
GUI_MenuIcoDraw(&mainmenu [select]);
4.4 移动机器人行使轨迹及相关参数显示
为了能实时更新显示数据及行使轨迹,PC104将移动机器人的速度,行驶方向,转角等信息转化为液晶屏上的坐标信息,并调用基本绘图函数GUI_Line(uint32 x0, uint32 y0, uint32 x1, uint32 y1, TCOLOR color),画出当前行驶轨迹;同时,将新的速度值及与前方障碍物的距离值更新到相应位置。
4.5 人机界面显示效果
图3为人机界面实现效果图,整个显示窗口大小为240*128;图标菜单大小为16*16,共有六个图标;用户可以根据自己需要添加图标及对应功能。移动机器人行驶轨迹显示窗口大小为160*100;其他运动参数显示窗口大小为80*100,可以显示当前的速度、障碍物的距离和机器人旋转角度。图中小车位置表示轨迹的起点,左下角有坐标显示和比例尺1:500。
图3 人机界面实现效果图
结语
随着嵌入式系统应用的飞速发展,人机交互系统的开发将更加广泛。本文阐述的基于ARM2210嵌入式系统的移动机器人人机界面的设计方法,这种方法设计简单,成本低,使操作者与机器人的交互更加友好。
责任编辑:gt
-
微控制器
+关注
关注
48文章
6809浏览量
147626 -
嵌入式
+关注
关注
4981文章
18281浏览量
288387 -
机器人
+关注
关注
206文章
27033浏览量
201383 -
PC104
+关注
关注
5文章
52浏览量
67162 -
LPC2210
+关注
关注
0文章
28浏览量
14203
发布评论请先 登录
相关推荐
LPC2210的紧凑型图像采集系统OV7620
【LeMaker Guitar申请】物流机器人人机交互
ARM处理器LPC2210在脑血氧监测仪中的应用
1632位微控制器LPC2210相关资料下载
基于LPC2210的LED显示屏控制系统该如何去设计?
LPC2210中文资料数据资料(使用指南)
实时操作系统μC/OS-II在LPC2210上的移植
μC/OS-II 在LPC2210上的移植实现
基于LPC2210的远程Modem管理系统
uCOSII在LPC2210上的移植详解
LPC2210使用指南

基于ARM7 LPC2210的触摸屏触摸点数据采集系统设计






 工商网监
工商网监
评论