 激光导航和视觉导航哪个更适合扫地机器人?
激光导航和视觉导航哪个更适合扫地机器人?
科技发展的今天,智能家居产品越来越受到人们的追捧,而扫地机器人作为其中的“网红担当”,却一直顶着人工“智障”的帽子,让人又爱又恨。
不少人使用后都吐槽本以为可以解放双手,没想到倒成了扫地机器人的24小时保镖,不是钻到犄角旮旯把自己卡死,就是像愣头青一样到处乱撞,让人实在爱不起来。
事实上,考验扫地机器人是智能还是“智障”,首先还要看扫地机器人能不能做好扫地本身这件事,而影响扫地机器人清扫效果的重要因素则是扫地机器人导航技术。
导航技术作为扫地机器人的“大脑”和“眼睛”,是扫地机器人实现智能化的前提,目前市面上应用较为广泛的主要有两种,激光导航和视觉导航。而人们又普遍认为激光导航要优于视觉导航,事实上真是如此吗?
激光导航VS视觉导航,谁更适合扫地机器人?
激光导航
激光导航是利用扫地机器人上的激光测距仪测量设备与周围物体的距离,然后通过算法计算出相应的位置,再根据测量出的数据扫描出一个完整的地图模型,最后扫地机器人根据地图进行导航作业。
激光导航起步更早,在理论、技术和产品落地上都相对成熟。在实际表现中,测距精准,误差模型简单,在绝多数环境下都能稳定运行。缺点是激光导航属于二维避障,效果较差,此外,激光传感器大多部署在顶端,导致增加机身高度,同时还可能对低矮障碍物存在探测盲区。
视觉导航
视觉导航通过视觉传感器可以获取海量的环境信息,拥有强大的场景辨识能力。这对搭载视觉导航技术的扫地机器人在重定位、场景分类、避障上等有着巨大的优势。
而同时视觉导航的弊端也同样突出,由于视觉感知数据量大,大量的环境信息会加剧数据处理单元的运行压力,在算法和硬件无法给予足够支持时,就会导致测距误差,精准度下降。
虽然两者各擅胜场,但从技术实现难度来看,视觉导航要更高于激光导航,因此,目前市面上扫地机器人还是激光方案占据大多数,但并不意味着视觉导航弱于激光导航。
视觉导航不止于一个“配角”,更是人工智能的集大成者
由于激光导航有着技术上的局限性,不少头部厂商都在尝试视觉导航,目前市场上已能见到激光导航+视觉传感器的融合方案的产品,如去年的明星产品石头T7pro、科沃斯T8AIVI都加入了视觉传感器,在识别、避障方面都有了显著的提升。
当然视觉导航的潜力绝不止于一个配角,虽然技术实现难度更高,但潜力更大,随着视觉技术的不断迭代,计算机视觉在导航方面取得了长足进步,如国内的公司INDEMIND针对扫地机器人研发的双目视觉导航模组方案。
据悉,该方案定位精度及建图精度<4cm,在进行封闭测试和实景测试中足以媲美激光雷达。同时,根据作业需求提供沿边清扫、弓形清扫、局部清扫等多种规划模式,完全可以胜任普通人的家居环境。
INDEMIND双目视觉导航方案扫地机器人样机避障演示1
不同于红外、雷达等方案(二维避障),INDEMIND双目视觉导航模组实现三维避障,能够通过三维扫描精准检测障碍物与设备自身之间的距离,同时避障信息实时传输,大幅提升了感知的可靠性。
不仅如此,在识别避障上更有着独有的优势,通过立体视觉技术,可以有效识别物体、人、宠物及环境信息,包括识别十几种大类,数百种高中低矮物体,如座椅、玩具、拖鞋、数据线、宠物便便等等,识别精度可达2cm。还可以根据不同障碍物信息采取不同的避障策略,如遇到电线、插线板、花盆等危险易碎品时,避障距离为5cm; 像拖鞋、座椅、垃圾桶等其它家庭常见障碍物,避障距离则为2-3cm。在密集低矮障碍物测试中同样表现优秀,能够精确避障每一个障碍物。
INDEMIND双目视觉导航方案扫地机器人样机避障演示2
同样,智能化的表现不应只是一台自动清扫工具,而是应该是懂得人机交互的清扫管家。双目导航模组基于立体视觉可实现智能跟随目标移动,配合交互指令,实现指定区域清扫,同时支持开放式智能决策、交互模板从而实现更多个性化需求,如智能安防,看护等。
总体而言,激光雷达技术原理简单,技术成熟,但已经面临技术天花板,而视觉导航智能性较高、成本较低、发展性更大,随着技术的进步,视觉导航将会有更加广阔的前景。
责任编辑:haq
-
激光
+关注
关注
19文章
2752浏览量
63484 -
扫地机器人
+关注
关注
20文章
741浏览量
52164
发布评论请先 登录
相关推荐
视觉、激光、结构光?扫地机器人导航避障技术盘点


科沃斯最新款扫地机器人搭载地平线旭日3芯片上市
关于扫地机器人的测试方法

智能扫地机器人是如何准确清扫全屋的?
扫地机器人停滞不前的原因是什么
我们拆了一款Tof+AI避障的扫地机
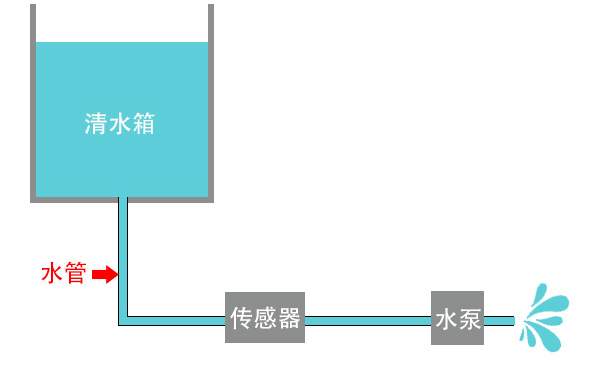
扫地机器人液位检测方案





 工商网监
工商网监
评论