 国产仿生四足机器人界的一次变革来了!
国产仿生四足机器人界的一次变革来了!
据机器人大讲堂获悉,今日,Dogotix(多够机器人)对外发布了两款已经批量生产的第二代高动态性能四足机器人,型号分别是DG-48A和DG-160A。
据内部数据显示,DG-48A自重13KG, 搭配峰值动力48N.m电机负重6KG,而DG-160A的自重为24KG, 搭配峰值动力160N.m电机 设计载重14KG。
这是一个巨大的提升,拿一组数据来说明,以DG-160A为例和波士顿动力SPOT-MINI进行性能对比:
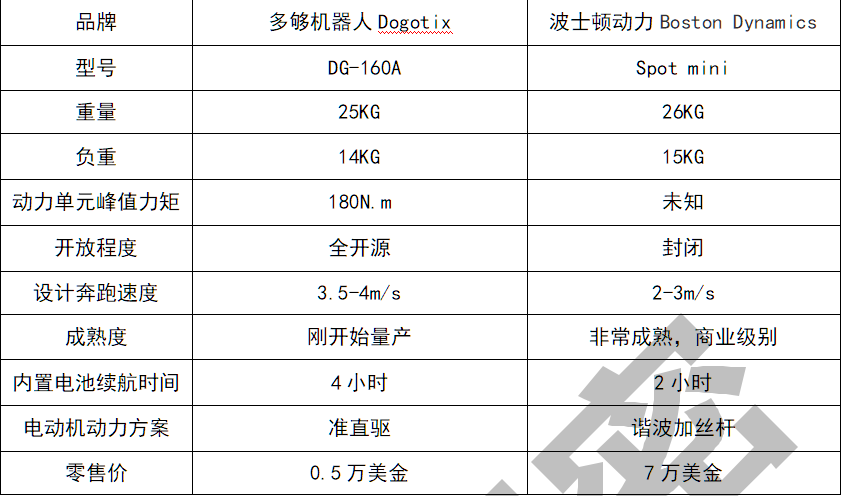
(数据来源:网络公开数据)
通过对比可以看出,DG-160A在输出动力、行驶速度、续航能力等方面已经有了和行业标杆波士顿动力Spot mini同台竞技的可能性。
虽然目前DG-160A相比于Spot mini还有一定差距,波士顿动力得益于其20年的软件技术积累在部分数据上仍然具有一定优势,不过这种差距正在迅速的缩小。如果按照DogoTix(多够机器人)目前的研发和迭代速度,在未来的8-12个月,预计DG-160A在软件方面也将同样达到国际领先水平。
作为对标波士顿动力Spot mini的仿生四足机器人,DogoTix(多够机器人)这款产品推出后,无疑会对行业领头羊波士顿动力的Spot mini 产生一定冲击,和许多国产机器人类似,依赖于Dogotix产品顶级的配置和仅为业界对标产品的8%这个极具性价比的定价,定能为促进中国仿生四足机器人这个行业的发展起到重要的推动作用!
在产品上,尤其值得注意的是,本次DogoTix(多够机器人)推出的24公斤级标配160牛米峰值扭矩的大狗DG-160A,这个型号兼具了负载与动力,或许将成为行业参考的经典设计。
(大狗DG-160A)
除此之外,Dogotix本次推出的小狗DG-48A型号机器人,整体重量仅13KG,并配置峰值动力48N.m的电机。
(小狗DG-48A)
据公开资料显示,目前,Dogotix的第一代产品ME-18A已经于几个月前发布,单价为1.8万元人民币,目前已经在售产品系列包括如下,且现已持续的批量供货中,交期1-2周,市场反响良好。
而第二代产品Dogotix小狗DG-48A和大狗DG-160A为本次发布的产品,现在均已开始供货,订单需要2-4周的交期,但基础硬件都已经规模化生产,在各大电商平台均能顺利购买。
此外,据机器人大讲堂了解,本次Dogotix还同时发布了四款不同级别的电机(扭矩分别为24N.m,48N.m,160N.m,240N.m),并且全部对外出售。
为了便于用户多方位的开发应用机器人,Dogotix团队宣布从控制器到核心器件均可以单独出售,并严格控制零售单价,做到极具性价比优势,为对机器人感兴趣的发烧友提供更多优质选择。
据机器人大讲堂了解到,与此同时,Dogotix团队的第三代产品也已经在紧锣密鼓的设计中,相信在不久后将会推出。
Dogotix团队内部消息透露,第三代产品相比本次发布的第二代产品无论在工业设计方面、动态控制方面还是软件运行算法方面都有较大的提高,相信发布后又将对业界带来一次冲击。
回到本次发布的两款产品,从Dogotix团队的运营模式上可以看到,除了强大的动力性能优势、极具性价比的价格优势和前卫的软硬件设计理念,Dogotix团队也一直秉承着开源精神,坚持产品全开源的商业模式,旨在让更多的人参与到仿生足式机器人的开发和建设中来,为推动整个行业的发展做出自己的贡献,这也是多够团队对产品的自信,也是潜心做四足机器人这件事的初心。
产品快速迭代,同时在性能上飞速提升的原因在于,Dogotix团队从成立之初就特别注重基础器件级别的研发和核心技术的自主突破。经过4年的技术研发积累,可以说Dogotix团队目前已经形成了在足式机器人底层及应用层均有完善专利的布局,而国内仅有两三家公司做出这样的成绩。
Dogotix团队希望通过长期持续的努力,能够达成仿生机器人走进人类社会的每一个角落的愿景,本次推出的两款极具性价比的仿生四足机器人,必定对这个行业的发展带来深远的影响。
在机器人大讲堂了解本次两款产品发布的过程中,有一个二代新品的技术细节让人感慨,Dogotix创始人坚持认为作为面向未来的科技产物,并不能像手机、汽车一样仅仅作为人们的生活工具,而是要具有自由灵魂的机器人。
Dogotix创始人认为,将仿生运动学和人工智能技术融合是其“灵魂”所在。所谓“自由”,这就要求机器人在不受人类的干预下能够自主的工作和生活。Dogotix团队基于这一思路出发,将基于机器视觉的自主无线非接触式充电和太阳能充电同时赋予到这两款机器人上面。
当机器人在室内工作时,自主检测自身电量,在电量不充足时,完全自主的找到自己的非接触式无线充电桩,并完成自主充电;此外,机器人壳体设计有太阳能电池板,当机器人在户外工作时,即便是没有人类活动的野外环境,机器人也可以完成自我充电。这样以来即使机器人离开人类也可以生存和神经网络进化。
目前从新款机器人的运行视频中,我们不难看出,在机器人启动时会出现身体倾斜等情况,暂时没有做酷炫的动作。不过要知道,这仅仅为Dogotix团队进行了不到一个月的软件算法的新品测试调整的结果,硬件本体的动力和动态性能只发挥出了机器人应有性能的25%,团队将持续的进行算法和软件的升级优化,无需太多时日,本款机器人无论在动力方面或是动态性能方面将会有一个质的飞跃!
基于Dogotix团队持续的基础器件级别的研发和核心技术的自主突破,在动力电机(仿生足式机器人最重要部件之一)方面实现行业突破,使其在约1.25 KG自重的基础上达到160N.m(特制版可达200牛米)的峰值输出扭矩和24弧度/秒的角速度爆发力,并同时可以兼顾负重和高动态性能的要求,这一成果属于国际领先水平。
另外因为Dogotix团队坚持开源路线,从目前国内各行业发展情况下来看,软件随时可以更新至最新版本供开发者使用,这无疑能更加符合这一阶段的客户需求。
据悉,在融资方面,Dogotix约一个月前接受了索道资本500万元的天使轮融资。并计划在未来的三个月内以8000万元人民币的估值进行下一轮1000-1500万元人民币的融资,这笔融资将用于后续新产品的设计研发与已推出产品的规模化生产。
投资人认为,Dogtix这支在CEO赵同阳与CTO杨平博士带领下的8人研发团队,坚持梦想持续前进到今日,从创业之初就坚持以引领仿生机器人产品制造风口,而非坐等风口,不以赚钱为首要目标,坚持长跑,这是一件很酷的事情。
Dogotix团队对机器人大讲堂表示,也希望更多行业精英的加入Dogotix团队,为了梦想而奋斗!
据机器人大讲堂了解到,目前,已经在售的第一代产品ME-18A已经开源了全部的相关资料,可以在Dogotix官方网站(http://dogotix.com/,建设中)和论坛(https://mit-fans.com/)中下载;本次发布的第二代产品DG-48A和DG-160A的全套资料也正在紧锣密鼓的整理当中,不日将陆续对外开放。
责任编辑:lq
-
电机
+关注
关注
139文章
8317浏览量
142212 -
四足机器人
+关注
关注
1文章
87浏览量
15133 -
波士顿动力
+关注
关注
3文章
176浏览量
12891
原文标题:国产仿生四足机器人界的一次变革来了!!
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论