 LEDs状态灯任务(线程)设计 (基于RTOS)
LEDs状态灯任务(线程)设计 (基于RTOS)
我们学习MCU开发,大部分都是面向过程的开发,但实际项目一般要求我们有面向对象(模块化)的方式来开发。
刚学习C语言开发的朋友,应该常常听说面向对象,但实际对于面向对象开发可能还是不太了解。
为了初学者进一步理解,本文结合实际项目(LEDs状态灯)给大家带来比较基础的模块化设计。
Ⅰ关于C语言的模块化
对于MCU的开发,大部分人都还是习惯性用的C语言,原因之一在于C语言具有高效的特点。
可以了解一下,许多操作系统的内核使用的编程语言,其实都用到了C语言,这就是C语言的优点,也是C语言这么多年不衰败的原因。
说回来,对于MCU的开发,除了C语言,当然还可以其它语言,像C++有许多人就用上了。
C++语言本身就是面向对象的开发语言,定义一个类,可以包含许多成员。站在C语言的角度,可以理解成定义一个结构体,里面包含许多数据类型。如下面要说的LEDs数据结构体:
typedef struct { uint8_t Mode; //模式(常灭 常亮 闪烁) uint8_t Status; //当前状态(灭 亮) uint16_t OffTimes; //灭时间(xLED_COUNT_PERIOD毫秒) uint16_t OnTimes; //亮时间 uint16_t Counter; //计数(计时) void (*OffFun)(void); //灭函数接口 void (*OnFun)(void); //亮函数接口 }LED_TypeDef;
可以看到,结构体里面包含整型变量,函数指针。
补充,指针函数与函数指针的区别:
1、指针函数:本质是一个函数,函数返回类型是某一类型的指针。
格式: 类型标识符 *函数名(参数表)
如:int *f(x,y);
2、函数指针:本质是一个指针,指向函数的指针变量。
格式:类型说明符 (*函数名)(参数)
如:int (*f) (int x);
Ⅱ为什么要模块化设计
假如一个系统中做的事情非常多,比如:采集两个增量式编码器、两个绝对值编码器、控制4个电机、控制多个LED状态灯、通信收发数据,采集温度、湿度、超声波雷达等···许多模块,那么问题来了,这么多模块,你的软件该如何设计?
答案就是需要模块化设计。
模块化设计,包含底层驱动,中间接口函数,应用程序等。对于MCU级别的开发,为了规范,建议大家从底层设计到应用层设计都按照模块化的方式来设计。
简单的来说,模块化就是源文件、数据结构、变量、函数命名等需要按照模块的方式来设计。比如LEDs状态灯:IO口的定义用LED(模块),文件名用led,变量、函数名抬头用LED,定义一个LED数据结构(模块的数据结构)等。
模块化的设计优点在于:便于源代码管理、移植、理解等等。(相信有许多自己写的代码,放一段时间之后,重新再次阅读,可能看了半天都不明白源代码的意思。)
ⅢLEDs实例讲述
为方便大家理解,拿一个简单的LEDs状态灯的实例来分析。里面使用到了RTOS简单系统延时(本文不讲述关于RTOS的知识)。文末提供例程下载地址。
1.描述
绿、黄、红三个(可以自己添加许多个)LED状态灯,可独自实现常灭、常亮、闪烁三个模式。
闪烁:灭、亮时间可设置(提供函数接口修改)。
在一个线程(任务)里面执行。
3个LED不同亮灭时间效果:
2.数据结构
typedef struct { uint8_t Mode; //模式(常灭 常亮 闪烁) uint8_t Status; //当前状态(灭 亮) uint16_t OffTimes; //灭时间(xLED_COUNT_PERIOD毫秒) uint16_t OnTimes; //亮时间 uint16_t Counter; //计数(计时) void (*OffFun)(void); //灭函数接口 void (*OnFun)(void); //亮函数接口 }LED_TypeDef;
为了方便理解,只使用一个数据结构(实际大的项目可能有多个包含,类似C++继承关系)。
3.底层LED函数接口
void LEDGreen_Off(void);
void LEDGreen_On(void);
void LEDYellow_Off(void);
void LEDYellow_On(void);
void LEDRed_Off(void);
void LEDRed_On(void);
主要就是亮灭函数接口,这里提供三组LED(根据需求可添加)。
4.定义局部变量
static LED_TypeDef sLEDG_Structure; //绿灯 static LED_TypeDef sLEDY_Structure; //黄灯 static LED_TypeDef sLEDR_Structure; //红灯
5.初始化变量
/************************************************函数名称 : LED_Data_Init功 能 : 数据初始化参 数 : 无返 回 值 : 无作 者 : strongerHuang*************************************************/ static void LED_Data_Init(void){ /* 绿灯 */ sLEDG_Structure.Mode = LED_MODE_FLICKER; //初始化为闪烁 sLEDG_Structure.OffTimes = 50; //灭亮时间 sLEDG_Structure.OnTimes = 50; sLEDG_Structure.Counter = 0; //计数归零 sLEDG_Structure.OffFun = LEDGreen_Off; //灭函数接口 sLEDG_Structure.OnFun = LEDGreen_On; //亮函数接口 /* 黄灯 */ sLEDY_Structure.Mode = LED_MODE_ON; //初始化为常亮 sLEDY_Structure.OffTimes = 0; //灭亮时间 sLEDY_Structure.OnTimes = 0; sLEDY_Structure.Counter = 0; //计数归零 sLEDY_Structure.OffFun = LEDYellow_Off; //灭函数接口 sLEDY_Structure.OnFun = LEDYellow_On; //亮函数接口 /* 红灯 */ sLEDR_Structure.Mode = LED_MODE_ON; //初始化为常亮 sLEDR_Structure.OffTimes = 0; //灭亮时间 sLEDR_Structure.OnTimes = 0; sLEDR_Structure.Counter = 0; //计数归零 sLEDR_Structure.OffFun = LEDRed_Off; //灭函数接口 sLEDR_Structure.OnFun = LEDRed_On; //亮函数接口 /* 对外调用接口(例子) */ LEDG_Set(LED_MODE_FLICKER, 50, 50); LEDY_Set(LED_MODE_FLICKER, 50, 10); LEDR_Set(LED_MODE_FLICKER, 20, 30);}
这里重要的就是要初始化灭亮函数接口。
6.LEDs任务(线程)
/************************************************函数名称 : LED_Task_Proc功 能 : 状态灯任务程序参 数 : pvParameters --- 可选参数返 回 值 : 无作 者 : strongerHuang*************************************************/ static void LED_Task_Proc(void *pvParameters){ static TickType_t xLastWakeTime; xLastWakeTime = xTaskGetTickCount(); for(;;) { //间隔固定计数周期(采样时间) vTaskDelayUntil(&xLastWakeTime, LED_COUNT_PERIOD); /* 浏览LEDs */ LED_Scan(&sLEDG_Structure); LED_Scan(&sLEDY_Structure); LED_Scan(&sLEDR_Structure); }}
流程图:
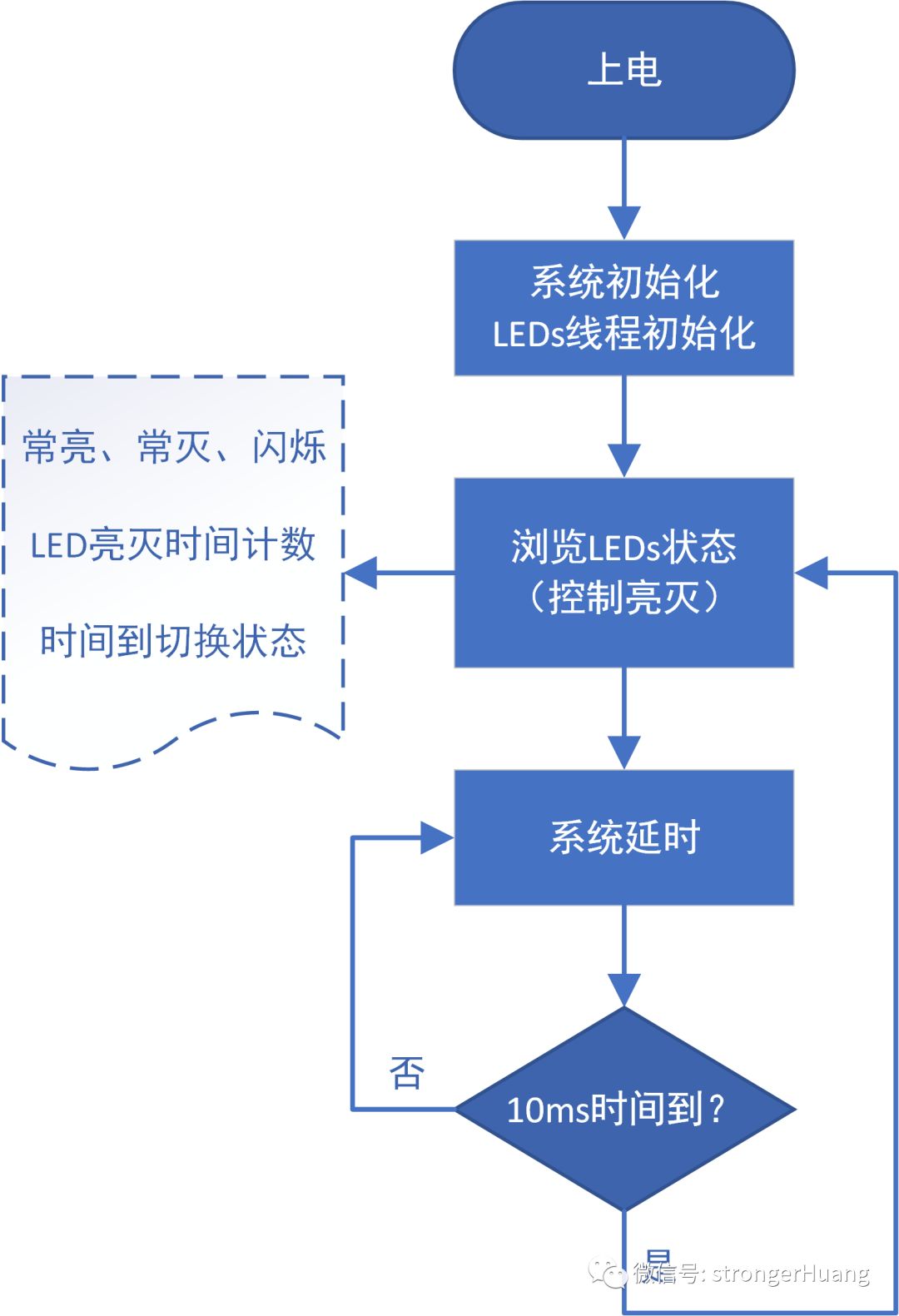
7.LED浏览(或者说处理)
/************************************************函数名称 : LED_Scan功 能 : 状态灯扫描(修改状态)参 数 : LED_Struct --- 状态灯数据结构返 回 值 : 无作 者 : strongerHuang*************************************************/ static void LED_Scan(LED_TypeDef *LED_Struct){ /* 1.常灭模式 */ if(LED_MODE_OFF == LED_Struct->Mode) { LED_Struct->Status = LED_STATUS_OFF; //状态置为"灭" LED_Struct->OffFun(); //灭灯 } /* 2.常亮模式 */ else if(LED_MODE_ON == LED_Struct->Mode) { LED_Struct->Status = LED_STATUS_ON; //状态置为"亮" LED_Struct->OnFun(); //亮灯 } /* 3.闪烁模式 */ else if(LED_MODE_FLICKER == LED_Struct->Mode) { /* 在灭的状态 */ if(LED_STATUS_OFF == LED_Struct->Status) { LED_Struct->Counter++; if(LED_Struct->Counter >= LED_Struct->OffTimes) { LED_Struct->Counter = 0; LED_Struct->OnFun(); //亮灯 LED_Struct->Status = LED_STATUS_ON; //状态置为"亮" } } /* 在亮的状态 */ else if(LED_STATUS_ON == LED_Struct->Status) { LED_Struct->Counter++; if(LED_Struct->Counter >= LED_Struct->OnTimes) { LED_Struct->Counter = 0; LED_Struct->OffFun(); //灭灯 LED_Struct->Status = LED_STATUS_OFF; //状态置为"灭" } } else { LED_Struct->Status = LED_STATUS_OFF; //状态置为"灭" } } /* 4.未知模式 */ else { LED_Struct->Status = LED_STATUS_OFF; //状态置为"灭" LED_Struct->OffFun(); //灭灯 }}
源代码工程下载地址:
链接:https://pan.baidu.com/s/1cNtwJDdCOfyYwsvKCclFyw
密码:kk74
-
mcu
+关注
关注
146文章
16016浏览量
343583 -
LEDs
+关注
关注
1文章
34浏览量
25374 -
RTOS
+关注
关注
20文章
776浏览量
118790 -
线程
+关注
关注
0文章
489浏览量
19495
发布评论请先 登录
相关推荐
基于RTOS的应用进程中的典型线程

新手必看的RTOS基础知识

RTOS中的线程、进程和协程详解

SCP线程模型特点
FreeRTOS中任务状态与任务优先级
构建RTOS Kernel指南 (上)



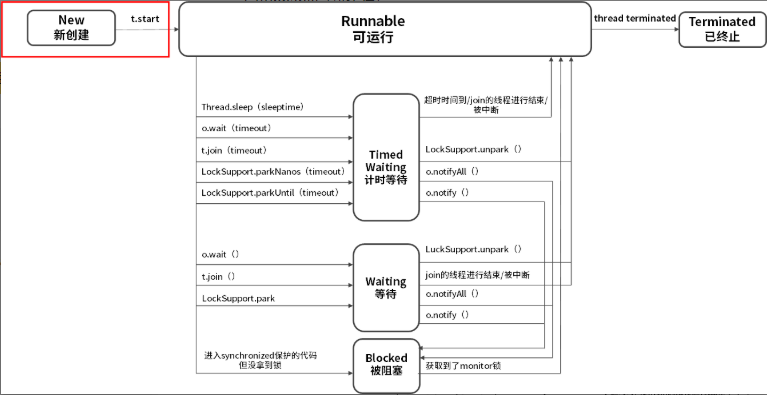
在Java中的线程状态转换





 工商网监
工商网监
评论