 简易Arduino机械臂DIY图解
简易Arduino机械臂DIY图解
步骤1:所需材料
此项目的工具和材料非常便宜,并且运行的资金不应超过$ 20 USD。如果周围有一些伺服器,那么您很幸运。我还应该指出,如果您拥有更强大的伺服器,可以使用3而不是4来代替我。这些是我购买零件的地方,请在购买前查看其他网站的优惠。
-冰棍棍$ 3.65 [如果您想替代更适合的材料]
-Micro Servos x6 $ 16 [请尝试寻找交易]
-电位器x3 $ 2.74 [同样,您要在其中放置一些]
-跳线或只是普通线
我使用了Yourduino,因为它带有许多端口,可让您一次插入多个伺服器。我将限制保持在大约4,以免烧坏电路板。
如果您使用常规的Arduino,则将需要一个电动机护罩,以支持4个电动机。
-胶枪,锤子和钉子,用来固定手臂的底座控制器的外壳和外壳
*如果要使控制器电路更坚固,更简单,则可选的pcb也可以。
步骤2:步骤2:组装基地和前臂
好吧,找到一块木板或材料来支撑整个手臂结构的重量。找到材料后,我发现最好将伺服器粘上,然后将托架钉在木头上,这样可以得到更多的支撑和重量分布。做这样小的事情会使您的微型伺服系统变得强大2倍[我没有做数学]。然后将接下来的两个伺服器热粘合到基本伺服器的顶部。确保它们面对相反的方向但平行,并测试伺服器是否可以平行移动。将可能会压住伺服器的材料热粘。
接下来,您必须布置手臂结构所需的框架,然后将伺服器的齿轮热粘到冰棒上,使其粘在冰棍上将控制。我没有足够的电动机来增加肘部支撑,所以使框架具有广阔的前景。因此,通过这样设置,我为手臂创建了更大的范围。
请确保肩部伺服器的连接正确粘合,并且彼此之间的距离不远。最后添加下一个水平框架支撑,以确保在使用中电动机一起移动。
步骤3:步骤3:组装爪子
首先必须涂上顶部伺服电机,并用胶水将其固定到位。确保牢固的结合力会让您讨厌机器人在测试过程中破裂。同样,在此时,请确保添加只有一端的特殊齿轮。这就是我们用来控制爪子的东西。
爪子
从玩具制造工具包中发现了我的爪子。我什至不认为这应该是爪子。您可以选择购买自己的机械爪,也可以四处寻找家用物品并利用自己的创造力来制作。那正是我所做的。也许您不想要爪子,也许您想要一个可以给您高五,拳头颠簸的机器人,或者只是拥有一个平台,以便您可以在其上放置物料。它甚至可能是焊接的帮手。
第4步:第4步:将所有内容连接起来的时间
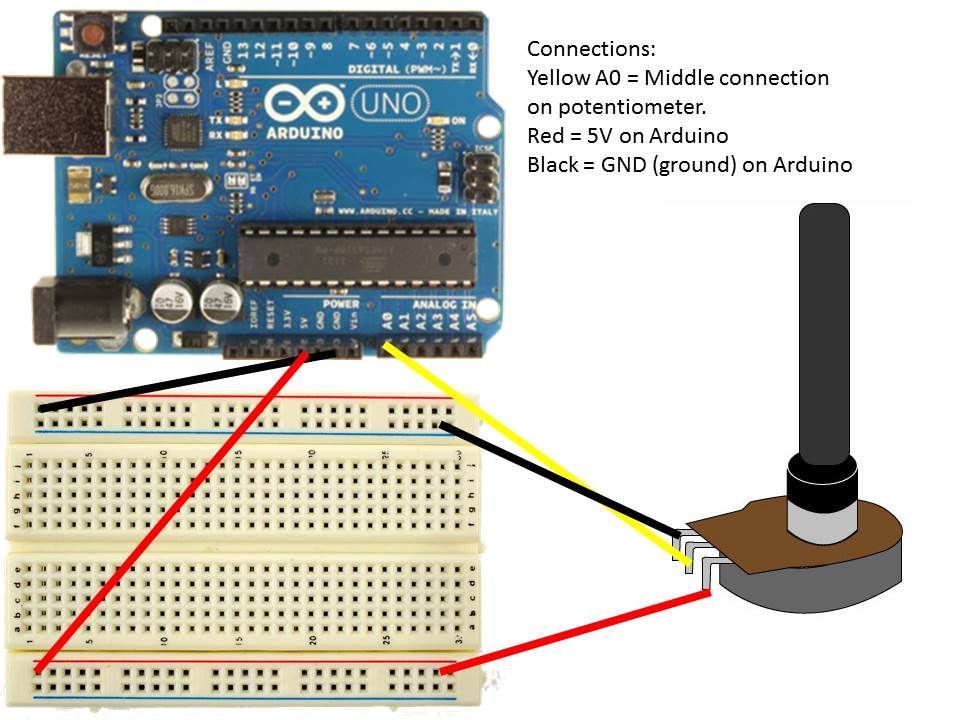
好,现在我们将创建允许机器人手臂四处走动并做事的控制器。我可能会添加一些很酷的东西。第一个图像显示了电位计的接线,因此务必遵循以下格式,这一点非常重要。我所做的只是将面包板的5伏电压和接地电压直接插入面包板的端子,因为显然3个电位器引脚不能插入一个5伏孔中。
首先,我们从将电位器[Pots]插入其应有的端子开始。
将每个Pot的中间从右到左连接到A0,A1,A2。
将Arduino的GND和5伏电压连接到面包板上,然后将锅gnd连接到gnd行中。
将锅的正极连接到右边进入5伏特行。
最后插入伺服器。
底基移到3
左肩移到5
右肩移到6
爪移到11/li》
应该的,再次测试您的伺服器以确保一切正常
步骤5: 5:代码
好的,因此代码已附加并发布在下面。该代码的前半部分标识了控制手臂所需的各种材料。代码的下半部分告诉arduino,当您将锅向某个方向旋转时该怎么做。我还应该指出,我能够欺骗代码以允许两个伺服器同时运行,而不是一次运行。这允许肩膀一起移动。
/*
July 14th, 2014
Simple robotic arm that is controlled by three pots.
*/
#include
Servo base; // Tells the arduino what servos we are going to
Servo left; // use. I name them by they function or location.
Servo right;
Servo claw;
int potpin = 0; //Tells the arduino the locations of the pots
int potpin2 = 1;
int potpin3 = 2;
int val; //Tells the arduino what variable to use to store
int val2; // the position when turned.
int val3;
void setup()
{
base.attach(3);
left.attach(5); //Tells the arduino where the servos are plugged
right.attach(6); // in.
claw.attach(11);
}
void loop(){
{
val = analogRead(potpin); //tells arduino which pot controlls
val = map(val, 0, 1023, 0, 179); //current servo, and then maps
base.write(val); //the dial the pot is on to move the servo
delay(15); //waits for the servo to move
}{
val2 = analogRead(potpin2);
val2 = map(val2, 0, 1023, 0, 179);
left.write(val2);
delay(15);
{
val2 = analogRead(potpin2);
val2 = map(val2, 0, 1023, 0, 179);
right.write(val2);
delay(15);
}
{
val3 = analogRead(potpin3);
val3 = map(val3, 0, 1023, 0, 179);
claw.write(val3);
delay(15);
}
}
}
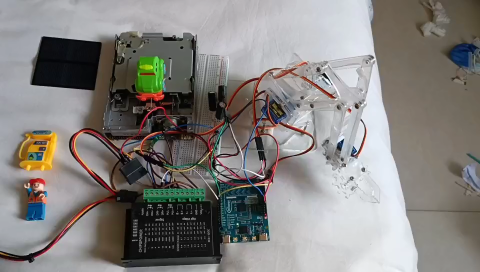
步骤6:步骤6:视频演示和结尾注释
好的,就这样。这再次是一个原型项目,并且是一个工作演示,以展示该产品可能具有的全部潜力。我提供了一个视频演示,如果你们花时间订阅我的YouTube频道,我将不胜感激,它将很快推出许多新视频和周末项目。 “我的频道”
我计划最终为该机械臂创建3D模型,并在爪子和马达上进行扩展,以便实际上可以成为功能齐全的机械臂。
第7步:疑难解答
我听到的只是嗡嗡声!
快速拔下电动机或电源。这意味着负载对于电动机来说太重,或者电动机已卡在其当前位置。请用一只手轻轻地尝试朝任何方向旋转电动机。
它不断下降!
然后,要么上层太重,要么手臂的底部没有得到足够的加固。
-
Arduino
+关注
关注
184文章
6427浏览量
184830 -
机械臂
+关注
关注
9文章
471浏览量
23821
发布评论请先 登录
相关推荐
Arduino使用tft触摸屏的转换座如何DIY?
使用Arduino和处理Android应用程序DIY车速表

带有Arduino、乐高和3D打印部件的DIY双足机器人
用于Arduino Due的DIY Braccio机器人手臂护罩





 工商网监
工商网监
评论