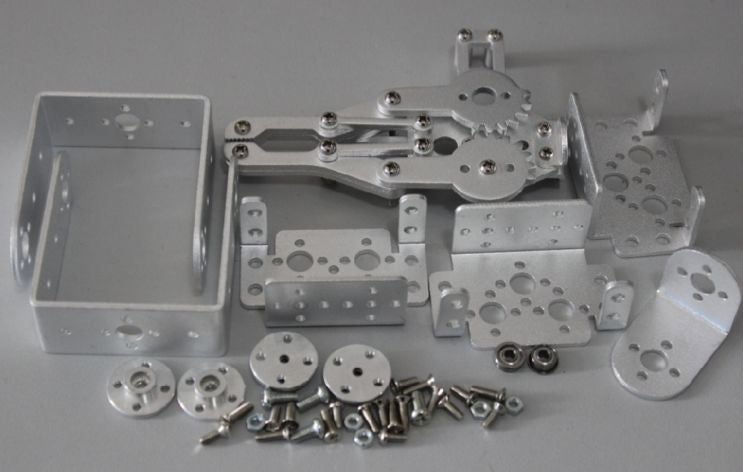
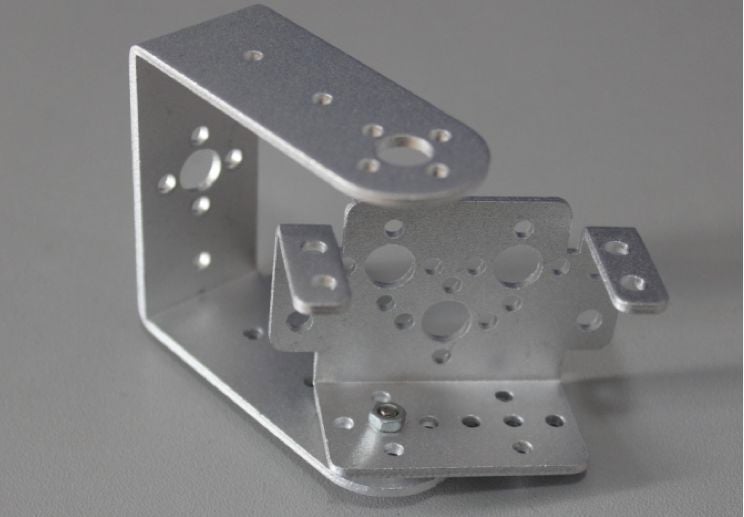
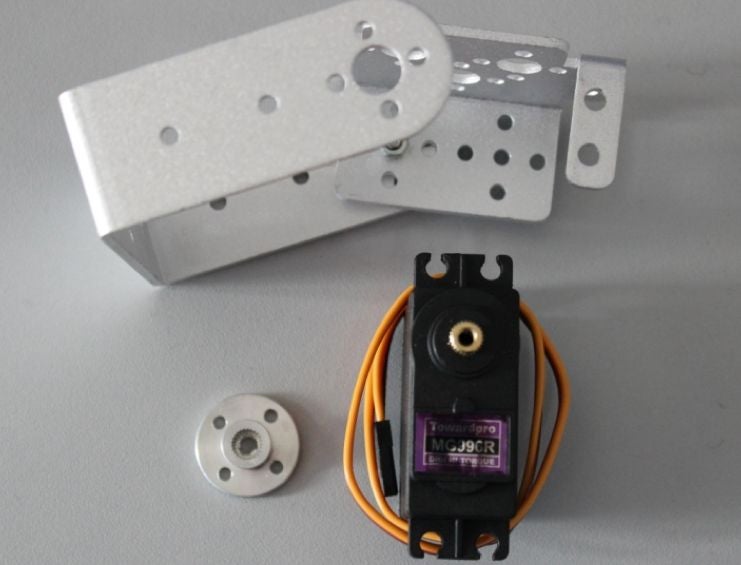
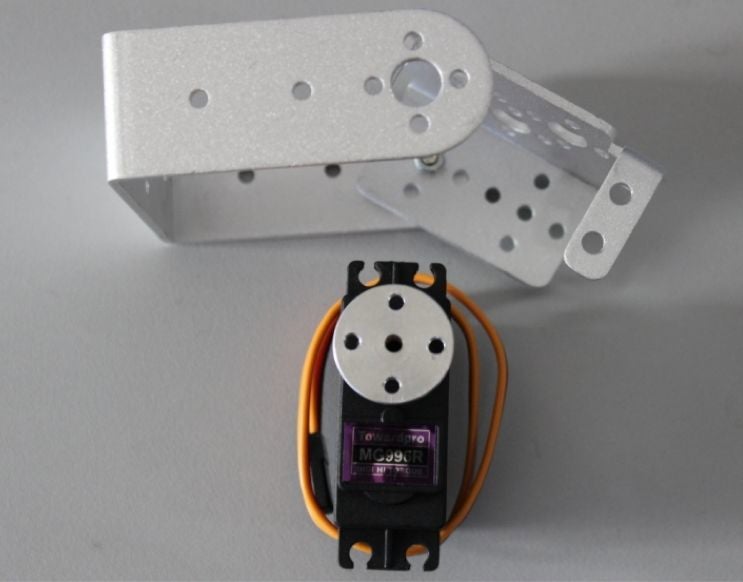
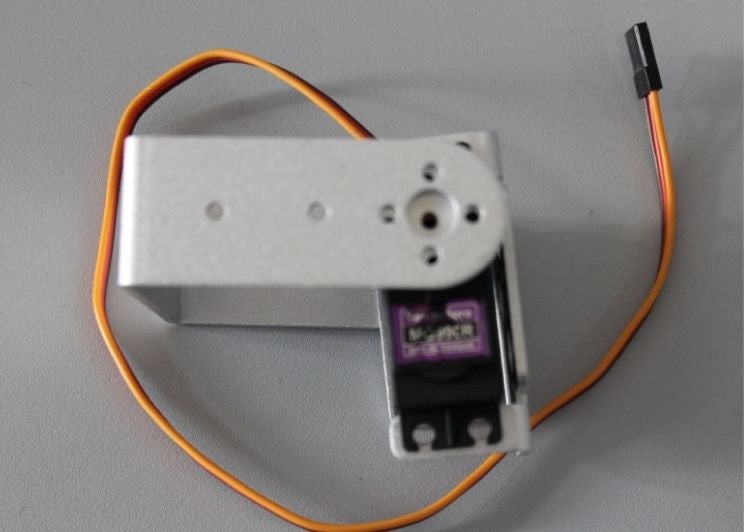
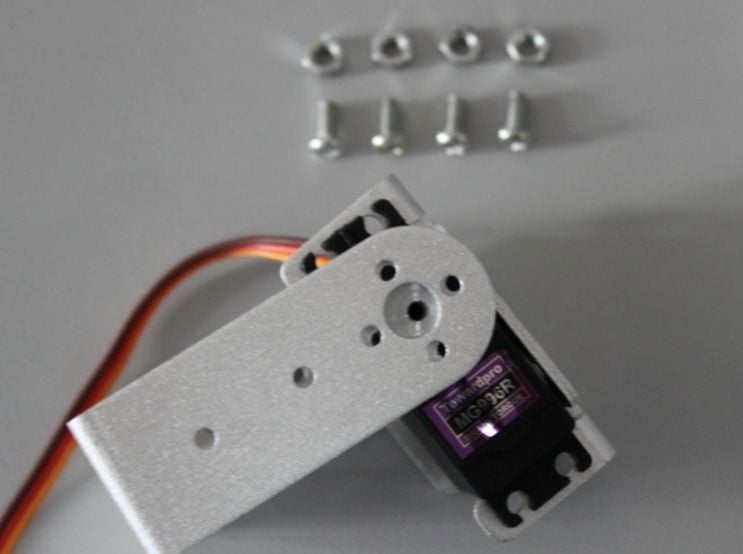
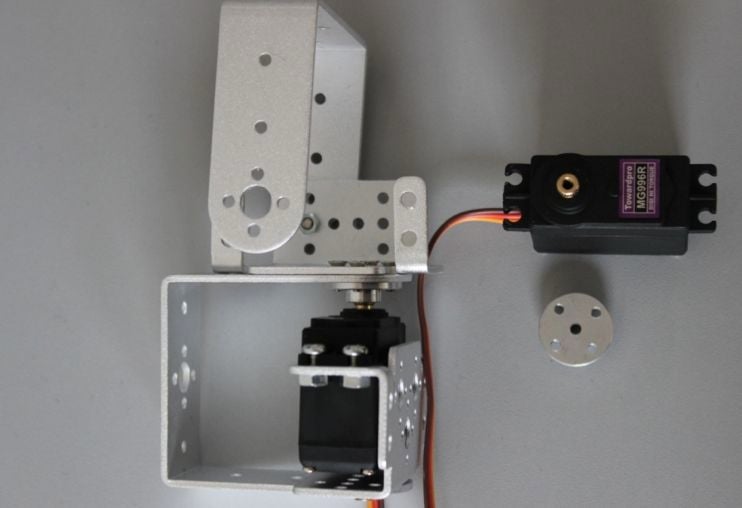
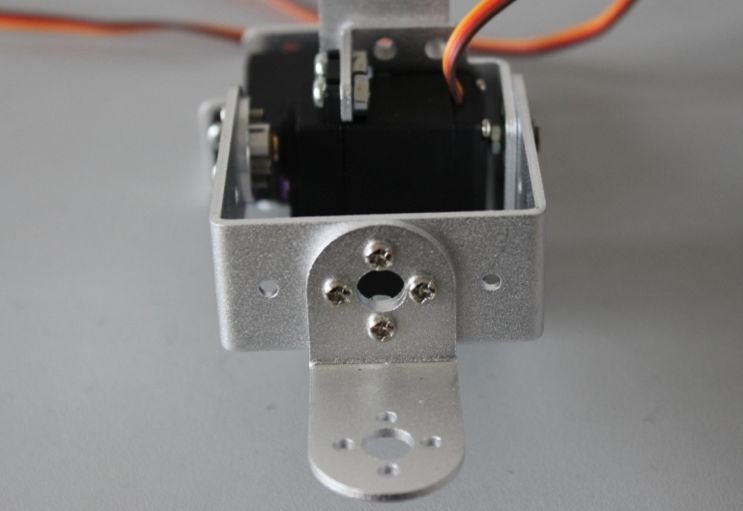
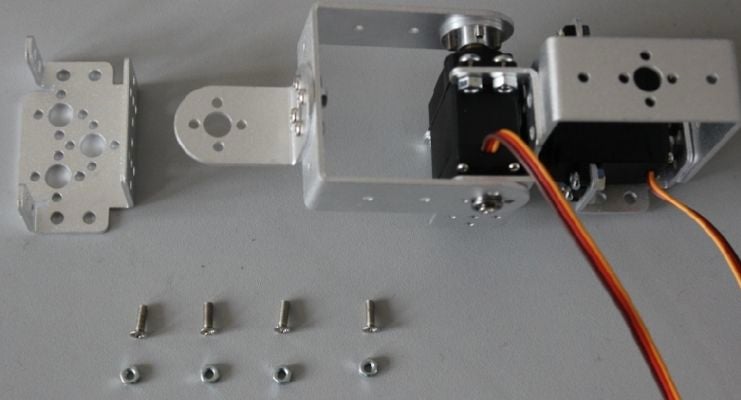
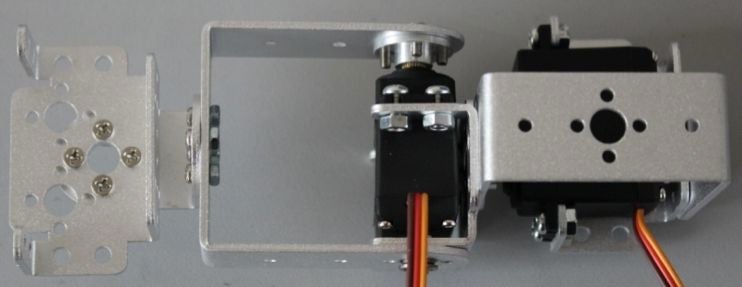
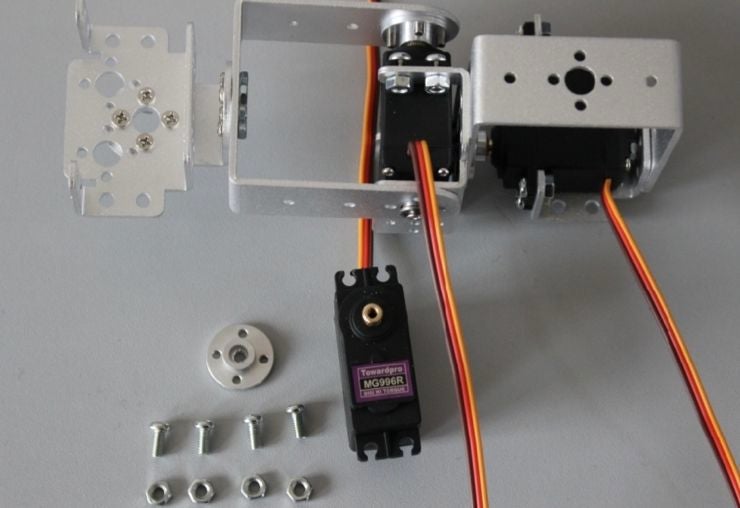
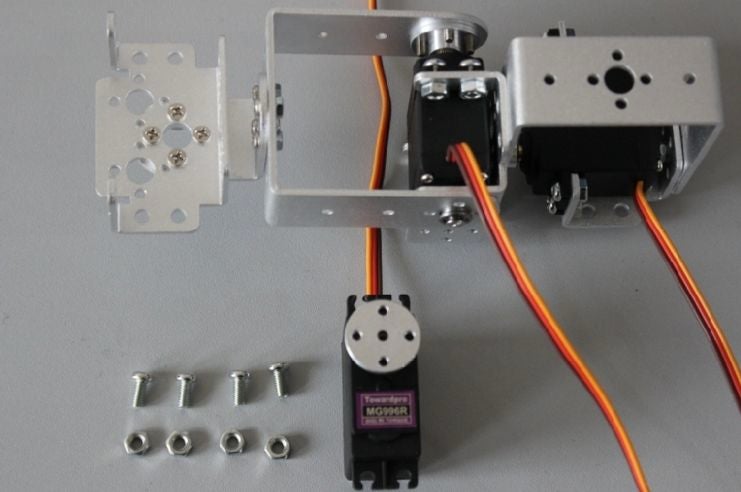
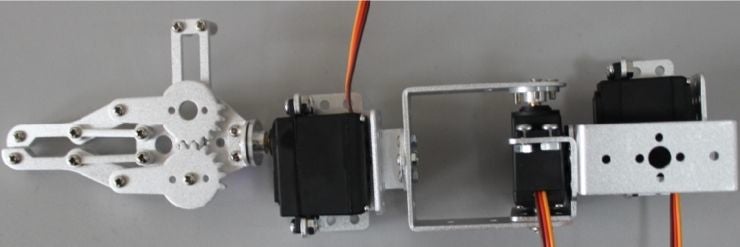
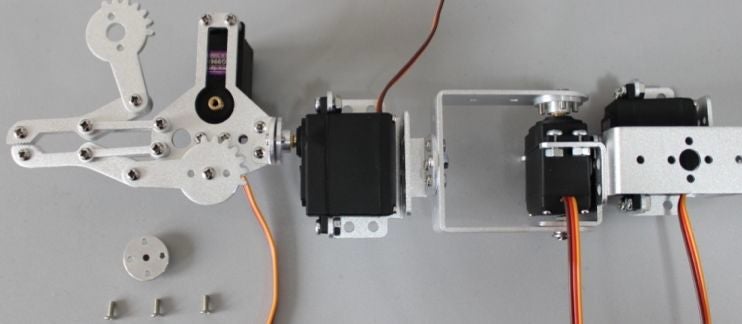
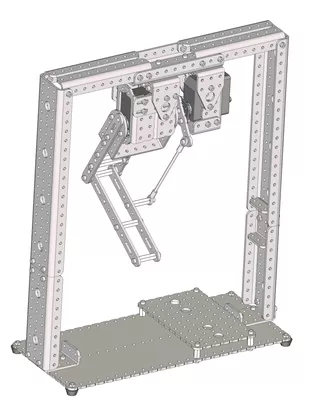
 4自由度机械臂的制作图解
4自由度机械臂的制作图解








声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机械臂
+关注
关注
9文章
471浏览量
23824
发布评论请先 登录
相关推荐
【先楫HPM5361EVK开发板试用体验】(原创)5.手把手实战AI机械臂
HPM5361EVK开发板。现在开始设计实战AI机械臂的程序。
代码结构
由于编写一个完整的用先楫HPM5361EVK开发板控制三组四自由度机械臂
发表于 02-06 10:28
【国产FPGA+OMAPL138开发板体验】(原创)2.手把手玩转游戏机械臂
。但由于篇幅限制,下面是一个简化的项目方案和步骤:
(我会尽量逐行解释关键部分的代码。谢谢!)
1. 硬件连接与配置
首先,需要将TI OMAP-L138 FPGA处理器开发板、三组四自由度机械臂以及红外
发表于 02-01 20:18
一文读懂六自由度激光跟踪仪
激光跟踪仪与空间姿态探头(iProbe 6D姿态探头)配合使用,就组成六自由度激光跟踪仪。它能够根据合作目标的精确空间姿态对被测工件的内部特征、隐藏特征或曲面等复杂特征进行快速、高精度的测量。

六自由度激光跟踪仪的特点
GTS6000激光跟踪仪与空间姿态探头配合组成六自由度激光跟踪仪,能够根据合作目标的精确空间姿态对被测工件的内部特征、隐藏特征或曲面等复杂特征进行快速、高精度的测量。

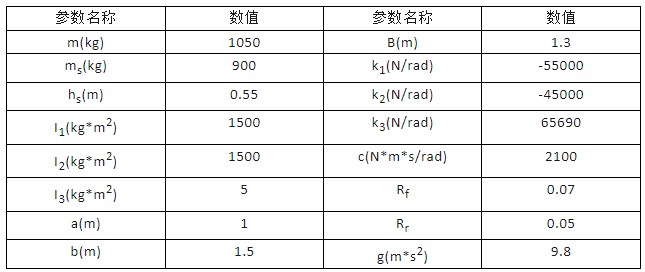
基于Simulink的汽车2自由度模型
本期采用Simulink建立汽车2自由度动力学模型。为了便于掌握汽车稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
发表于 06-28 16:39
•1327次阅读
【飞凌i.MX9352开发板试用】+机械臂游戏2游戏操纵杆控制四自由度机械臂(开源)原创首发
/brightness
fi
控制四自由度机械臂 源代码:
#!/bin/bash
port=\"/dev/ttyUSB2\"
baudrate=\"9600\"
发表于 06-24 21:50
4自由度并联机器狗实现下蹲功能
1. 功能说明 本文示例将实现R328a样机4自由度并联机器狗下蹲的功能。 2. 结构说明 本样机的并联驱动结构与 【R082】4自由度并联四足 类似,两款样机可以

为什么人机协作机械手是7个自由度,而不是6个?
人的手臂(腕关节到肩关节)有几个自由度?我想绝大部分人都没有想过,更别说去了解有哪几个自由度,即使是学工科的人,也未必能解释清楚。没想到知乎上居然有人把这个问题回答的这么专业有内涵,同时又那么有哲理,忍不住想要把这个答案分享一下。

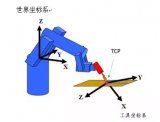
如何快速完成6自由度工业机器人的工具校准?
随着机器人变得日益成熟,它们已经能够应用到处理越来越多的工业工序。6自由度(6Dof)机器人能够执行复杂的动作,因而可以在许多复杂的工业任务当中展示良好的性能,比如码垛、搬运、涂胶和焊接等。6自由度机器人可以提举和灵活地操纵重型载荷,并通过复杂的几何运动对载荷进行精确操控
【CW32饭盒派开发板试用体验】+机械臂游戏项目(开源)(4)多加点东西
接上三篇,继续本项目开发。【CW32饭盒派开发板试用体验】+机械臂游戏项目(开源)(1)开箱试验舵机 - 武汉芯源MCU - 电子技术论坛- 广受欢迎的专业电子论坛! https
发表于 05-08 18:40





 工商网监
工商网监
评论