 如何制作Wi-Fi控制的四轮机器人
如何制作Wi-Fi控制的四轮机器人
步骤1:组件列表

Wemos D1 Mini [数量– 1]
PCF8574端口扩展器IC [数量– 1]
12V锂离子电池[数量– 1]
4WD机器人智能汽车底盘套件[数量– 1]
步骤2:项目的大脑-ESP8266开发板(Wemos D1 Mini)

Wemos D1 Mini 是基于ESP-8266芯片的具有4MB闪存的微型Wi-Fi开发板。
具有11个数字输入/输出引脚,所有引脚均支持中断/pwm/I2C/单线(D0除外)
具有1个模拟输入(最大3.2V输入)
该板基于ESP8266,因此与Arduino IDE兼容,因此可以使用Arduino进行编程,也可以使用Lua编译器进行编程。它还支持串行和OTA编程。
我们将使用Arduino IDE对Wemos D1 Mini进行编程。要使用Arduino IDE对该板进行编程,需要满足以下要求。
要求:-
CH340G驱动程序
从以下位置安装最新的Arduino IDE: Arduino网站。
用于编程的微型USB电缆
在安装驱动程序和arduino软件之后,您需要在Arduino IDE内安装“ ESP8266 WiFi芯片的Arduino核心”,以便我们可以在Arduino环境中对ESP8266芯片进行编程。此ESP8266 Arduino核心可让您使用熟悉的Arduino函数和库编写草图,并直接在ESP8266上运行它们,而无需外部微控制器。
ESP8266 Arduino核心随附的库可使用TCP和UDP通过WiFi进行通信, HTTP,mDNS,SSDP和DNS服务器,进行OTA更新,在闪存中使用文件系统,与SD卡,伺服器,SPI和I2C外设配合使用。
下载以下文档以获取帮助关于如何安装Esp8266 arduino内核。

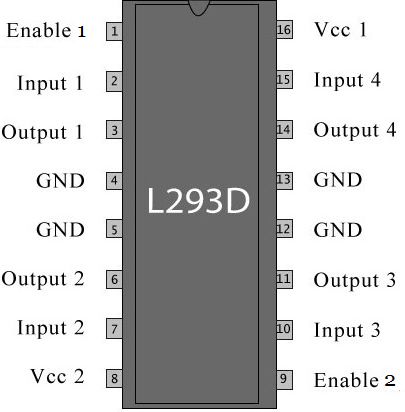

电动机驱动器是一种用于电动机的IC,可让您同时控制两个电动机的工作速度和方向。
L293d设计用于可以在5 V至36 V的电压范围内提供双向驱动电流。L293D可以同时驱动2个直流电动机。
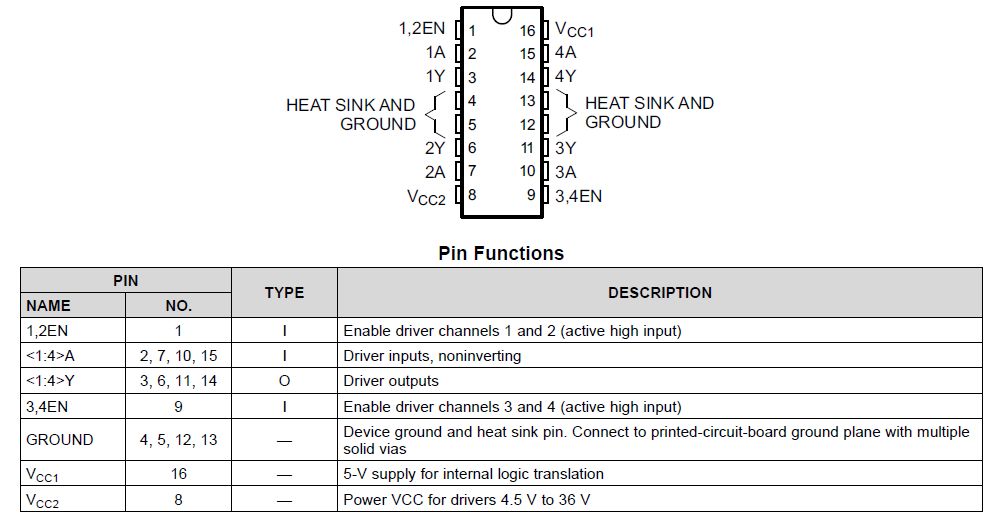
L293D是16引脚电动机驱动器IC。每个电机有4个INPUT引脚,4个OUTPUT引脚和2个ENABLE引脚。
L293D特性:
每通道600mA输出电流能力
各个通道的时钟和逆时针方向控制。
L293d的引脚说明:
引脚1:当Enable1为高电平时,IC的左侧部分将工作,即,与引脚3和引脚6连接的电动机将旋转。
引脚2:输入1,当此引脚为高电平时,电流将流经输出1。
引脚3:输出1,该引脚与电动机的一个端子连接。
引脚4/5:GND引脚
引脚6:输出2,该引脚与电动机的一个端子连接。
引脚7:输入2,当此引脚为高电平时,电流将流经输出2。
引脚8:VCC2,该引脚用于为来自所连接电机的电源供电最大5V至36V取决于连接的电动机。
引脚9:当启用2为高电平时,IC的右侧部分将工作,即与引脚11和引脚14连接的电动机将旋转。
引脚10:输入4,当此引脚为高电平时,电流将流经输出4。
引脚11:输出4,该引脚与电机的一个端子连接。
引脚12/13:GND引脚
引脚14:输出3,该引脚与电动机的一个端子连接。
引脚15:输入3,当此引脚为高电平时,电流将流经输出3。
引脚16:VCC1,用于为IC逻辑供电,即5V。
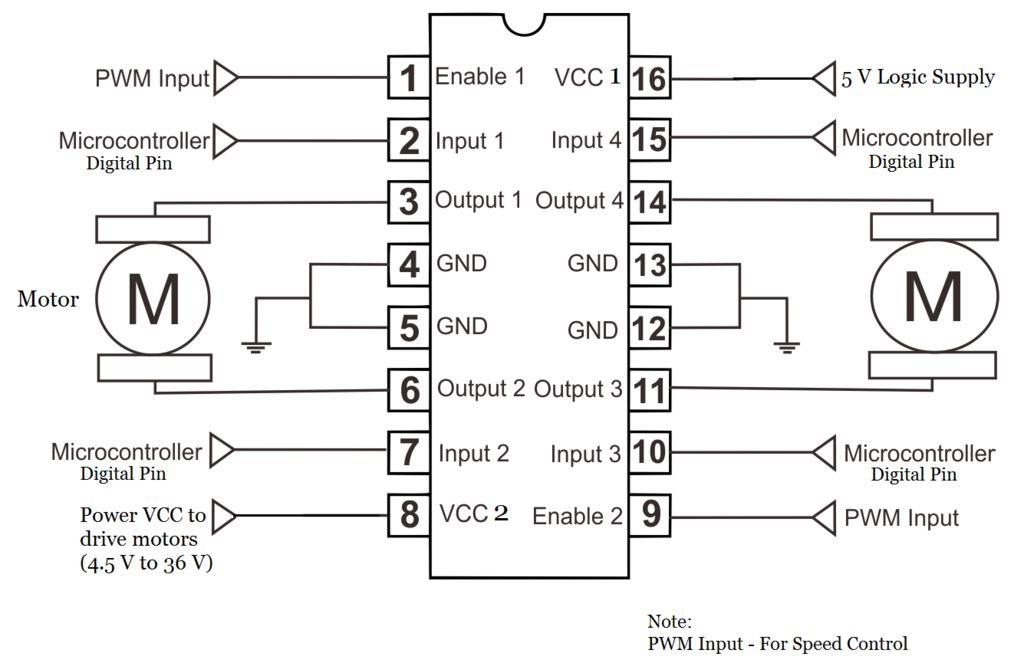
因此,您会看到需要3个数字引脚来控制每个电动机(一个引脚用于速度控制,两个引脚用于方向控制)。如果一个L293d控制两个直流电动机,那么我们将需要两个L293d IC来控制四个直流电动机。我们将在该项目中使用塑料BO电机。因此,您会看到我们需要12个数字引脚来同时通过速度和方向控制来独立控制所有四个DC电动机。
但是如果您看到Wemos D1 mini只有11个数字I/O引脚和1个模拟I/O引脚销。为了解决这个问题,我们将四个启用引脚(第一个L293d的两个启用引脚和其他L293d的两个启用引脚)直接连接到Wemos Digital引脚,而所有八个输入引脚(第一个L293d的四个引脚和其他L293d的四个)直接连接到Wemos Digital引脚。
步骤4:PCF8574-一个I/O端口扩展器
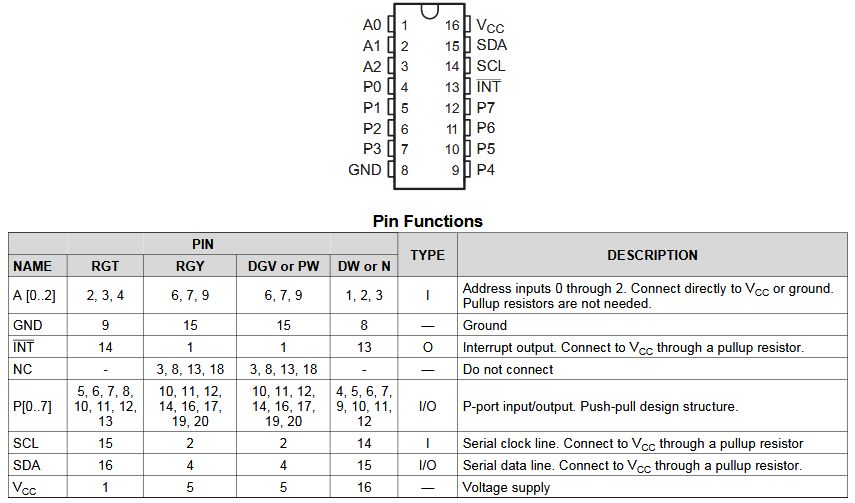
Wemos D1 Mini(例如ESP8266)缺少输入/输出引脚。我们可以使用I/O扩展器IC(例如PCF8574,这是一个8位I/O扩展器)来增加数字输入/输出引脚。
使用PCF8574A I/O扩展器的优点之一是它使用I2C总线仅需要两条数据线,它们是时钟(SCK)和数据(SDA)。因此,使用这两条线,您可以控制同一芯片的最多八个引脚。通过更改每个PCF8574的三个地址引脚,我们可以控制总共64个引脚。
用于两线双向总线(I2C)的8位输入/输出(I/O)扩展器设计用于2.5 V至6V VCC操作。 PCF8574器件通过I2C接口[串行时钟(SCL),串行数据(SDA)]为大多数微控制器系列提供通用的远程I/O扩展。
该器件具有8位功能准双向I/O端口(P0–P7),包括具有大电流驱动能力的锁存输出,可直接驱动LED。每个准双向I/O都可以用作输入或输出,而无需使用数据方向控制信号。上电时,I/O较高。
有关下面的PCF8574与两个L293d IC的连接图,请参见下面的“ PCF8574_With_L293d” pdf文件。
步骤5 :原理图

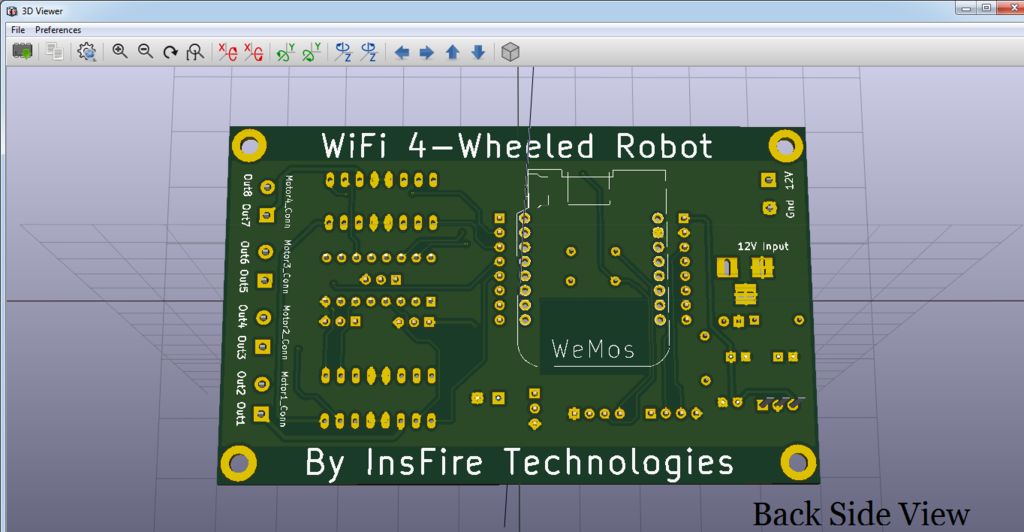
下载以下原理图pdf来设计自己的PCB或在点PCB板上实现。
步骤6:代码
连接到以下Wi-Fi接入点:-
//用户定义的网络凭据
const char * ssid =“ WiFi_Robot”;
const char * password =“ Automate @ 111”;
连接到上述访问点后,请在网络浏览器中转到以下链接:-
http ://192.168.4.1
您将收到以下消息:-
“您好,来自机器人!”
http://192.168.4.1/fw
这将导致机器人向前移动
http://192.168.4.1/bk
这将导致机器人向后移动
http://192.168.4.1/lt
这将导致机器人向左移动
http://192.168.4.1/rt
这将导致机器人向右移动
http://192.168.4.1/st
这将导致机器人停止
-
机器人
+关注
关注
206文章
27033浏览量
201395 -
wi-fi
+关注
关注
14文章
1976浏览量
122780
发布评论请先 登录
相关推荐

Wi-Fi的诞生与发展

Wi-Fi 7商用元年:更宽的路应跑更好的车
Wi-Fi HaLow和传统Wi-Fi的区别
康普携手Wi-Fi联盟,RUCKUS Wi-Fi 7系列接入点成Wi-Fi
Wi-Fi 6和Wi-Fi 5之间有哪些区别呢?
2024年将会是Wi-Fi 7元年
什么是Wi-Fi 6?什么是Wi-Fi 6E?什么是最适合我的应用的?

Wi-Fi 7:下一代标准
分析 丨2个新规实施,Wi-Fi 7增添变数






 工商网监
工商网监
评论