 木质三轴无人机的制作教程
木质三轴无人机的制作教程
第1步:设计
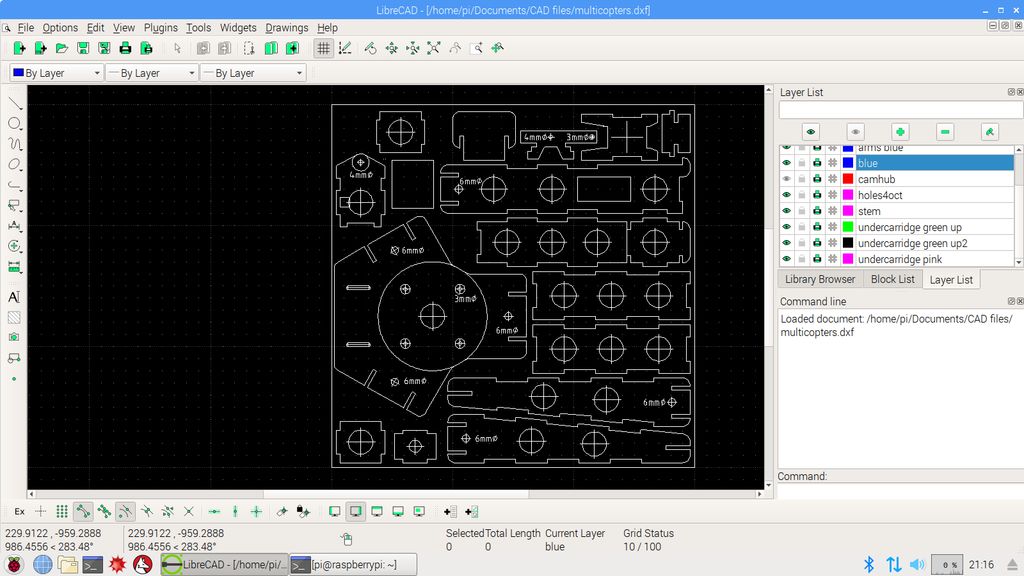

我对这个模型的结果非常满意。我总是对我的模型使用相同的方法,但这次我通过减少使用的材料更进了一步。
当您打印出计划时,确保计划以100%打印并且没有缩放是非常重要的。每根手臂长度应为200毫米。
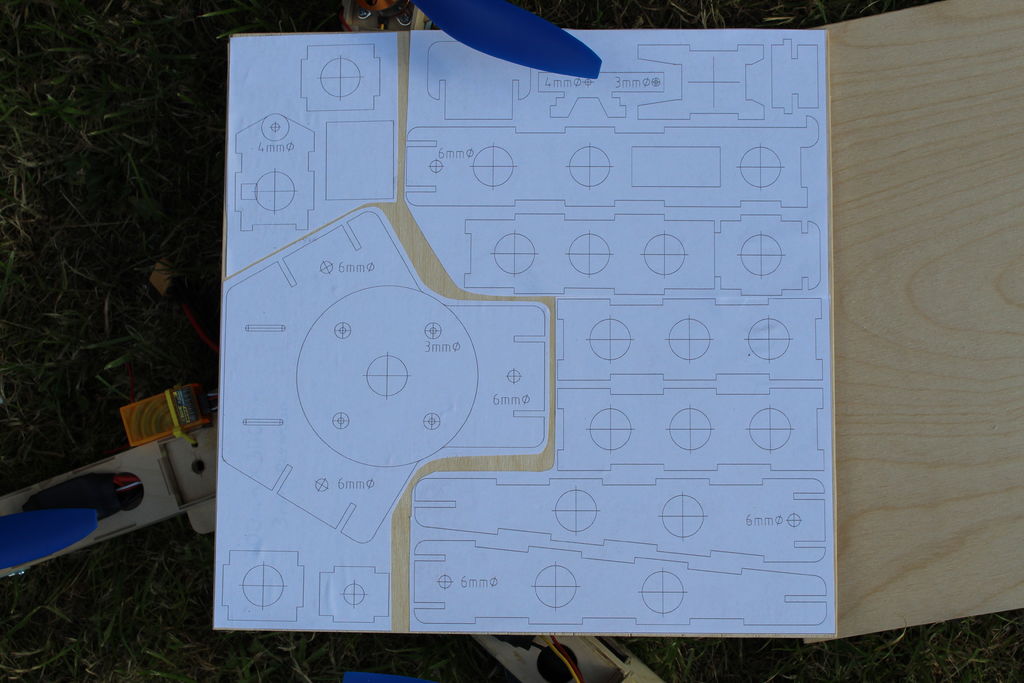
所以基本上一旦你打印出计划,你会发现整个模型都适合一块3毫米胶合板300毫米* 300毫米,你需要加倍每一位需要削减两次。这意味着你只需要一块300×600mm或1英尺×2的胶合板。
你需要用胶棒将图钉粘在木头上,然后小心地切掉所有的碎片。每次切出一点都要确保插槽尺寸正确并且相应的位合在一起。
设计经过仔细考虑,在不同的地方使用相同的位,例如两个固定的手臂明显相同,但手臂的顶部和底部也是如此,实际上顶部和底部是对称的,因此可以适合任何一种方式。完成这个模型的构建后,只有3个小位备用,所有这些位都与伺服臂相关联。
一旦切掉所有的位,就需要钻出所有的孔,并且一旦你完成了孔,你就可以剥离纸张了。 (这就是使用棒状胶水的美妙之处)
第2步:将这些位粘合在一起。


我花了一些时间在设计上,确保位可以安全地组合在一起。在开始将所有位粘合在一起之前,你应该首先测试构建手臂,以确保你能够将所有位插在一起。
我的首选是使用大猩猩胶。一开始它工作得很好,只需要2个小时即可完成。但是,如果您是大猩猩胶水的新手,请确保按照说明操作,因为您需要弄湿木材的一个表面并将胶水涂在另一个表面上。然后你必须在胶水凝固时将这些位夹在一起。另外,保持皮肤胶水非常重要,不论是戴手套还是使用涂抹器。
你可以使用PVA胶水,但是可能需要更长的时间来干燥,如果像我一样你不耐烦,那么等待胶水干燥就没有乐趣了!整个模型在周五晚上开始,并在周日午餐前飞行。
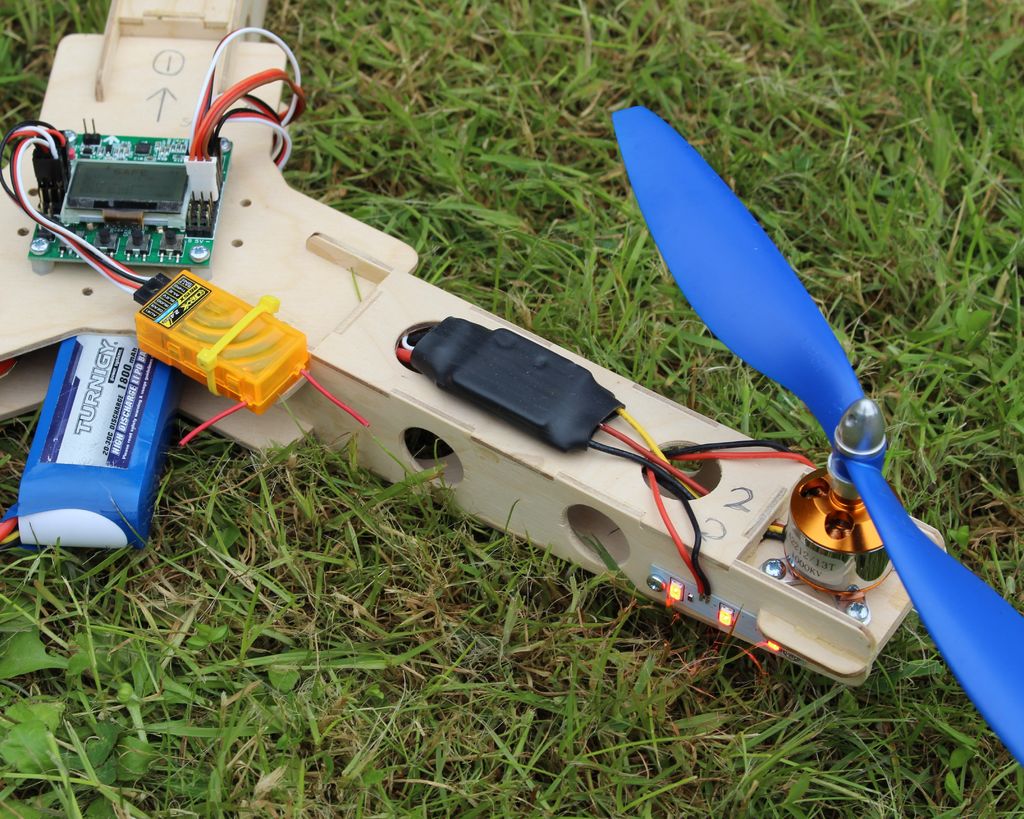
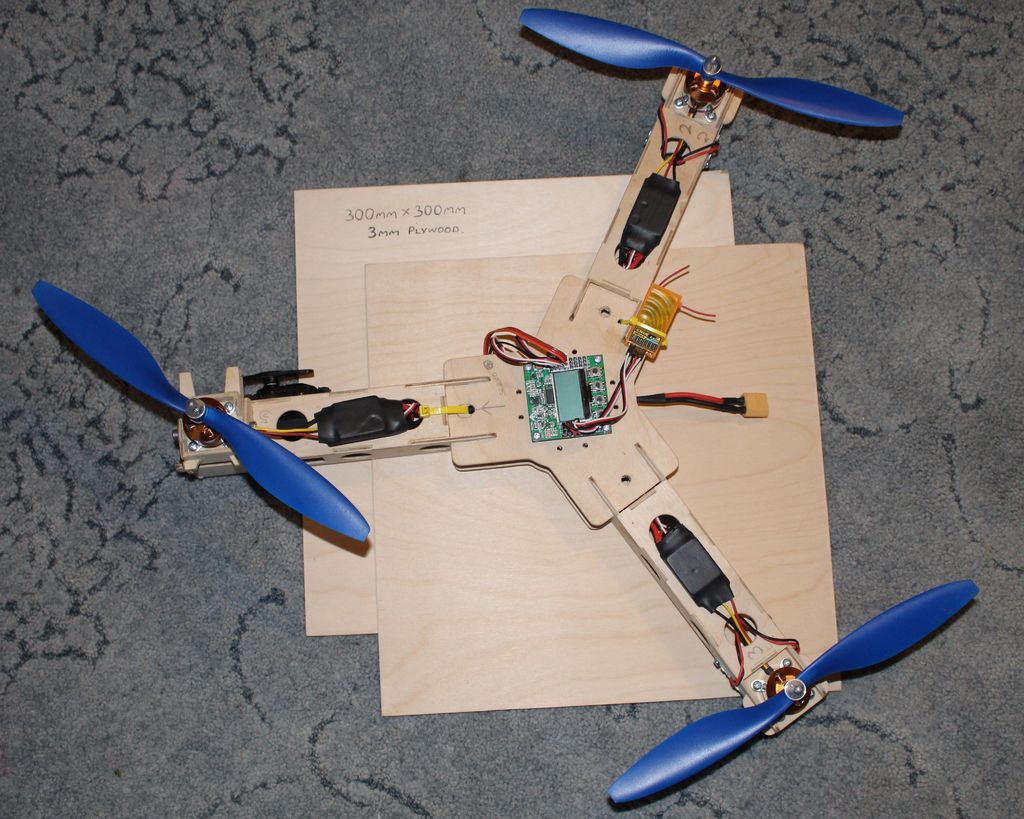
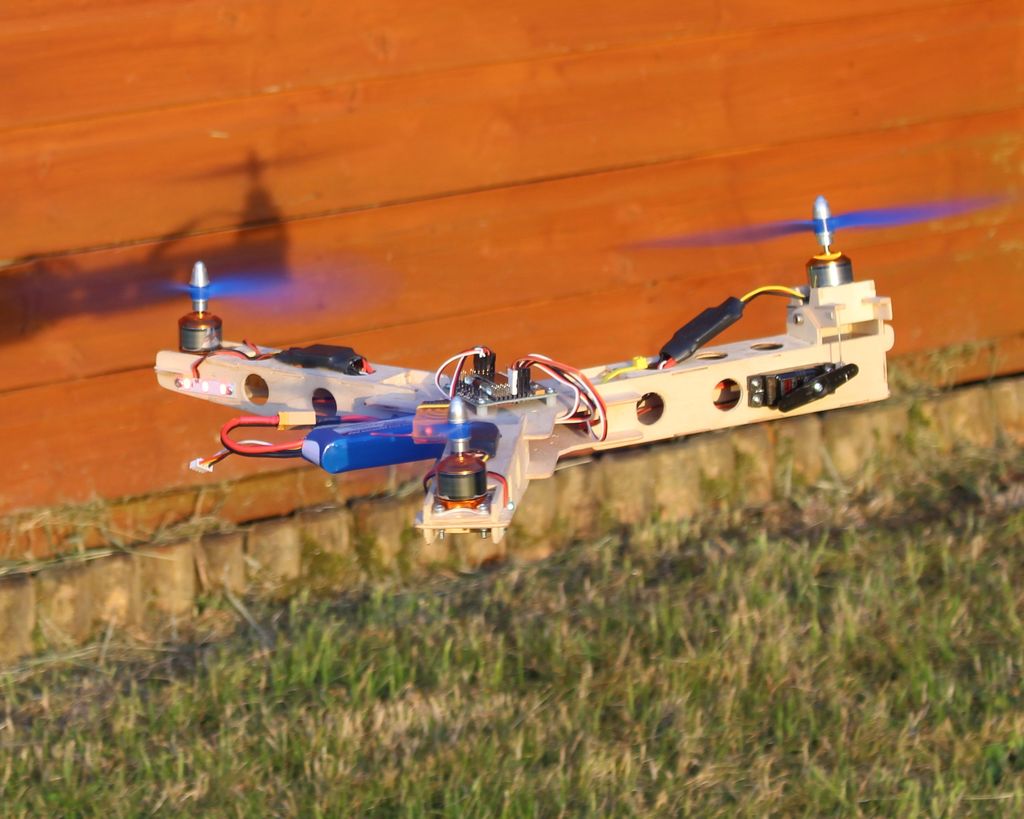
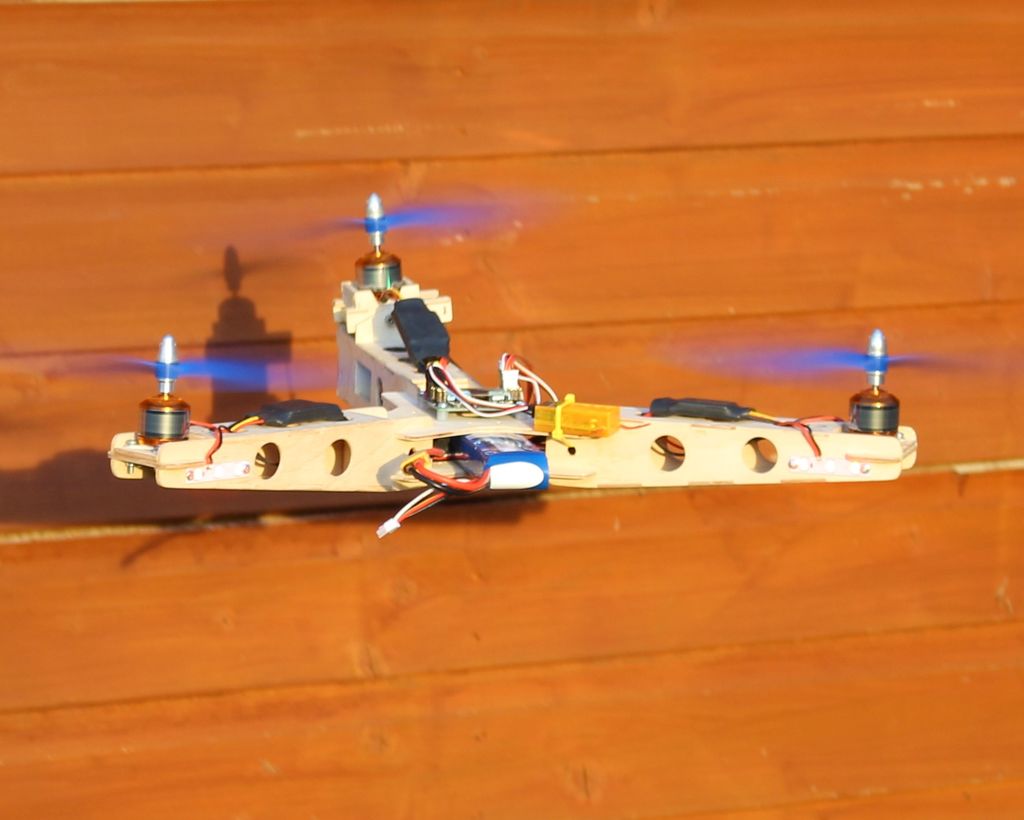
这个模型的速度真的令人印象深刻。一旦所有钻头都粘在一起,那么只需将手臂插入中心轮毂(但不要粘合),然后使用两个带有尼龙的M4 * 16mm螺钉添加偏航马达支架。
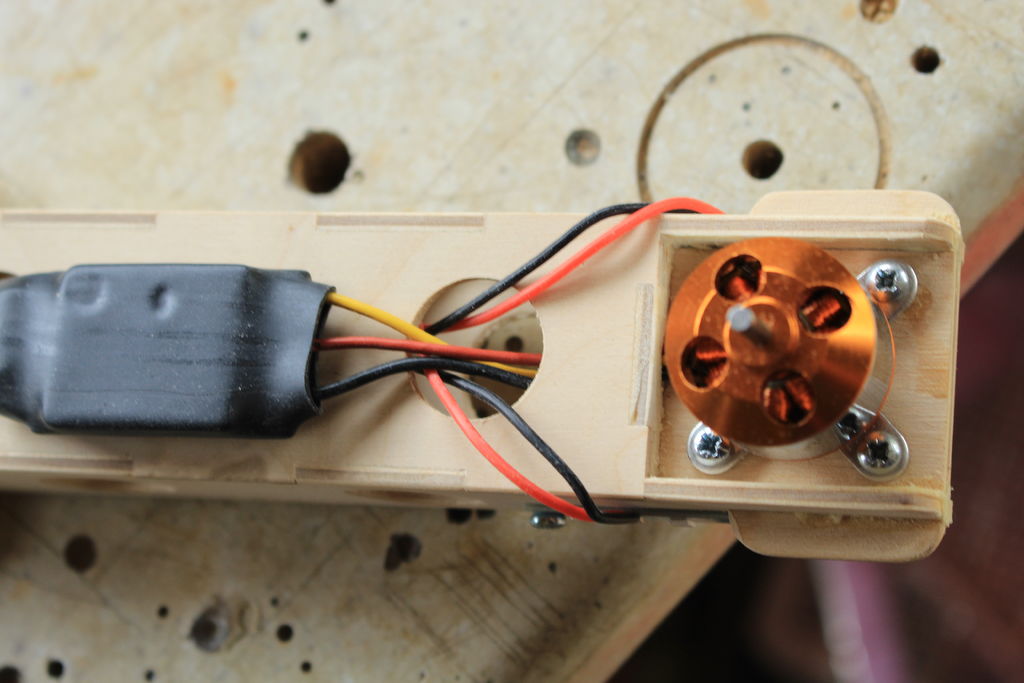
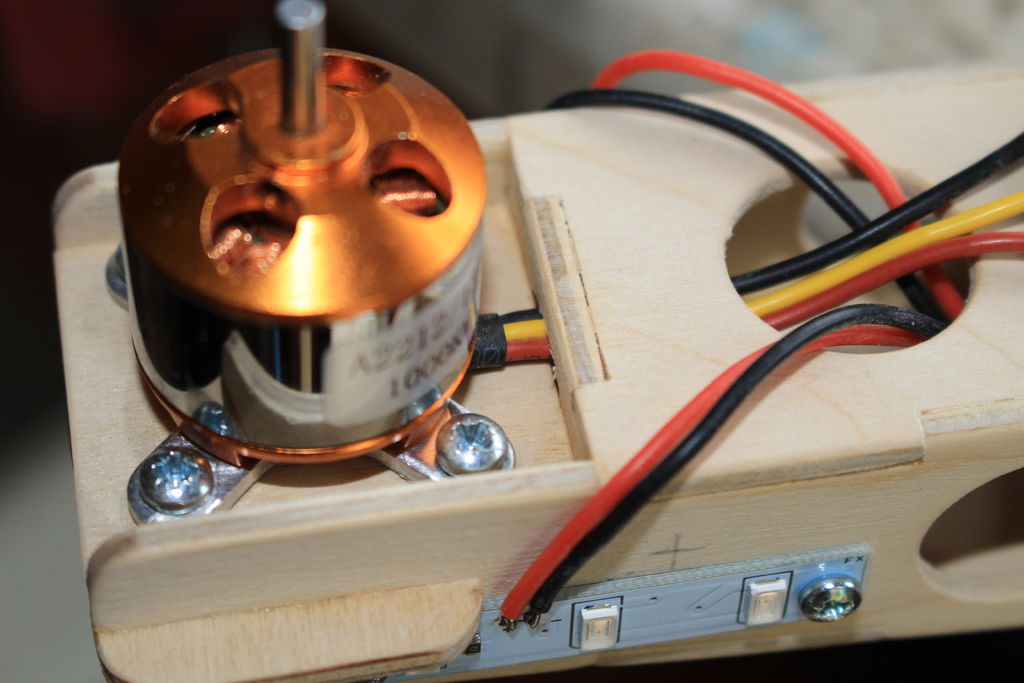
安装电机我使用了套件附带的电机安装座。为了将孔安装在正确的位置,我将马达安装座(未安装电机)并将安装座固定到位,钻出第一个孔。然后我将M3螺钉放入孔中并钻出相对的孔,再次将M3螺钉放入该孔中,然后钻出最后两个。通过这种方式,您可以在安装电机时正确排列所有孔。
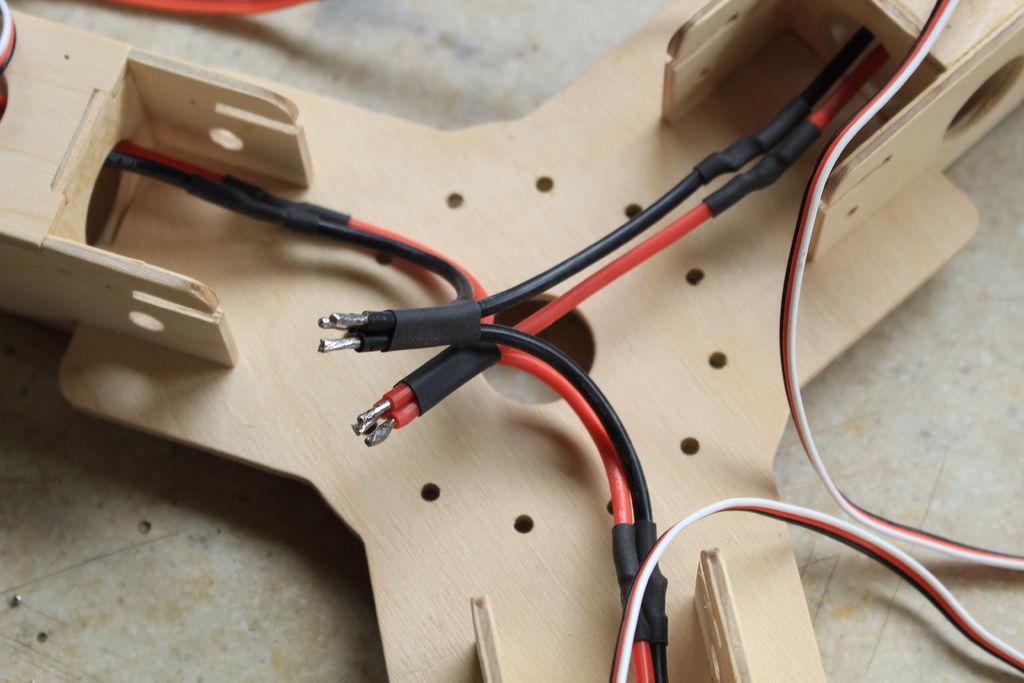
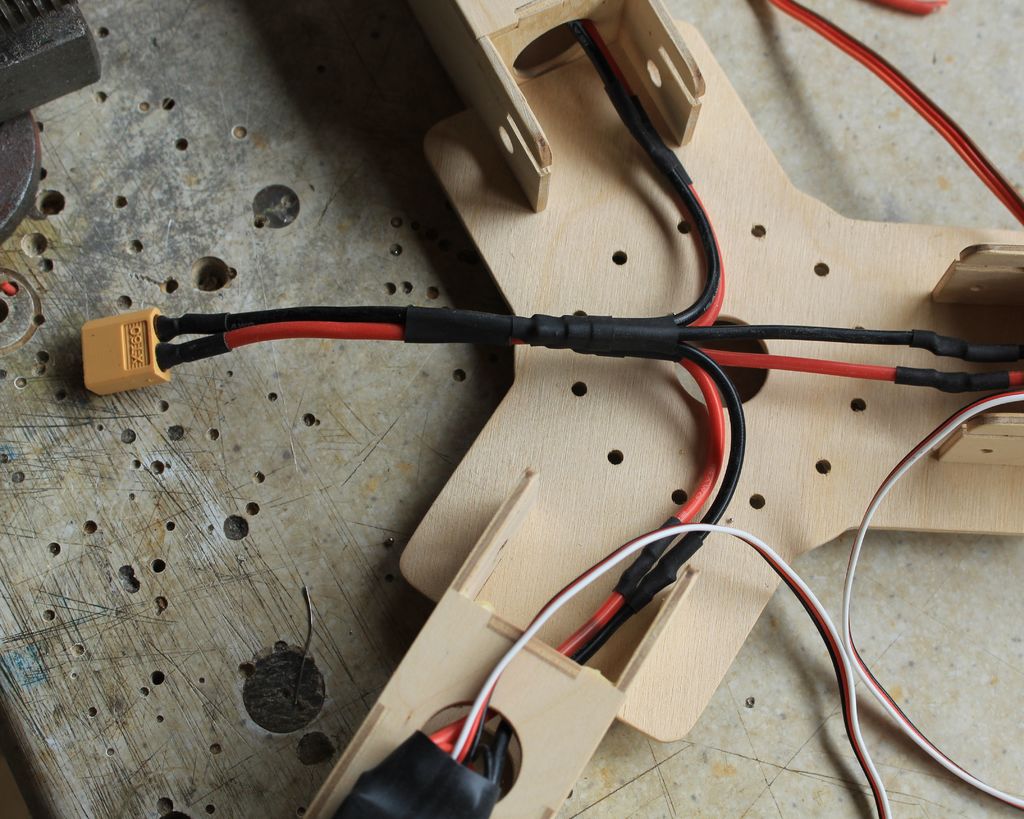
您可以在上图中看到我如何安装电机并将电机线穿过臂和从这个洞。这使得一个漂亮的清洁模型,并保持所有电线不碍事。然后将电机线直接焊接到ESC上,这样就可以摆脱通常从ESC到电机的3根导线和连接。在连接ESC的电源线上,我添加了4根额外的红色和黑色电线,就像电机电线一样,这些电线通过臂进给,并且都在中心部分之间的区域连接在一起。
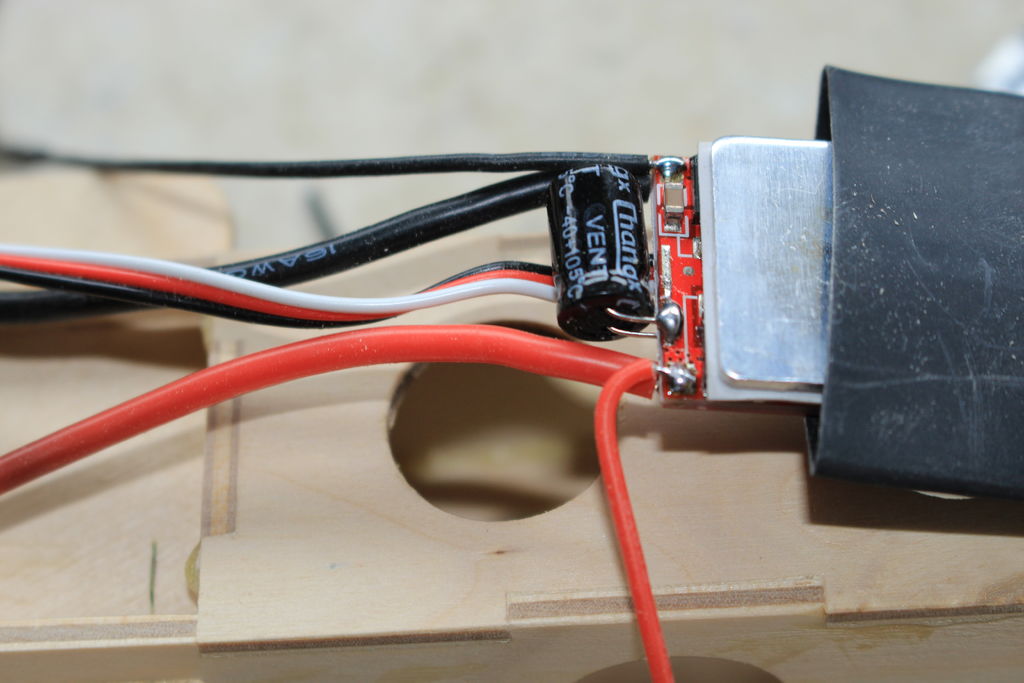
虽然我将电机线焊接到ESC上,但我也选择在灯上添加线路。如其中一张照片所示,它被焊接到主电源线另一侧的焊盘上。
步骤4:偏航伺服。


此设计使用了完整(普通)尺寸的伺服。我之所以尝试使用小型三轮飞行器(HJ-Y3),它使用的是迷你9克伺服,很快就意识到这是一个弱点。即使齿轮是金属的,它也不会阻止它们在最轻微的碰撞时剥离!该模型也是由玻璃纤维制成的,似乎很容易破碎。
所以我使用的伺服是蓝鸟伺服,它恰好是一个高速金属齿轮伺服,但我想你可以逃脱标准伺服。 BMS-631MG。
如图所示并在视频中说明伺服安装时电机侧面的喇叭,然后只是钢琴线与上方电机安装座的短链路。
我设计的电机座只有20度向上运动和20度向下,从我到目前为止所做的测试看来这似乎很多。我还认为限制马达安装座的运动有助于保护伺服系统。
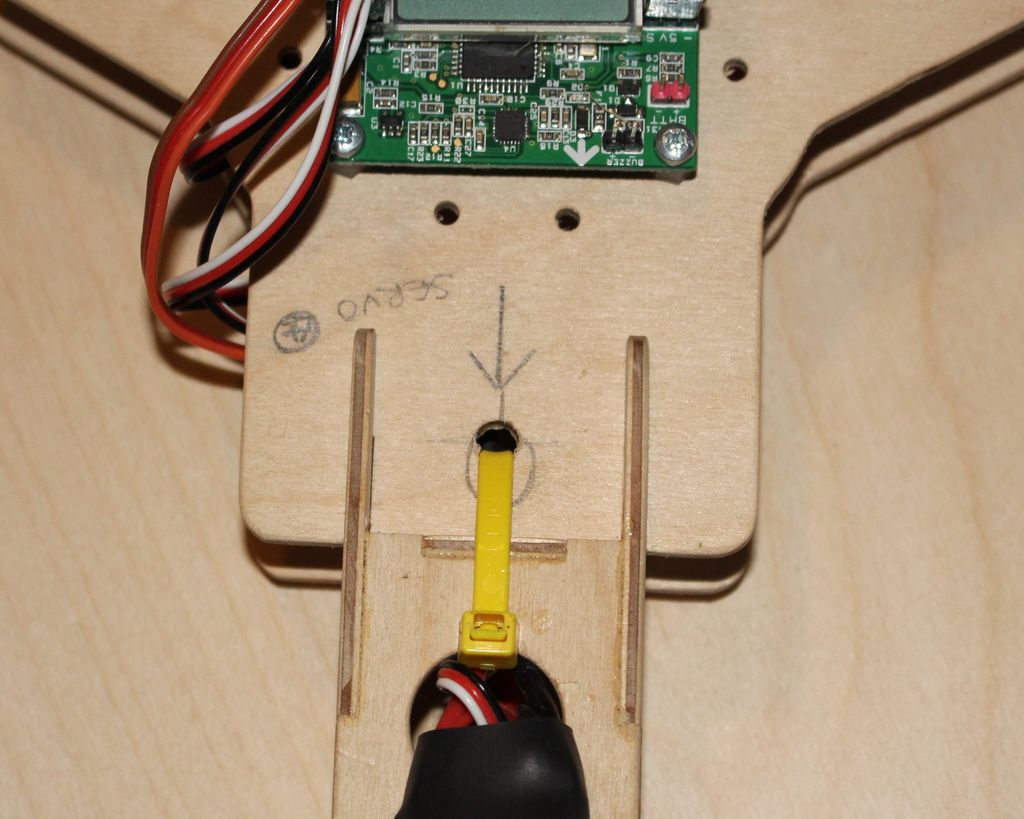
步骤5:KK飞行控制器和设置。
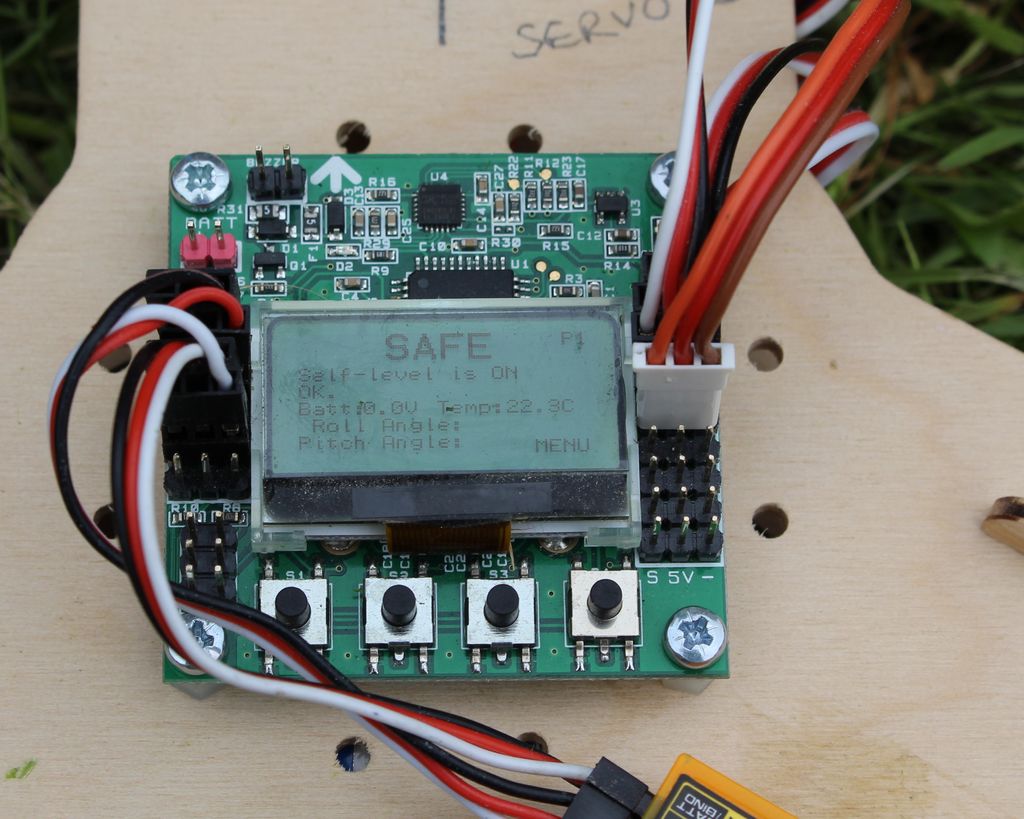

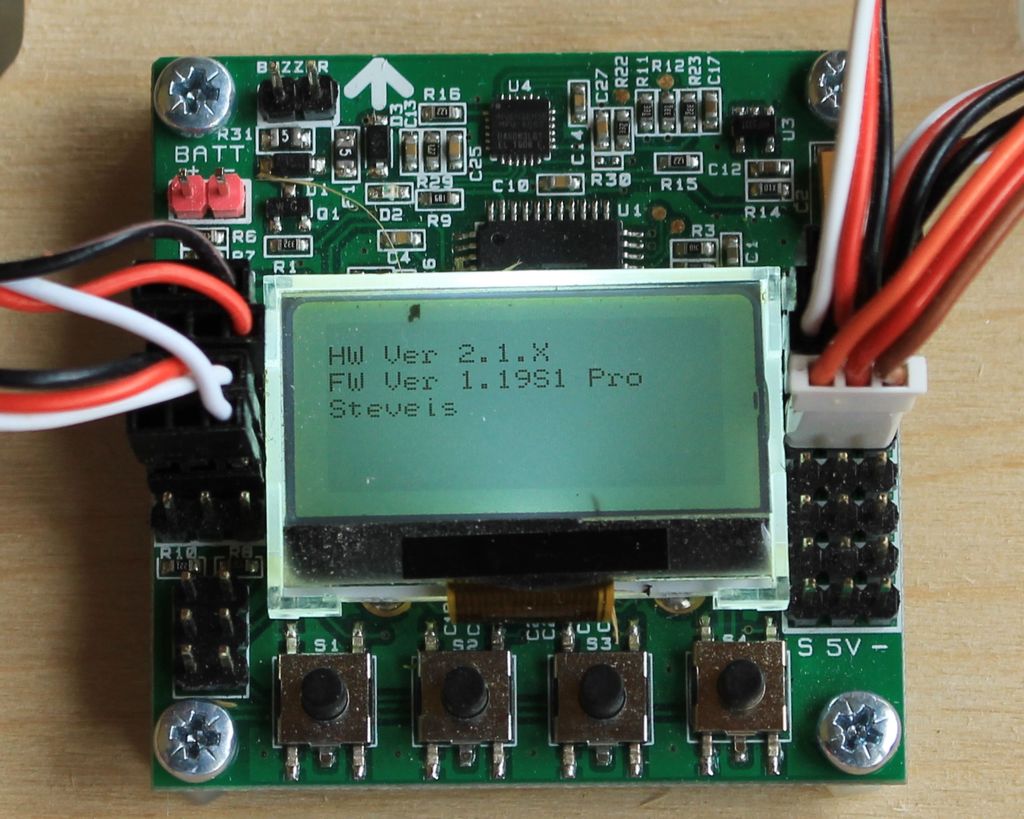
我在这个项目中使用过KK 2.1.5飞行控制板。我非常喜欢电路板的简洁性以及无需连接电脑或将蓝牙连接到手机/平板电脑即可在电路板上进行更改的事实。
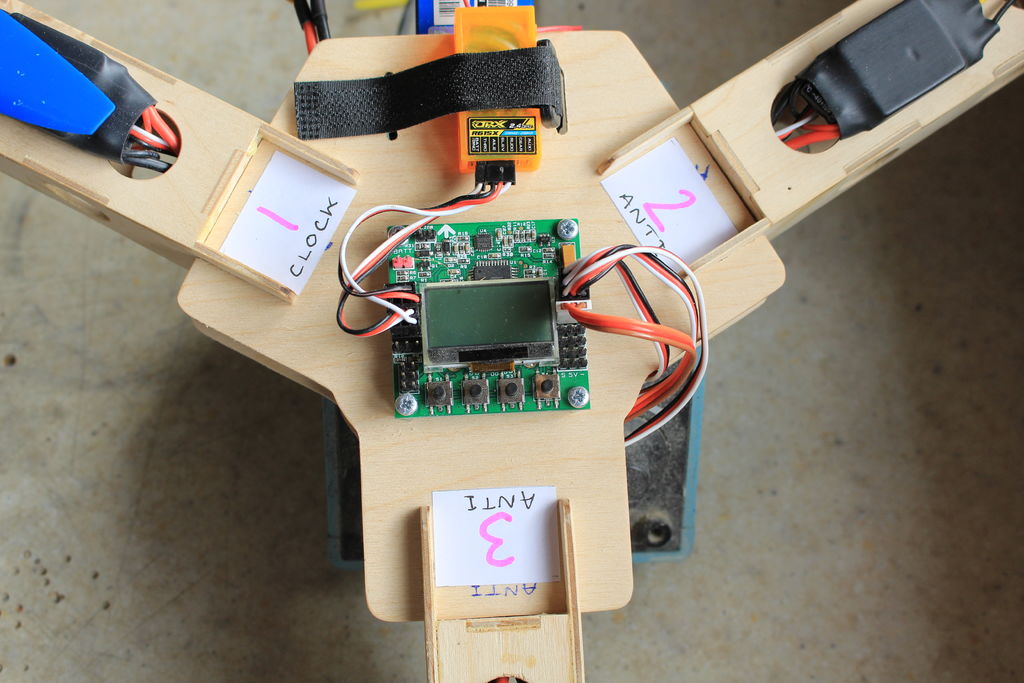
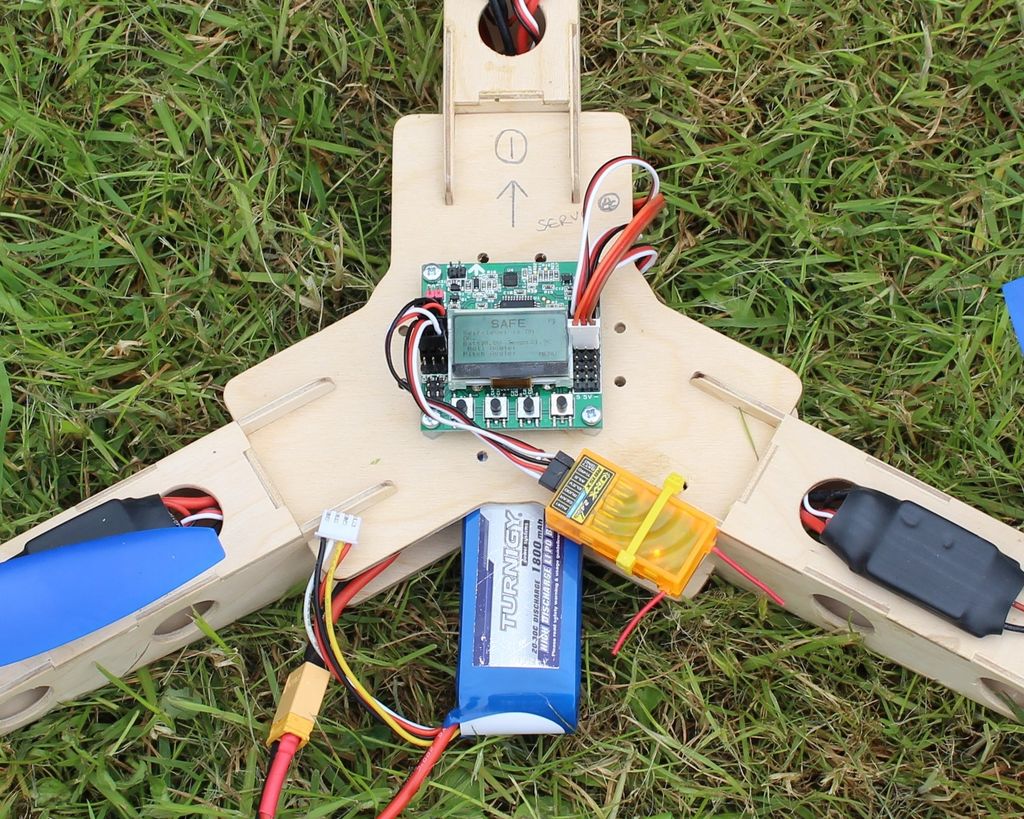
取决于您想要如何飞行型号取决于您如何安装飞行控制板。如果您希望将模型作为“Y”飞行,前面有两个电机,则电路板箭头应指向两个中间。但是,如果您希望笨拙(像我一样)并且希望飞行配置为颠倒的“Y”,则板箭头应面向前电机。它在SERVO ARM的位置很重要。就飞行控制器而言,伺服仅用于改变模型的偏航,无论它在何处,它总是会使模型旋转。
如果您正在飞行默认的Tri,那么KK将显示电机编号并告诉您电机方向。但是,只要你得到两个方向而最后一个方向相反,我认为这并不重要。但为清楚起见,电动机应为顺时针方向,应为3.而电动机2应为逆时针方向。不像我的! (但仍然有效)
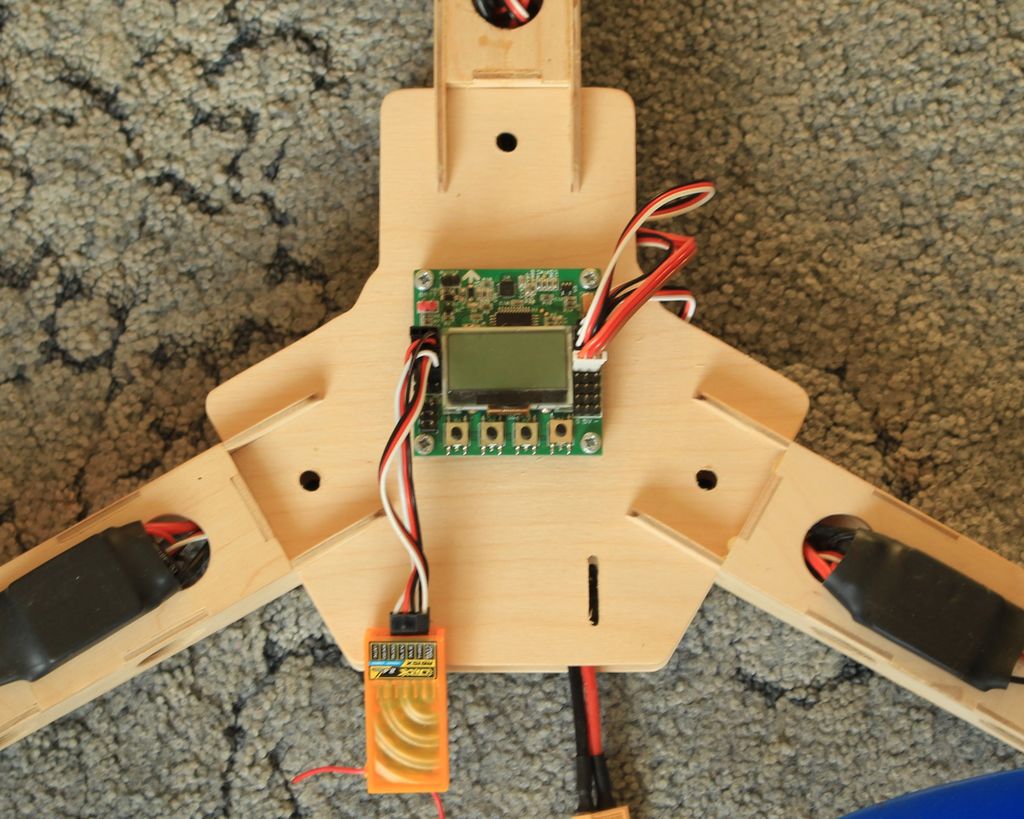
一旦连接了所有ESC和伺服(位置4),就可以连接电池并配置控制器。电机布局应该是Tricopter,伺服在4中。然后我检查模型如何在没有螺旋桨的情况下工作,用油门启动电机使模型绕一圈旋转并确认伺服器在相反方向移动以反对动作。在我的情况下,它没有朝着正确的方向移动,这意味着模型将失去控制。要纠正此问题,您需要进入混音编辑器并向下滚动到通道4(伺服)并将方向舵值更改为-100。当你处于此状态时,将自我级别设置更改为在模式页面中始终打开,最后让您在PI编辑器中将P增益调高到75.
步骤6:完成触及和改进。


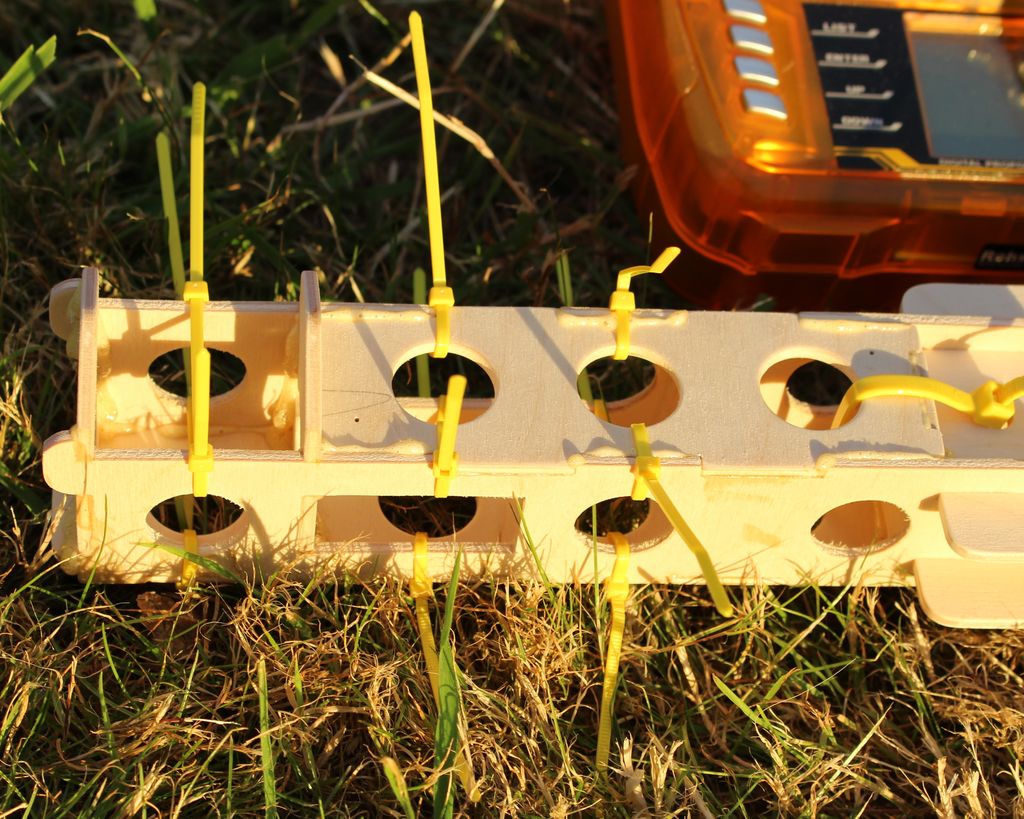
当我第一次尝试这个模型时,我在中央部分之间挤压电池,这工作正常但我决定改变设计以增加更好的位置。此外,电池需要偏离中心以抵消伺服的重量。
此外,我还在新的中央位上添加了孔,以便系带有兴趣将手臂固定到位。
-
无人机
+关注
关注
224文章
9884浏览量
174799
发布评论请先 登录
相关推荐
无人机与反无人机:高空中的智慧较量和“猫鼠游戏”|特信无人机反制
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程
知语云智能科技揭秘:无人机威胁如何破解?国家安全新防线!
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
无人机全景监测:空域管理的新革命
震撼发布!知语云智能科技引领革新,全景反制无人机系统破茧而出!
四旋翼无人机飞行原理【其利天下无人机方案开发】

\"【重磅推出】知语云智能科技:革新低空无人机反制系统,守护领空安全!
什么是无人机图传系统?无人机图传系统的构成





 工商网监
工商网监
评论