 如何用无人机播种
如何用无人机播种
第1步:获取材料
注意:
如果这是第一个你做的无人机,我们建议从较小和更安全的无人机开始,如木制,小型和开源无人机:flone intructable。 Dronecoria太强大了,不能成为你的第一架无人机!
在哪里建造/购买
配备两节电池和无线电控制器的完整无人机的成本低于2000美元。您应该寻找用于切割木材的激光切割服务,以及用于播种机构的3D打印服务。好的地方应该是FabLab和MakerSpaces。
我们在这里链接到不同的在线商店,如Banggood, Hobbyking ,或 T-Motor,在哪里购买组件,大部分也可以在 eBay 上找到它们。请记住,取决于您所在的国家/地区,您可以找到更近或更便宜的供应商。
请检查遥测正确的法律频率 电台对于你的国家,通常美国为900 Mhz,欧洲为433Mhz。
我们的16000 mAh电池允许飞机在没有有效载荷的情况下飞行41分钟,但由于操作的性质,飞行到一个区域,尽快送种子(需要10分钟左右),并且还建议使用更小更轻的电池。
机身
胶合板250 x 122 x 0.5 cm $ 28
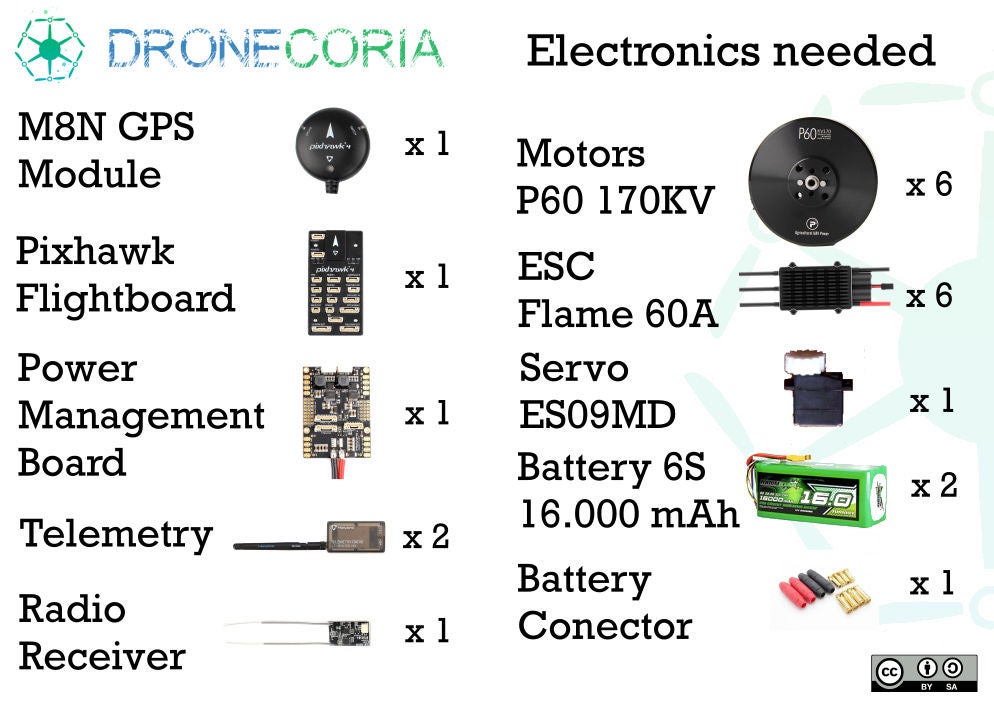
电机: T-Motor P60 170KV 6 x $ 97.11
ESC: Flame 60A 6 x $ 90
螺旋桨: T- MOTOR聚合物折叠22“螺旋桨MF2211 3 x 55美元
电池: Turnigy MultiStar 6S 16000mAh 12C LiPo电池2 x $ 142
飞行控制器: HolyBro Pixhawk 4& M8N GPS模块组合1 x 225.54
遥测:用于PIXHawk的Holybro 500mW收发器无线遥测设备套装1 x $ 46.36
伺服 (种子控制):Emax ES09MD 1 x $ 9.65
各种
电池连接器AS150防-spark 1 x $ 6.79
电机接头MT60 6 x $ 1.77
电机螺丝M4x20(替代型)3 x $ 2.42
热缩管绝缘1 x $ 4.11
黑色和红色电缆12 AWG 1x $ 6.83
黑色和红色电缆10 AWG 1米x $ 5.61
电池带20x500mm 1 x $ 10.72
粘性魔术贴$ 1.
无线电发射器iRangeX iRX-IR8M 2.4G 8CH多协议带PPM S.BUS接收器 - 模式2 1 x 55 $
总计:1961,75美元
可能的海关费用,税费或运费不包括在此预算中。
第2步:削减和机体合奏



在这个s中tep我们将按照构建和组装无人机框架的过程。
这个框架是用胶合板制作的,就像历史悠久的无线电控制飞机一样,这也意味着,可以用胶水修复,如果发生事故和刹车,可以堆肥。
胶合板是一种非常好的材料,使我们能够制造出轻便的无人机并且成本低廉。重量为1.8千克,可能需要几百美元而不是数千美元。
数字化制作让我们轻松复制,并与 分享设计
在视频和附带的说明中,您将看到安装框架的过程。
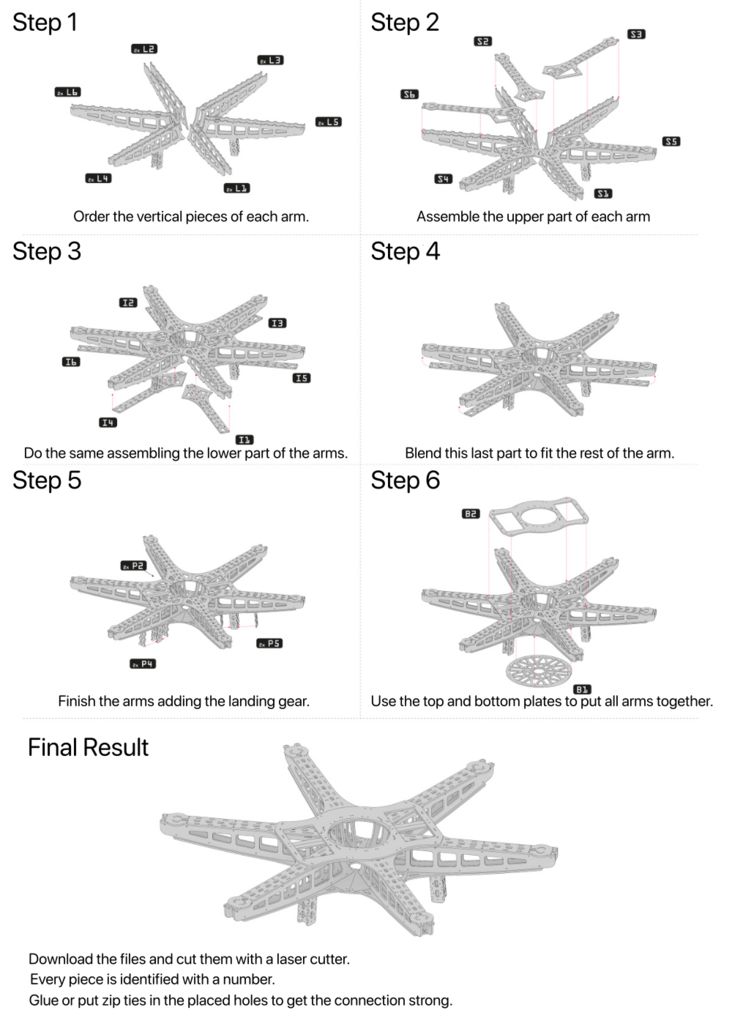
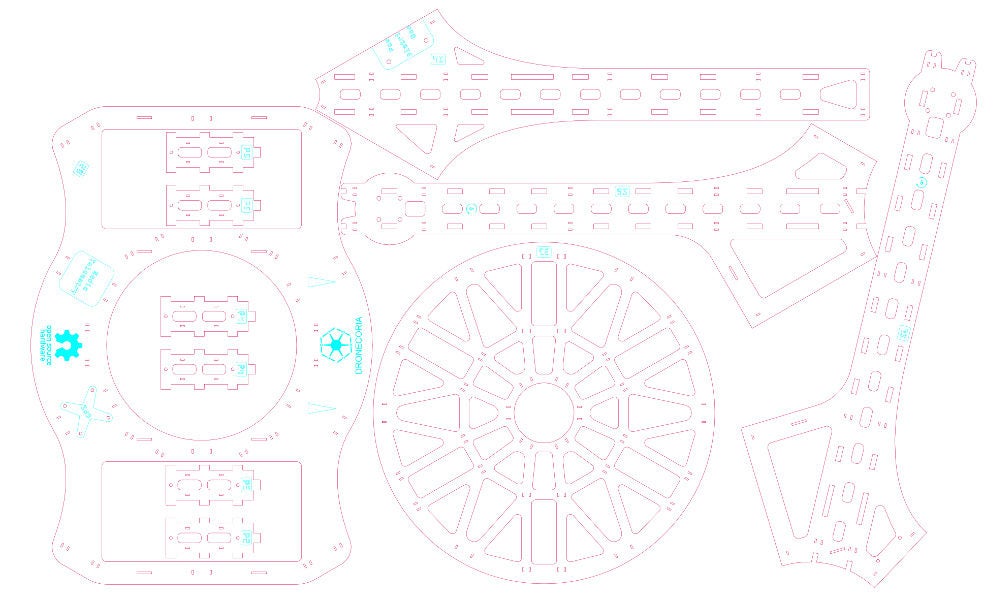
首先,您应该下载文件并找到一个带有激光切割机的地方来切割它们。一旦完成,这是主要的组装步骤:
您需要使用碎片,每个手臂都由数字标识。要开始构建手臂,请订购每只手臂的部件。
开始组装每个手臂的上半部分。胶水或使用拉链以获得强大的连接。
对手臂的下半部分做同样的事情。
将最后一部分混合以适应手臂的其余部分。
完成放置起落架的手臂。
最后,使用顶板和底板将所有手臂放在一起。
就是这样!
在下一步中,您将学习如何安装3D打印部件以丢弃种子,我们在那里等你!
步骤3:3D打印和整合种子分配器
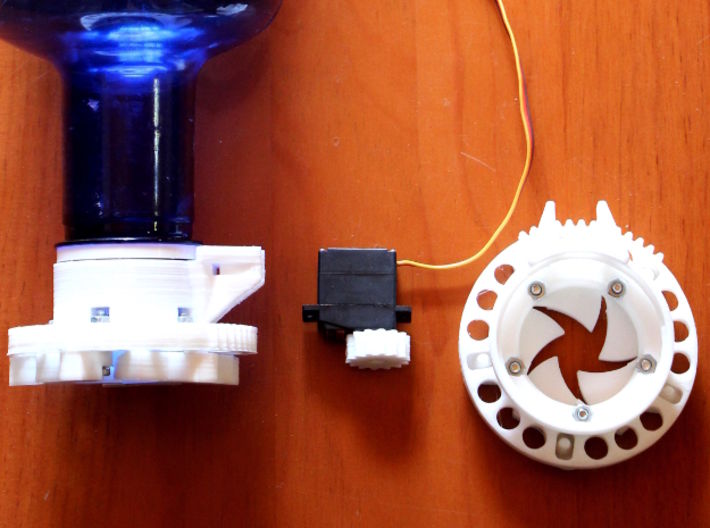



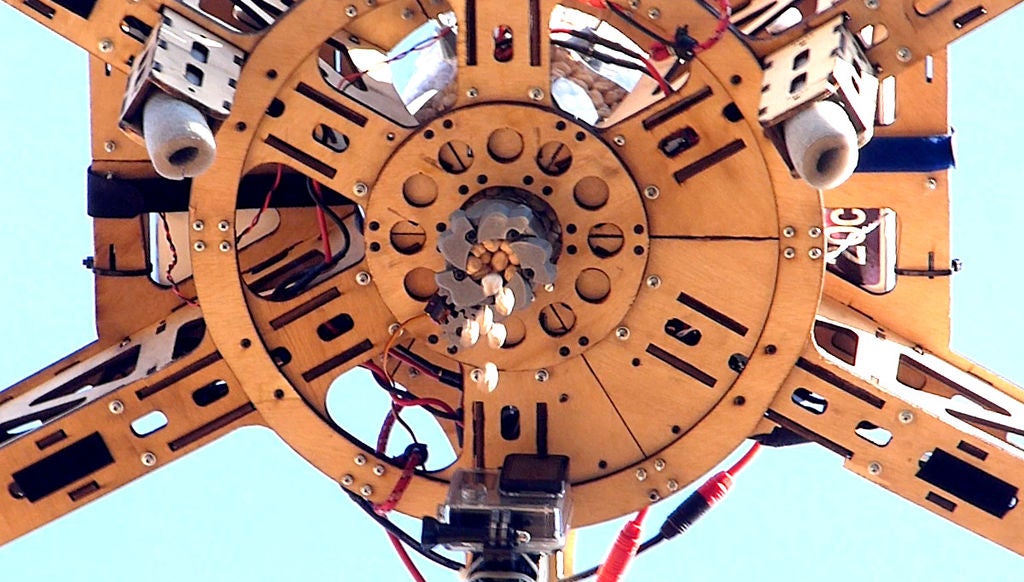
我们设计了一个 3D打印种子 - 释放系统,可以拧到任何PVC水瓶,如水龙头,使用塑料瓶作为种子容器。
瓶子可以用作低重量 - 低成本,Nendo Dango种子球的接收者,作为无人机的有效载荷。 释放机制位于瓶颈,伺服电机控制开口直径,允许自动打开和控制,播种率
这是您需要的材料:
一个瓶颈很大的塑料瓶。
3D打印
拉链。
五个M3x16mm螺丝和螺母,
螺丝刀。
伺服。
连接伺服的东西,如飞行控制器,无线电接收器或伺服测试仪。
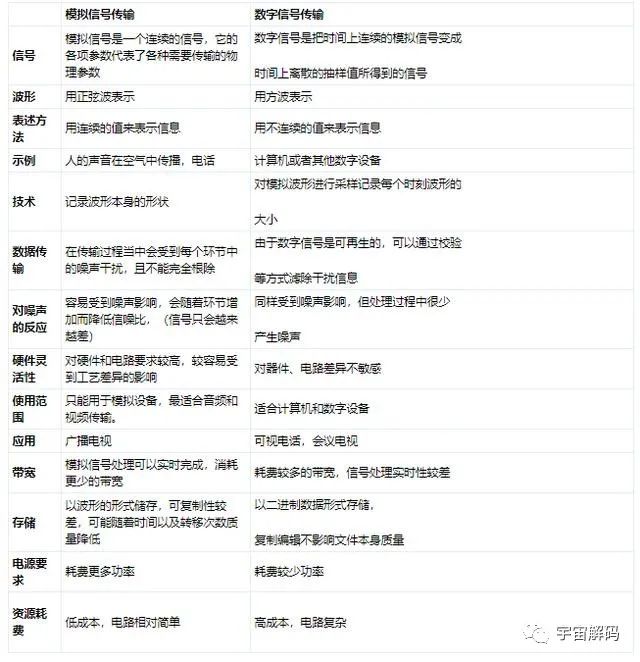
对于飞行器我们推荐使用数字伺服,因为数字电路可以过滤噪音,减少电池电量消耗,延长飞行时间,不产生任何可能影响飞行控制器的电子噪音。
我们推荐EMAX ES09MD伺服,质量/价格平衡,并包含金属齿轮。
您可以在线订购Shapeways中的零件,也可以自行下载和打印零件。
装配非常简单:
只需将环放在螺钉上即可。
将每个螺钉逐个拧紧,将小块连接到主体上,将螺母放在末端。
放置伺服器在他的位置,用拉链系带固定。建议使用伺服附带的螺丝,以便更牢固地固定。
将齿轮安装到伺服轴上。 (在视频中粘贴,但它不再是必要的。
测试它:将伺服连接到伺服测试仪,并丢弃一些种子:)
请随意查看视频,详细了解组装过程!
第4步:电子设备
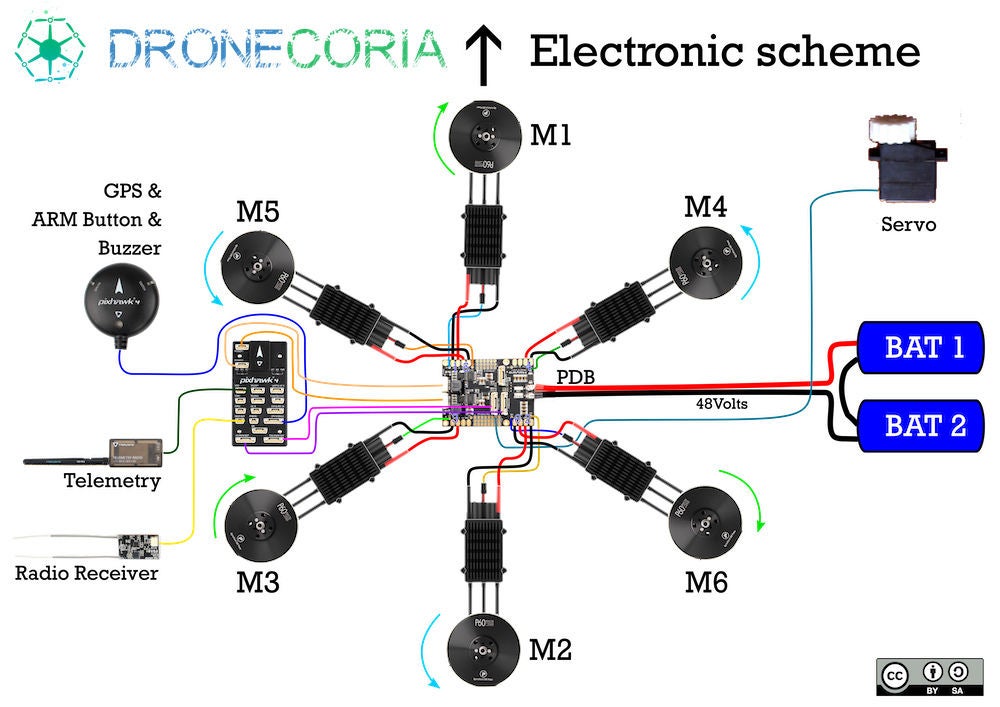






一旦框架和播种机构组装好,就可以进行电子部件。
警告!
正确焊接,连接不良可能会造成灾难性后果,例如飞机完全松动或发生事故。
使用大量焊料,因为有些电线会支持高电流。
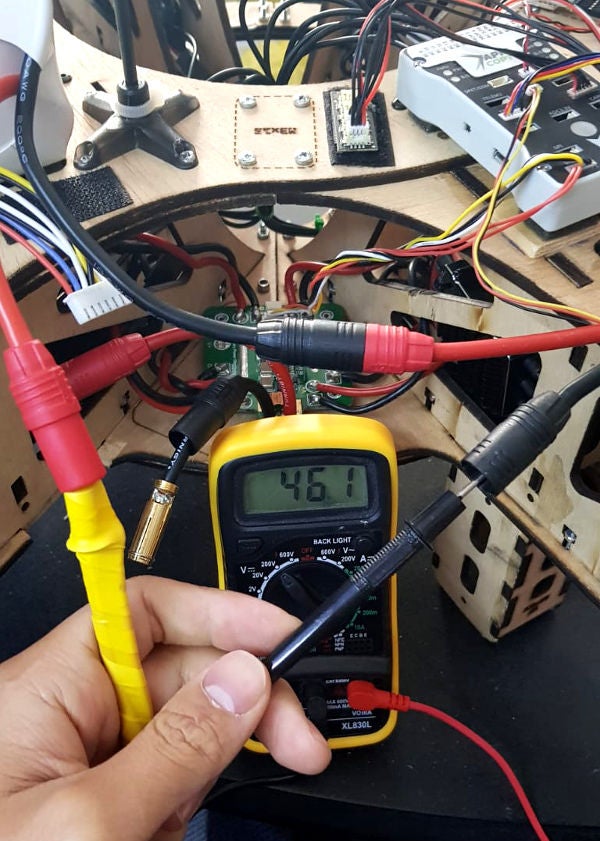
只有在完成所有安全检查后才能连接电池。您应该检查(使用测试仪)导线之间没有短路。
永远不要放置螺旋桨,直到一切配置完好。放置螺旋桨总是最后一步。
对于这个过程的这一部分,你应该拥有所有电子元件:
6电机P60 179KV。
6 ESC Flame 60A。
2 LiPo电池6S。
1 FlightBoard Pixhawk 4
1 GPS模块。
2无线电遥测收发器。
1无线电接收器。
2个AS150电池连接器。
6 MT60三线连接器。
电池带。
1米黑色电缆12 AWG
1米红色电缆12 AWG。
1米黑色电缆10 AWG
1米红色电缆10 AWG。
24个电机螺丝。 M4 x 16。
一些工具如:
Solder&烙铁。
热缩管绝缘
胶带。
魔术贴
焊接的第三只手。
双面胶带。
让我们走吧!
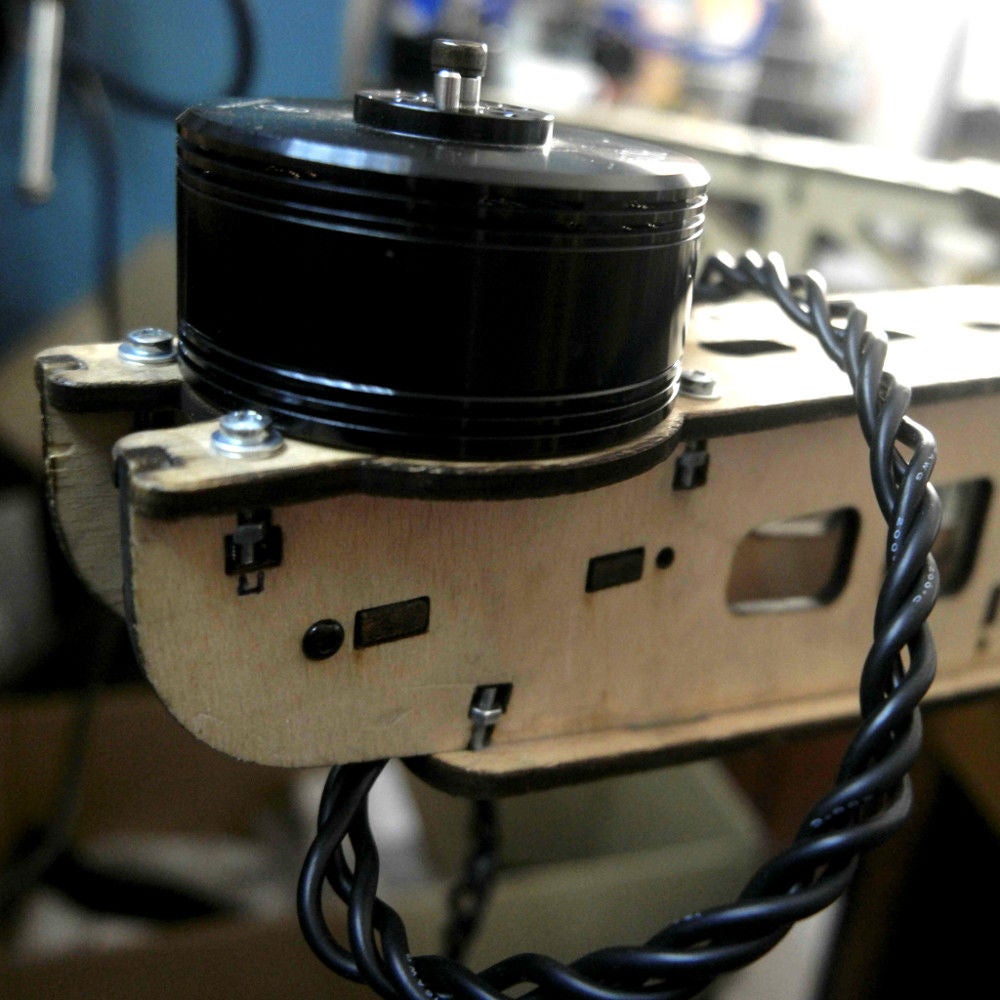
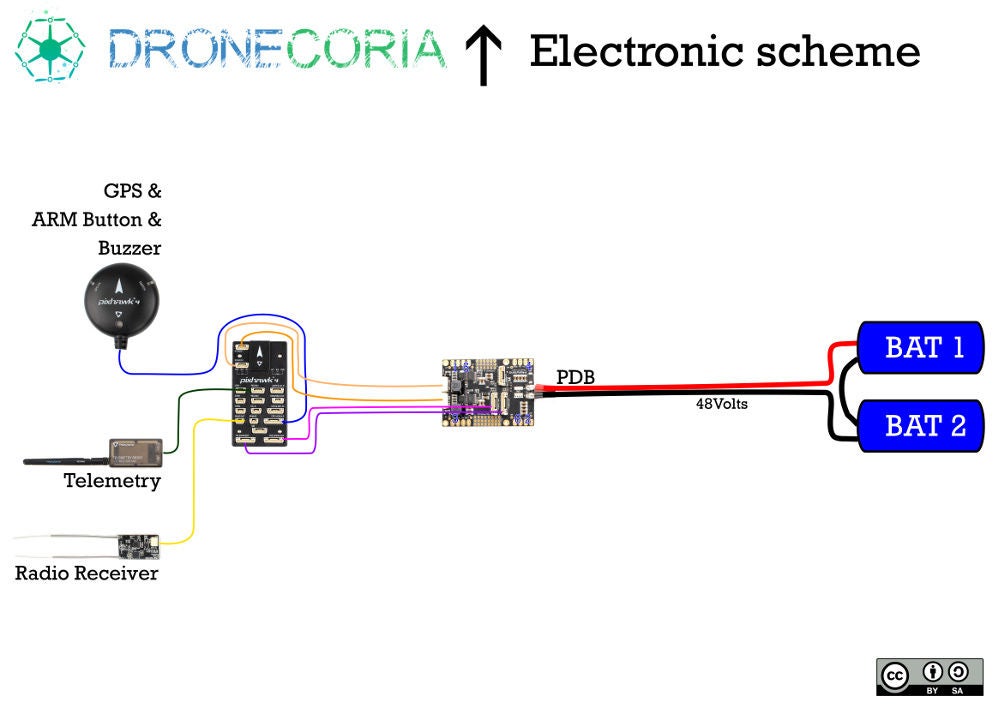
电机和ESC
每台电机都有三根电缆,以避免与其他电子设备的电磁干扰,是个不错的辫子电线,为了减少这种干扰,这个连接的长度也应尽可能短。
这三根电机的电缆应连接到ESC的三根电缆上,顺序为这根导线取决于电机的最终方向,你应该更换两根导线来改变方向。检查每个电机正确方向的方案。
要进行最终布线,您可以将MT60与三个连接器一起使用:将电缆从电机焊接到公连接器,将三条电线从ESC连接到母连接器。
重复这对于每对Motor-ESC来说是6次。
现在可以使用M4螺丝将电机拧到每个臂上。将ESC放置在框架内,并将每个电机与相应的ESC连接。
飞行控制器
使用双面振动隔离带放置飞行为了将电路板与振动隔离,使用正确的磁带非常重要。检查飞行板的箭头是否与框架箭头的方向相同。
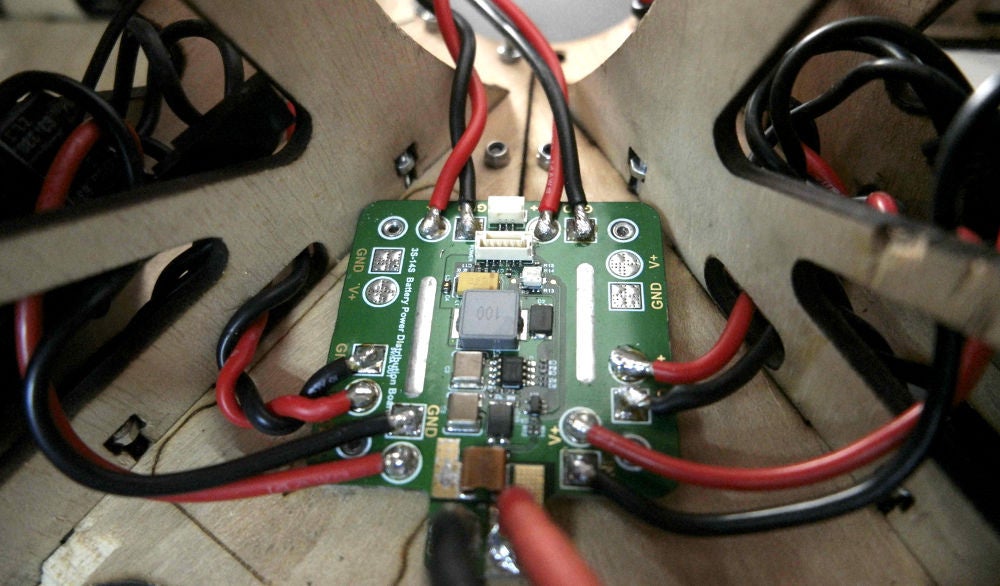
配电板。
PDB是无人机的电动炉灶,为每个元素提供动力。所有ESC都连接在那里以获得电池的电压。该PDB集成了BEC,为所有需要5V的元件供电,如飞行控制器和电子元件。还要测量飞机的耗电量,以便了解剩余的电池。
将电池连接器焊接到PDB 。
我们使用的P60电机设计工作在12S(44伏),因为我们的电池是6S,它们应串联连接以增加每个电压。每个电池有22.2伏特,如果我们串联连接电池,我们将获得44.4伏。
最简单的电池连接方式是使用AS150连接器,这样我们就可以直接将一个电池连接到其他以及每个电池对PDB的正负极。
如果您的电池有不同的连接器,您可以轻松地将连接器更换为AntiSpark AS150或使用适配器。
开始将10 AWG电线焊接到PDB,使用足够的电缆从PDB的位置到达电池。然后完成AS150连接器的焊接。请注意正确的极性。
焊接ESC到PDB。
电池的能量直接进入PDB,然后从PDB电源进入六个不同的ESC。开始将PDB放置在他们设计的位置并拧紧或使用维可牢尼龙搭扣固定到框架上。
使用12 AWG电线将每个ESC的正极和负极焊接到PDB,此PDB可以最多可支持8个电机,但我们只使用六个电机的连接,所以通过ESC(正负)焊接ESC到PDB。
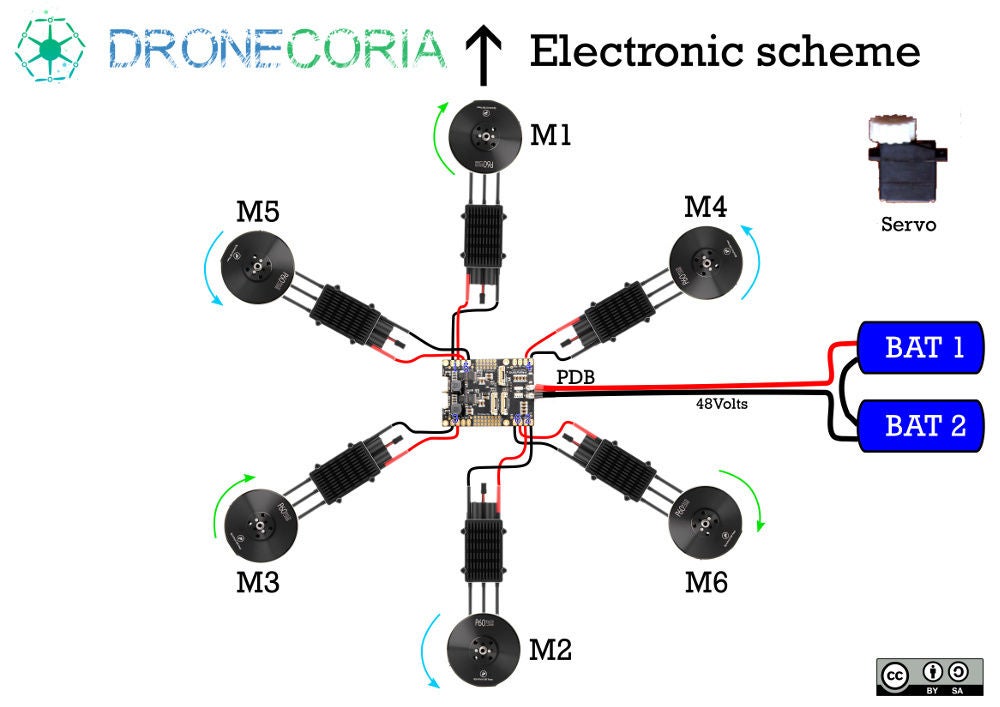
每个ESC配有一个三线连接器,你会选择该连接器的白色信号线将其焊接到PDB中的指定位置。
最后,将带有设计端口的PDB连接到飞行板,
GPS& Arm Button&蜂鸣器
此GPS集成了一个按钮,用于布防飞机和蜂鸣器触发警报或发出不同信号。
将GPS底座放在标记处定位并将其拧到框架上,注意在没有振动或移动的情况下建立牢固的附件,然后使用指定的电缆将其连接到滑板。
遥测
通常,您需要一对设备,一个用于飞机,另一个用于地面站。将一个遥测收发器放在所需位置,并使用尼龙搭扣或双面胶带固定在其位置。使用特定端口将其连接到飞行板。
无线电接收器
将无线电接收器放在设计的位置,用尼龙搭扣或双面固定然后将胶带放在尽可能远的地方,并用胶带将它们安全地固定在框架上。如您在方案中所见,将接收器连接到飞行板。
第5步:软件配置
提示:
我们使这个Instructable尽可能完整,并提供了让飞行控制器准备好飞行所需的基本指令。对于完整配置,您可以随时查阅 Ardupilot / PixHawk 项目的官方文档,以防不清楚或固件更新到新版本。
要执行此步骤,您应该连接互联网以下载并安装所需的软件和固件。
作为地面站,要在基于arducopter的车辆中配置和执行飞行计划,您可以使用APM Planner 2或QGroundControl,两者都适用于所有平台,Linux,Windows和OSX。 (即使在Android中也是QGroundControl)
因此,第一步将下载并安装您选择的地面站到您的计算机。
根据您的操作系统,您可能需要安装额外的驱动程序才能连接到主板。
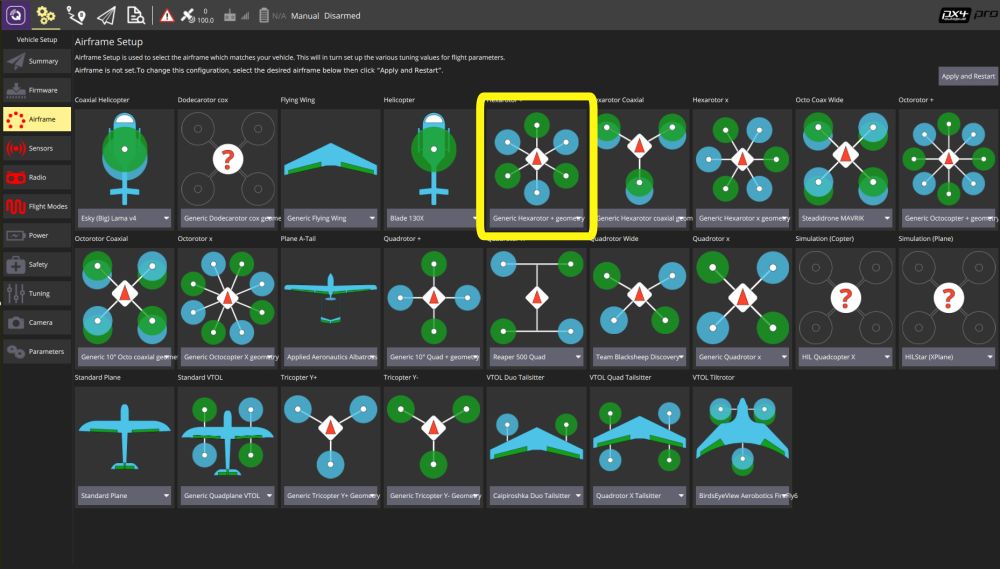
安装完成后,通过USB线将飞行控制器连接到计算机,选择安装固件,作为机身,您应该选择带+配置的六轴飞行器无人机,这会将最后一个固件下载到您的计算机并上传到无人机。在上传的同时不要中断此过程或断开电缆。
安装固件后,您可以连接无人机,并进行飞机配置,这种配置应该只进行一次或每次升级新固件时。由于是一架大型飞机,最好先配置无线遥控无线连接,以便在没有有线电缆的情况下轻松移动无人机。
无线电遥测连接。
将USB收音机连接到电脑,然后使用电池打开无人机电源。
然后,将电池连接到无人机,然后点击地面电台连接,根据您的操作系统,默认情况下可以显示不同的端口,通常端口为AUTO,应该建立稳固的连接。
如果没有,请检查您使用的是正确的端口,以及此端口的正确速度。
ESC校准。
为了配置ESC,请使用最小和最大节流值,应执行ESC校准。最简单的方法是通过Mission Planer,单击ESC Calibration并按照屏幕上的步骤操作。如果您有疑问,可以在官方文档中查看ESC校准部分。
校准加速度计。
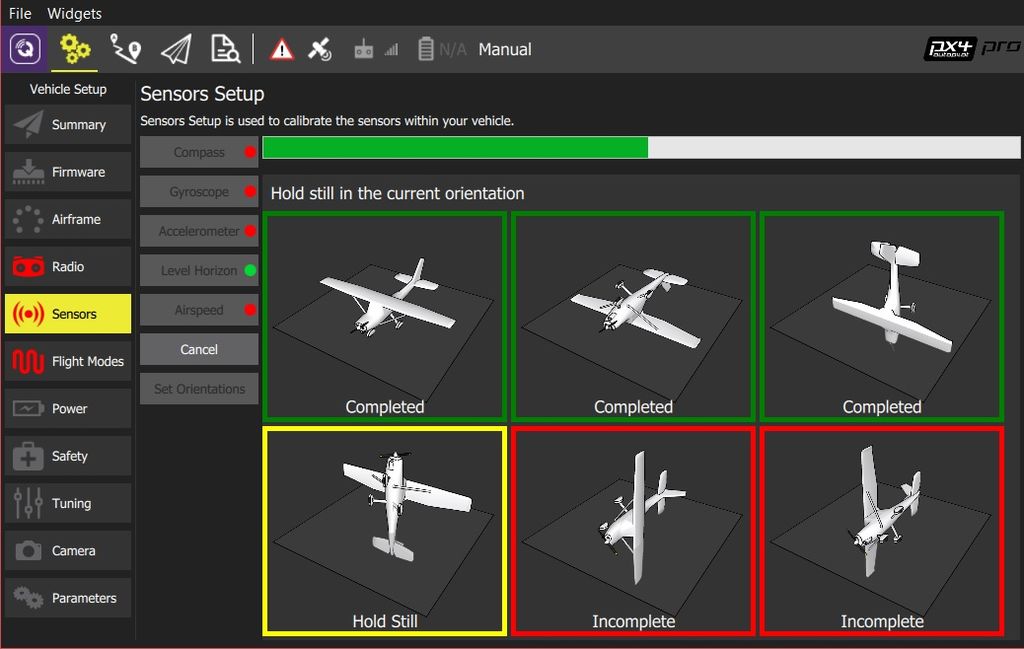
要校准加速度计,您需要一个平面,然后你应该点击Calibrate Accelerometer按钮并按照屏幕上的说明,他们会要求你把无人机放在不同的位置,每次按下按钮,位置应该是水平的,在左侧,在右侧,机头向上和机头向下。
校准磁力计。
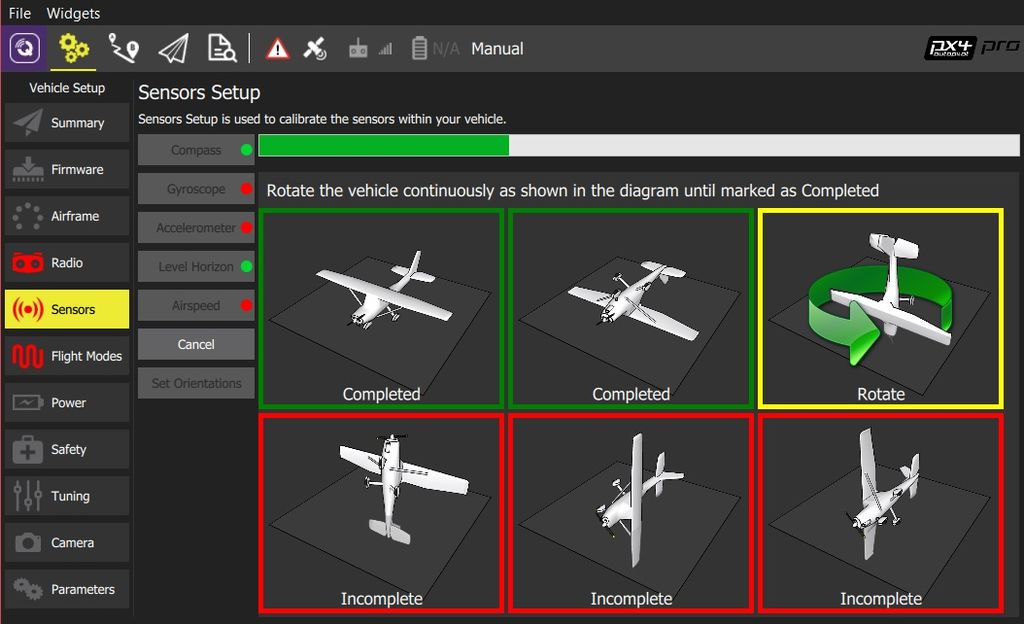
校准磁力计,按下按钮校准磁力计后,你应该将整架飞机移动360度以进行全面校准,屏幕将在此过程中为你提供帮助,并在完成后提醒你。
配对无线电接收器。
按照无线电控制器的说明绑定发射器和接收器。连接完成后,您将看到信号到达飞行控制器。
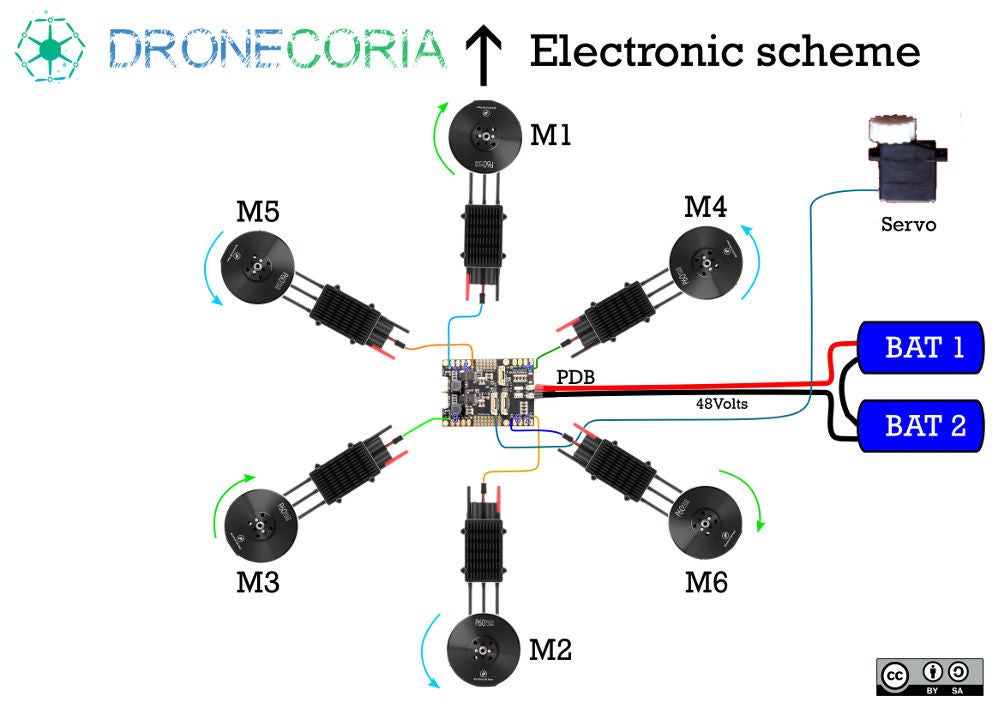
配置伺服器用于种子释放
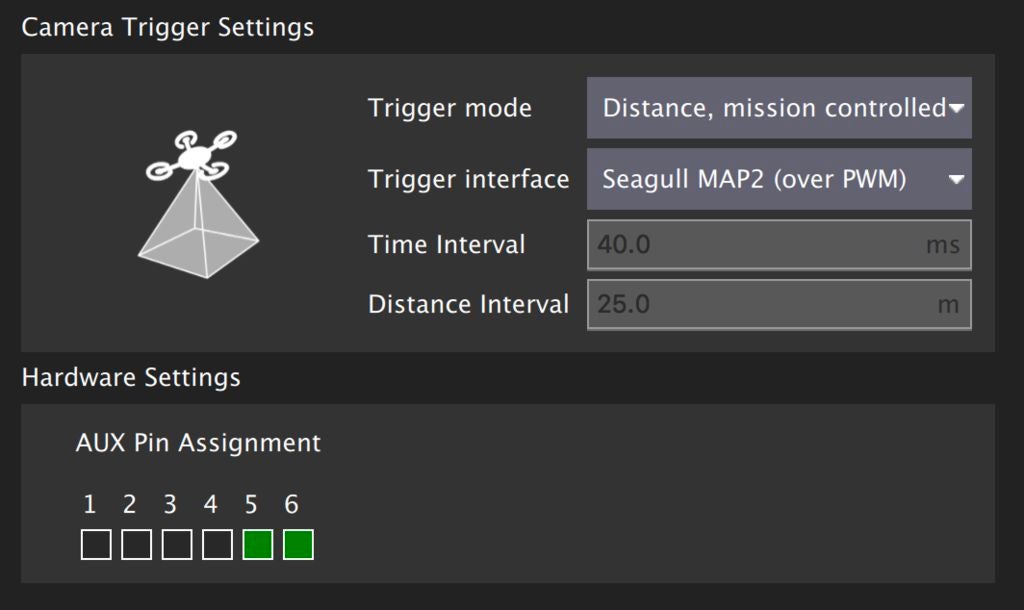
种子释放系统,用于飞行控制器,可以配置为相机,但不是拍照,丢种子:)
相机配置在触发模式下,支持不同的模式,只需选择为你的使命做得更好:
就像可以启用和禁用的基本间隔计一样工作。自动打开和关闭。
持续打开间隔计。无人机总是掉落种子。也许没那么有用,因为我们会在起飞时丢失一些种子。
根据距离触发。在手动飞行中将有用的是在地面上以特定频率丢弃种子,并且具有飞机速度的独立性。每次超过设定的水平距离时,系统都会打开门。
在任务模式下飞行调查时自动触发。用于规划从地面站丢弃种子的地方。
我们的框架适用于标准配置,因此无需进行特定配置。
步骤6:飞行并执行重新造林项目!


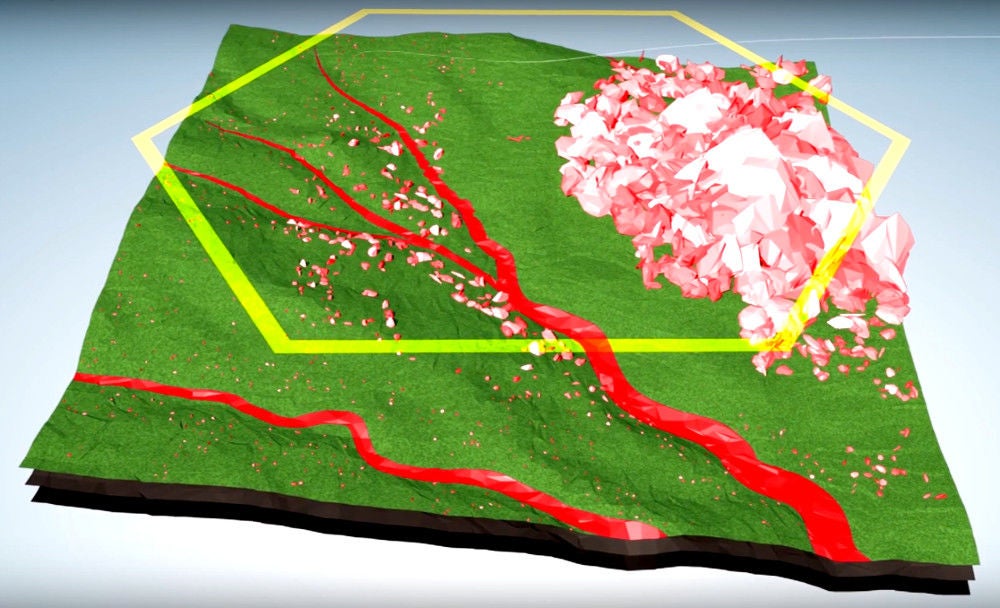


映射区域。
发生火灾或恢复退化区域后,第一步是执行损坏评估和记录当前状态。对于这项任务,无人机是一种基本工具,因为它们忠实地记录了土地的状况。为了执行这些任务,我们可以使用传统的无人机或捕获近红外线的相机,这些相机可以让我们看到植物的光合作用。
反射的红外线越多,植物就越健康。根据受影响的地形数量,我们可以使用多旋翼飞行器,每个飞行的地图容量大约《15》公顷,或选择固定机翼,可以映射到 200公顷在一次飞行中。选择的决议取决于我们想要观察的内容。要进行第一次评估,每个像素的分辨率为2到5厘米就足够了。
对于进一步的评估,当想要检查一个区域播种的种子的演变时,建议采用分辨率约为1厘米/像素的采样来观察生长。
23米的高度飞行将达到1厘米/像素, 70米的飞行将获得3厘米/像素的分辨率。
要制作地形的正射影像和数字模型,我们可以使用免费工具,如PrecissionMapper或OpenDroneMap,也就是自由软件。
完成正射影像后,请将其上传至开放空中地图,与其他人分享土地状况。
对该地区进行分析和分类
当我们重建正射影像时,这个图像(通常是geoTIFF格式)包含每个像素的地理坐标,因此图像中任何可识别的对象都将其2D,纬度和经度坐标与真实相关联。世界。
理想情况下,要了解领土,我们还应该处理3D数据并分析其高程特征,目的是找到理想的播种地点。
表面分类和分割
要重新造林的区域,物种的密度和类型将由生物学家,生态学家,林业工程师或修复专业人员确定,也可由法律或政治问题。
作为近似值,我们可以指出每公顷50,000粒种子,这将是每平方米5粒种子。要播种的该表面将被限定在先前映射的区域内。一旦确定了可重新造林的潜在区域,第一个必要的分类将区分真实区域与播种区域,以及不分区。
您应该确定为非播种区:
基础设施:道路,建筑,道路。
水:河流,湖泊,洪水泛滥的地区。
非肥沃的表面:岩石区域或大石块。
倾斜的土地:,坡度大于35%。
因此,第一步是将领土划分为进行播种的区域。
我们可以播种这些区域,产生植被覆盖,避免侵蚀,并尽快开始播种恢复土壤。
播种无人机
一旦我们将这些多边形构建在哪里播种,就可以完全填充表面有了种子,我们应该知道可以打开播种无人机的播种宽度路径,以及建立的飞行高度,以便对该地区进行完整的巡视,并在这条已知宽度的路径之间进行分离。
速度还将决定每平方米的种子数量,但我们将尽量使速度最大化,最大限度地缩短飞行时间,并在最短的时间内每公顷进行播种操作。假设我们以20公里/小时的速度飞行,这将是每秒约5米,如果我们的路径宽度为10米,一秒钟将覆盖50平方米的表面,所以我们应该每秒扔250颗种子来覆盖目标每平方米增加5粒种子。
我们希望你能有很好的航班恢复生态系统。
我们需要你来对抗野火。
如果你到了这里,你手中有一个非常强大的工具,一只能够在8分钟内重新造林一公顷的无人机。但这种权力是一项重大责任,使用 ONLY NATIVE SEEDS 不会对生态系统造成任何干扰。
如果你想合作,有问题需要解决,或者你有改善这个项目的好主意,我们是在wikifactory网站上组织的,所以请使用这个平台来发展项目。
再次感谢帮助我们打造一个更环保的星球。
Dronecoria团队。
本手册由:
LotAmorós(Aeracoop)
Weiwei Cheng Chen (PicAirDrone)
Salva Serrano (Ootro Studio)
第7步:奖金追踪:为自己的种子涂抹自己的种子


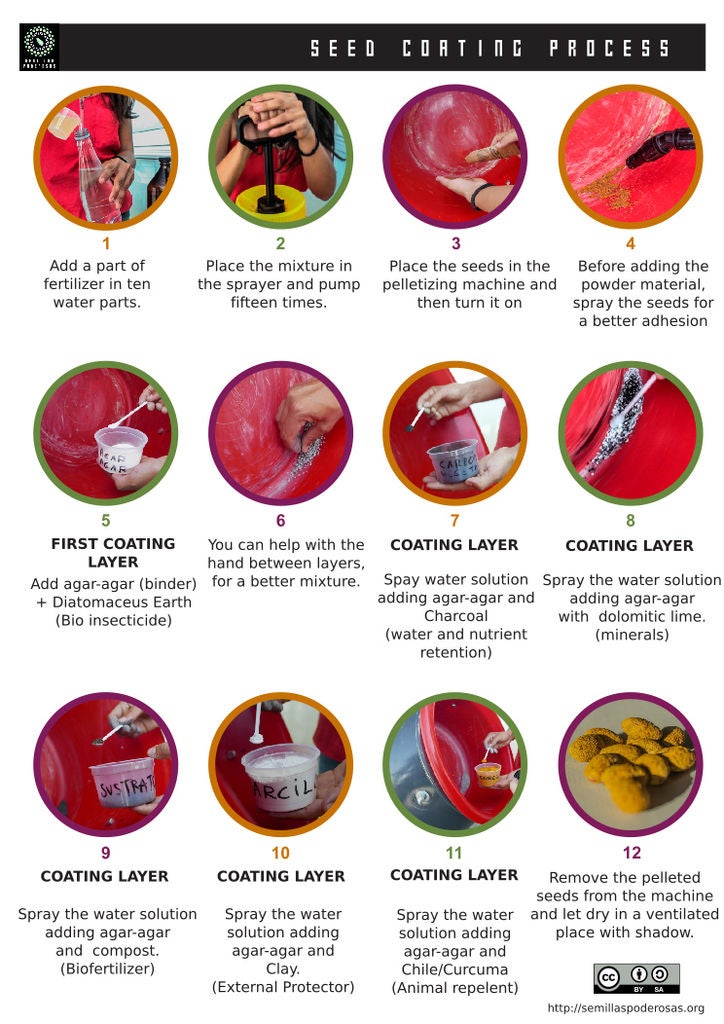
强力种子( Semillas Poderosas )是一个项目,我们使有机种子涂层的知识,使类型的成分和生产方法与低成本材料。
在退化土地的恢复中,无论是火灾还是不育土壤,种子造粒都是改善播种,降低种子成本和环境的关键因素需要。
我们希望这些信息对农民和环保主义者有用,可以进行修复工程,自己造粒,增加种子的活力,确保种子将在发芽过程中受到真菌和捕食者的保护,增加微生物学以提高土壤肥力。
我们使用传统的水泥搅拌机和水喷雾器开发了本教程,以便将大量种子造粒。为了将较小的种子造粒,可以将桶应用于混合器。我们的3层方法:
第一层: 生物保护。天然化合物,可以保护种子免受有害物质如真菌和细菌的侵害。主要的天然杀菌剂是:大蒜,荨麻,灰,马尾,肉桂,硅藻。
第二层: 营养 。它们是由有益的土壤微生物产生的天然有机肥料,其与根部产生协同作用。主要生物肥料:蚯蚓腐殖质,堆肥,液体肥料,高效微生物。
第三层: 外部保护。天然化合物,可以保护种子免受外来因素,如捕食者,阳光和脱水。防虫剂:灰,大蒜,硅藻土,丁香,姜黄烟草,辣椒,薰衣草。针对外部因素的药剂:粘土,水凝胶,木炭,石灰白云石。
介于两者之间:粘合剂。涂料通过粘合剂粘合或粘合物质,防止覆盖层破裂或撕裂。这些粘合剂可以是:车前子,海藻酸盐,琼脂,阿拉伯树胶,明胶,植物油,奶粉,酪蛋白,蜂蜜,淀粉或树脂。
我们建议你从小控件开始,直到你掌握了这项技术。这个过程很简单,但需要经验直到你知道正确的金额。
固体成分应该涂得非常薄,一点一点地涂抹,不会形成结块或产生没有种子的颗粒。液体组分通过尽可能薄的粉碎机施加,不会产生液滴。在材料和材料之间施加最少量的液体以改善灰尘在球上的附着力。有些材料需要比其他材料更多的粘合剂,因为它们可能更贴纸。如果你将球粘在一起,你可以非常小心地将它们分开,因为它们会破裂。良好的造粒不应该需要机械分离。
在视频中,您将看到 Eruca Sativa 涂层工艺的一个例子。请注意,这是一个示例,您可以根据不足或潜在的土壤和种子,也可以从捕食者,或您所在地区的成分的可用性,组合不同的涂层组件。在本教程中,我还提供了可以使用的附件清单。
作为粘合剂,我们将使用琼脂琼脂。作为生物保护剂,我们将使用硅藻土。作为营养成分,木炭,还有堆肥,白云石和液体生物肥料。用于外保护层的粘土和姜黄。
最重要的元素是种子,不得使用农用化学品进行任何类型的处理。
生物肥料被稀释在水中的比例为十分之一。在这种情况下,50升立方厘米的半升水。液体制剂在液体喷雾器中,我们给它施加15次压缩。
我们将种子存放在机器中,并用水喷洒。喷雾应尽可能小,以免形成肿块。然后我们打开机器,开始涂层。
如果你的手粘在一起,你可以轻轻地将种子分开。
我们加入硅藻粉并混合形成均匀的混合物,然后我们加水解除块状物。
将木炭加入混合物中并重复喷水,然后加入白云石或钙质土。
一旦层形成良好,衬底尽可能薄。为此,您可以使用过滤器。
将粘土与种子充分混合。最后,对于外保护层,我们决定加入姜黄。
颗粒状的种子应该在阴凉处在户外晒干,否则它们会制动。
-
无人机
+关注
关注
224文章
9881浏览量
174793
发布评论请先 登录
相关推荐
无人机与反无人机:高空中的智慧较量和“猫鼠游戏”|特信无人机反制
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程
第一集 知语科技无人机反制技术与应用--无人机的定义与分类
知语云智能科技揭秘:无人机威胁如何破解?国家安全新防线!
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
无人机全景监测:空域管理的新革命
震撼发布!知语云智能科技引领革新,全景反制无人机系统破茧而出!
四旋翼无人机飞行原理【其利天下无人机方案开发】

\"【重磅推出】知语云智能科技:革新低空无人机反制系统,守护领空安全!
什么是无人机图传系统?无人机图传系统的构成





 工商网监
工商网监
评论