 关于四旋翼无人机测试解决方案的分析和介绍
关于四旋翼无人机测试解决方案的分析和介绍
近几年,多旋翼无人机在越来越多的领域得到了广泛应用,如视频拍摄、输电线路勘测、安防监控等。多旋翼无人机也逐渐成为一个新的商业热点,引起了专业人士、业余爱好者和高校师生等众多群体的关注。而多旋翼无人机组件性能的测试是保证其设计过程中调试效率的关键。本文会对四旋翼无人机的几个关键部分的测试进行实测介绍。
一、飞控测试
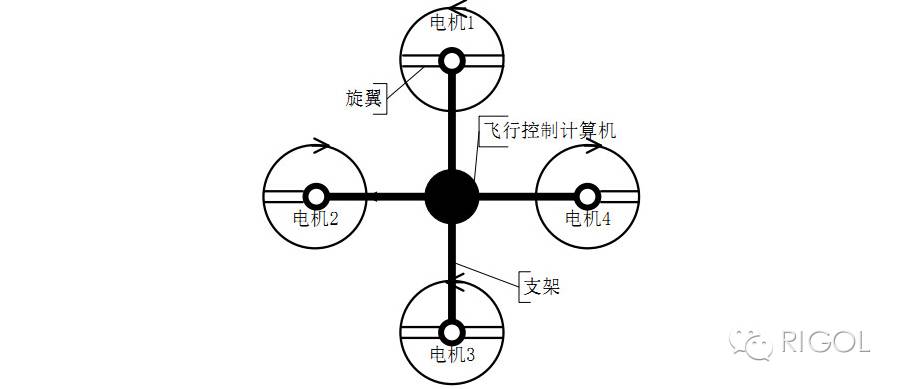
飞控板的作用是从接收机接收控制信号,转换为4个螺旋桨的转速信息后,通过飞控板上的陀螺仪对四轴飞行状态进行快速调整,控制飞行器的平衡状态。主要作用是给多旋翼飞机增稳。比如做悬停动作时,四轴无人机需要飞控不断调整四轴电机转速,使其平衡稳定保持悬停状态。

飞控是四旋翼无人机的核心控制部分。因其较高的精度控制要求及多种总线通信信号的处理要求,使其无论在设计还是调试过程都占据了大量的时间。通常无人机组装过程中对飞控的调试占据了90%以上的时间。因而对其使用测试仪器进行测试可以提高调试效率。
飞控测试包含以下测试内容
I2C总线
飞控板与各控制部分间通信都是采用总线。如定高超声波模块会定时将高度信息反馈给飞控,光流模块也会定时将扫描到的地面位置信息反馈给飞控进而对比得到位置变化信息。这些通信采用的都是I2C总线,在调试过程可以通过示波器测试指令发送的正确性,返回数据的传输正确性及信号本身的传输质量,快速检查通信质量。
I2C(Inter-Integrated Circuit)总线是微电子通信控制领域广泛采用的一种总线标准。通过串行数据(SDA)线和串行时钟(SCL)线在连接到总线的器件间传递信息。支持7位和10位寻址模式。
I2C总线有三种数据传输速度:标准的是100Kbps,快速模式为400Kbps,高速模式为3.4Mbps。发送到SDA 线上的每个字节必须为8 位,每次传输可以发送的字节数量不受限制。每个字节后必须跟一个响应位。首先传输的是数据的最高位(MSB)。
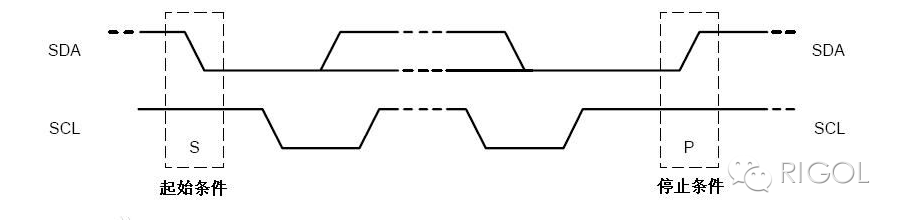
I2C的包起始信息- SCL为高时,SDA发生从高到低的翻转
I2C的停止状态– SCL为高时,SDA发生从低到高的翻转
第9个比特是Master 发出的ACK(响应),要求传输中主机接收器必须通过在从机发出的最后一个字节时产生一个响应,向从机发送器通知数据结束。
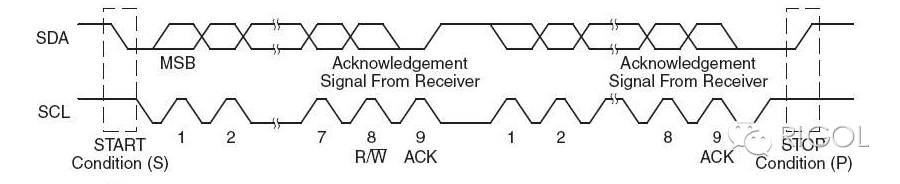
7-bit I2C总线祯结构
通过示波器可对I2C总线信号进行观测并解码查看返回高度信息。
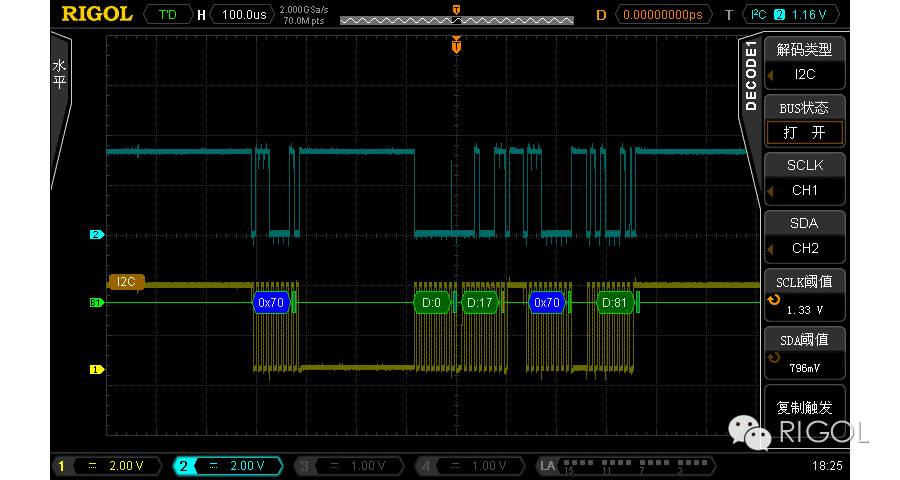
超声波定位信息通信解码
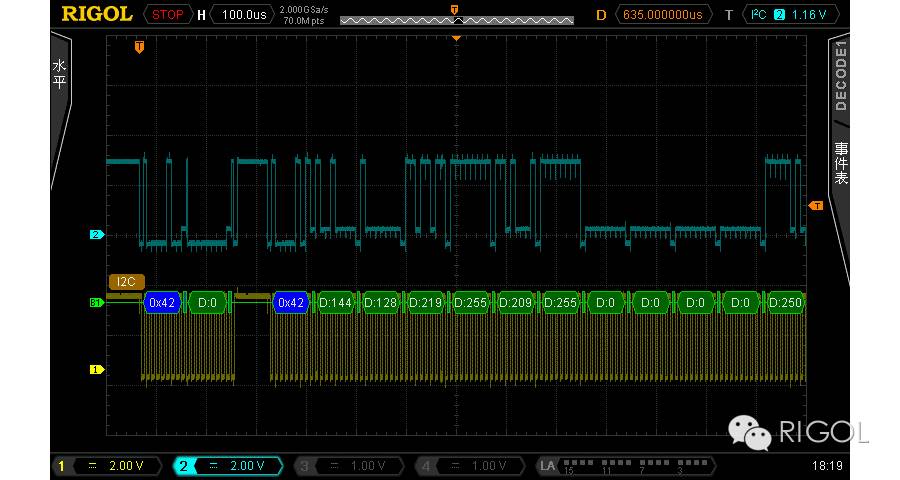
光流定位信息通信解码
RS232总线
其他通信部分还会采用串口通信。如定高超声波控制板与超声波模块间采用RS232进行通信。
RS232是异步传输标准接口,是目前最常用的一种串行通讯接口。规定的数据传输速率为每秒50,75,100,150,300,600,1200,2400,4800,9600,19200波特。通常以9个引脚(DB-9) 或是25个引脚 (DB-25) 的型态出现。工业控制的RS-232口一般只使用RXD、TXD、GND三条线。其结构如下:
–1个起始比特
–每字符7或8数据比特
–任意奇偶比特
–1或2个截至比特
–与其它串行总线不同(采用负逻辑)高电平为逻辑”0”,低电平为逻辑”1”

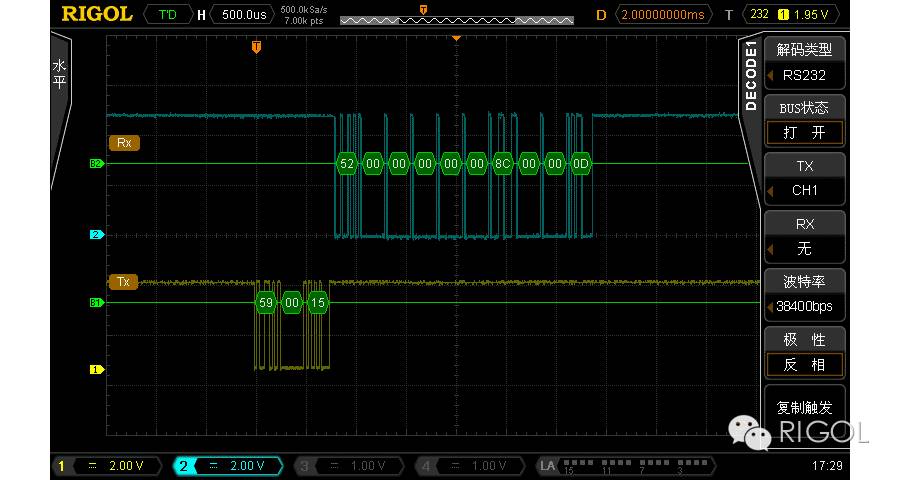
通过示波器可测试超声定高模块与控制电路间的RS232通信质量。控制电路会定时给超声定高模块发送读数命令,之后各个超声定高模块会将各自当前高度值传回给控制电路分析。所以可以从示波器解码出来的RS232 TX和RX信息看出之间的触发关系及对应的高度信息是否正确。
S-bus总线
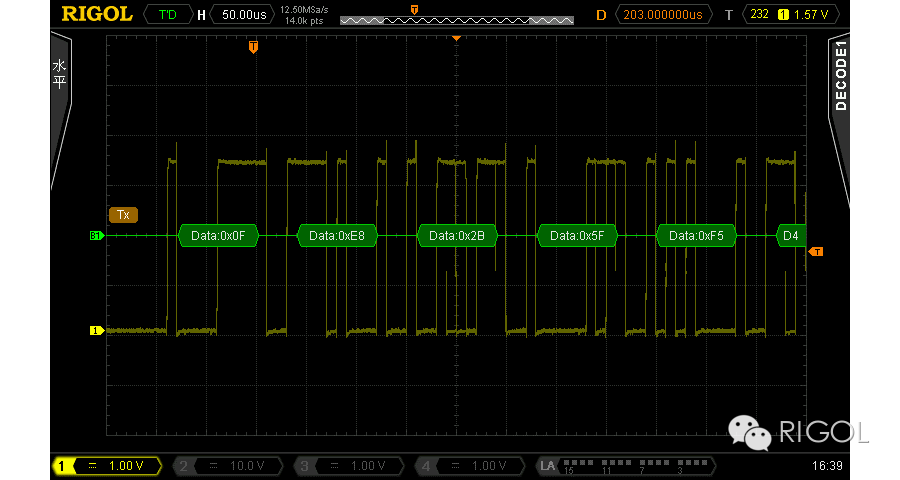
S-BUS总线为futaba使用的串行通信协议。实际上为串口通信。主要用在接收机接收遥控器控制信号后与飞控间通信。串口配置为波特率100kbps,8位数据,偶校验(even),2位停止位,无流控。帧间隔为14ms (analog mode) 或 7ms (highspeed mode) 。每帧25个字节,顺序如下

起始字节startbyte = 11110000b (0xF0),但实际上用STM32收到的是0x0F。中间22个字节就是16个通道的数据。data1为ch1的低8位,data2的低3位为ch1的高三位,data2的高5位是ch2的低5位,data3的低6位是ch2的高6位,以此类推。
data 1-22= [ch1, 11bit][ch2, 11bit] .... [ch16, 11bit] (ch# = 0 bis 2047)
通过示波器的解码功能,可定位通道控制信息。
数传通信
四旋翼无人机会实时将无人机的飞行状态参数通过无线信号发送给APP控制端。此外一些携带摄像机或照相机的无人机也会通过无线信号进行图传。所以可通过频谱分析仪测试无线传输信号的频率范围及功率大小。通过在频谱分析仪接收端连接频率匹配的天线,在数传无线信号工作时进行监测,通过调节无人机的距离可测试接收功率与距离的关系。

二、遥控器
遥控器测试包含以下三个方面:
无线频率
占用带宽
发射功率
遥控器信号质量的好坏直接决定着对四旋翼无人机的飞行操控性。所以在设计和问题排查阶段对遥控器发出的无线信号频率稳定度,频率偏差,占用带宽,通道功率等进行标测,可确保遥控信号的质量和问题的定位。
此部分可以通过频谱分析仪配置频率匹配的天线进行测试。
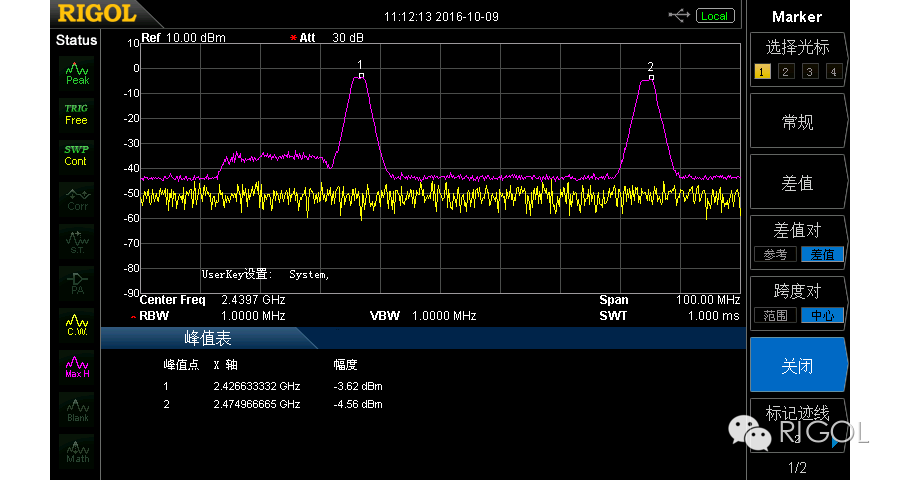
遥控信号占用带宽的测试用来确认不同信道间是否会产生干扰和窜扰。信道功率用来确认发射功耗情况。
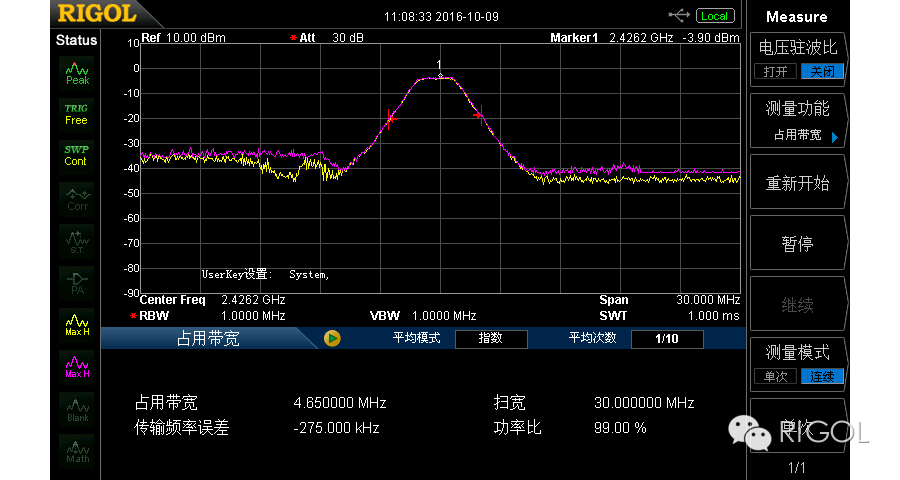
遥控信号占用带宽测试
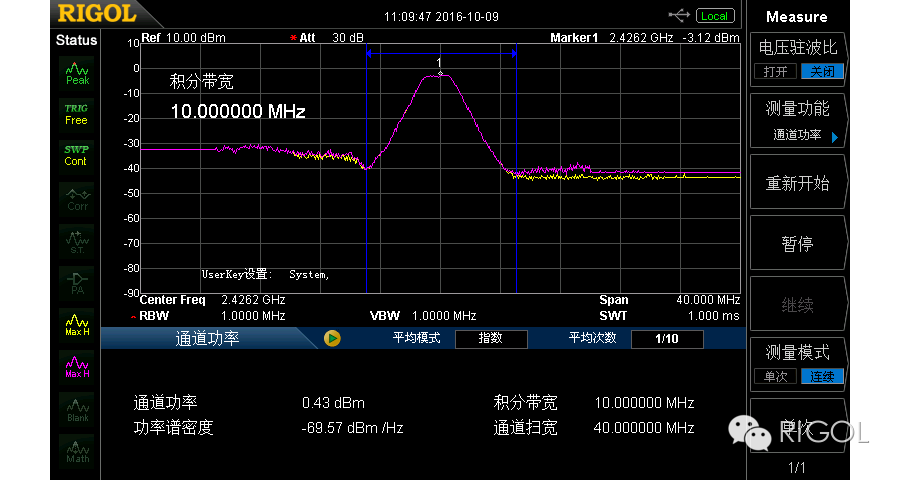
遥控信号通道功率测试
三、电机测试
电机测试主要包含以下方面:
PWM调速
稳定性
多旋翼无人机多个电机的转速是否均匀,稳定决定着飞行状态的稳定性。无刷直流电机由于启动转矩大,调速范围广,体积小,噪声小等多种优点,使其成为多旋翼无人机的首选发动机。
电机的调速是通过控制电路控制开关管的导通时间决定的。多旋翼无人机的调速一般是采用调节三相全桥电路的开关管的导通信号占空比来实现的。其控制信号有PWM, PPM, PCM。
可以通过函数信号发生器产生占空比与速度可调的PWM波形,测试电机可调范围及转速稳定性。

-
控制电路
+关注
关注
81文章
1609浏览量
134905 -
遥控器
+关注
关注
18文章
814浏览量
64235 -
无人机
+关注
关注
224文章
9883浏览量
174797
发布评论请先 登录
相关推荐
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程
第一集 知语科技无人机反制技术与应用--无人机的定义与分类
知语云智能科技揭秘:无人机威胁如何破解?国家安全新防线!
知语云智能科技无人机防御系统:应对新兴威胁的先锋力量
无人机全景监测:空域管理的新革命
震撼发布!知语云智能科技引领革新,全景反制无人机系统破茧而出!
四旋翼无人机飞行原理【其利天下无人机方案开发】








 工商网监
工商网监
评论