 应该如何配置工业ABB机器人的离线程序详细教程说明
应该如何配置工业ABB机器人的离线程序详细教程说明
工业机器人品牌包括KUKA、ABB、FANUC、COMAU、MOTOMAN等,项目当中有些品牌的机器人需要仿真工程师出离线程序的,以便于现场机器人调试使用。但就离线怎么出而言,好多朋友还是一头雾水,网上有关这方便的信息也是少之又少,那怎么办?
工欲善其事,必先利其器,首先你要有工具储备,还要知道怎么配置离线RCS,今天就ABB机器人的离线配置详细介绍下!
工具以及原料
★ Process Designer&Process simulation
配置RCS准备文件:
1,控制器(不同版本的ARPID和OLP_TOOL)
Tecnomatix_11.1TR3_ABB_RAPID_64BIT_v2.102_19_10_2016
Tecnomatix_11.1TR3_OLP_TOOL_64BIT_v12.2.6_18_10_2016
2,驱动网卡
openvnc_2_1_rc20
3,RCS配置文件
rrs_bin
本文就以PDPS11.1版本为例
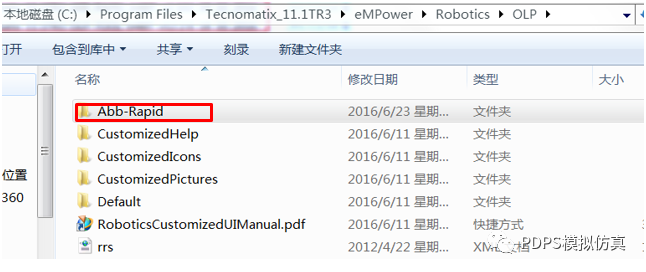
Step1:首先按照PDPS版本安装对应版本的RAPID和OLP_TOOL插件
安装之后在此路径下出现abb-Rapid文件夹,如下图所示
Step2:安装虚拟网卡,一路进行下一步,直至安装结束

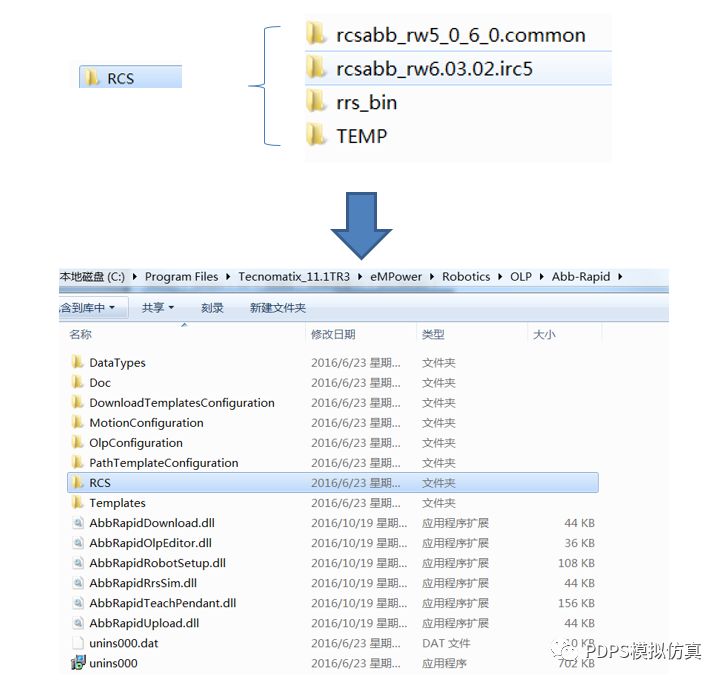
Step3:设置rcs存在路径,复制RCS文件夹至下图路径(非固定路径)
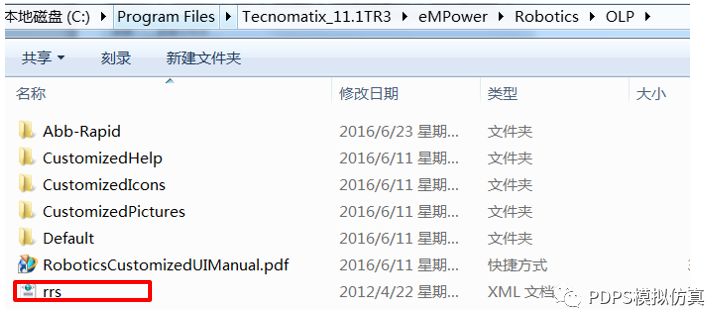
Step4:该文件下找到并且编辑rrs文件

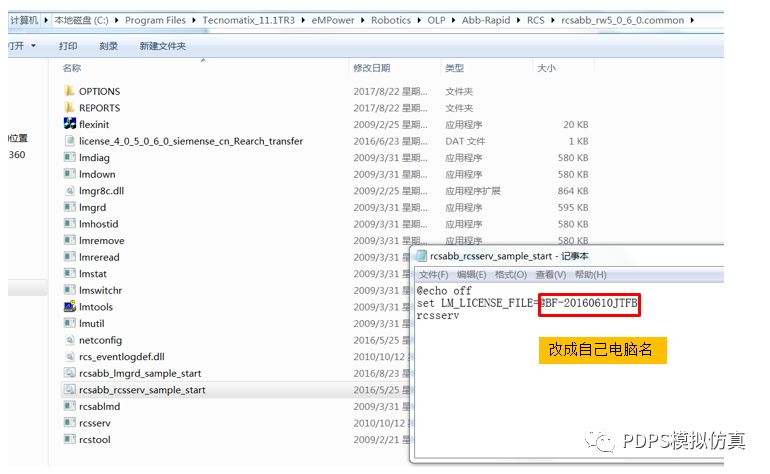
Step5:在该文件下C:Program FilesTecnomatix_11.1TR3eMPowerRoboticsOLPAbb-RapidRCS csabb_rw5_0_6_0.common找到许可文件,编辑license文件并填写网络阈值
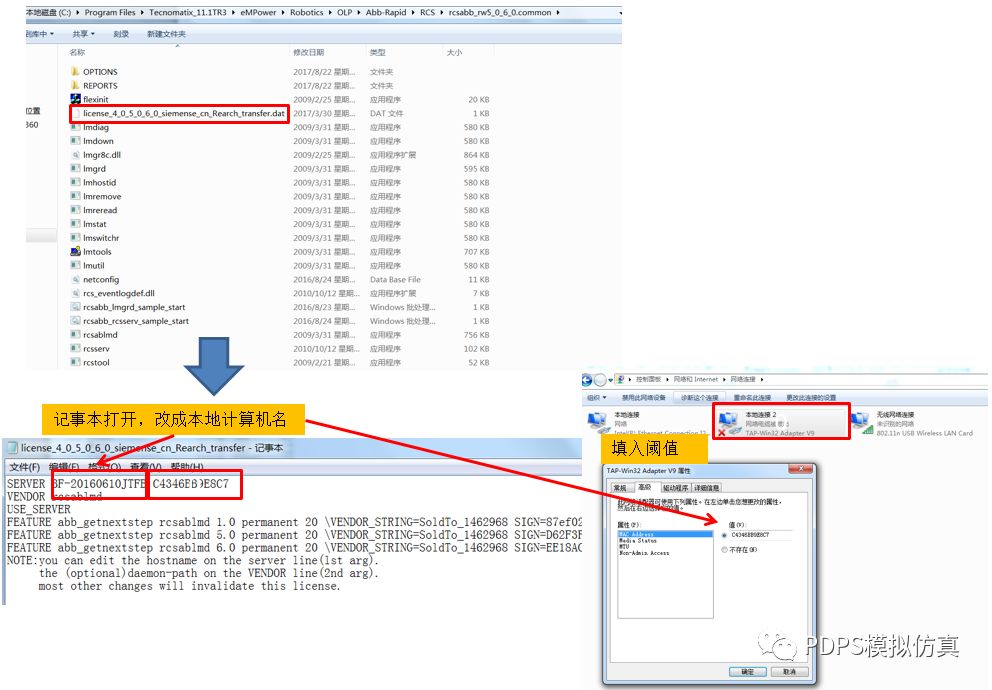
Step6:图示两个文件,需改成本地计算机名字

&
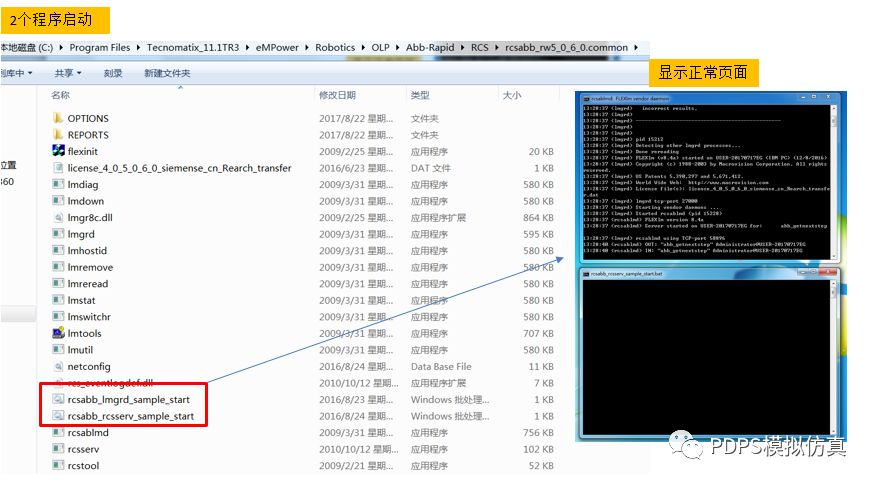
Step7:服务程序开启
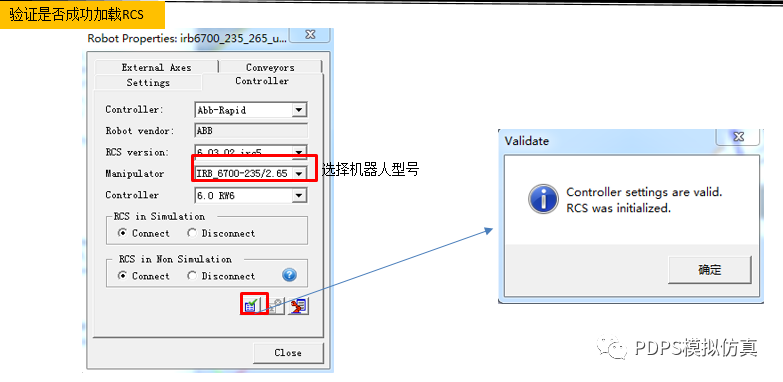
Step8:打开工位,验证机器人是否配置成功
-
控制器
+关注
关注
112文章
15223浏览量
171175 -
机器人
+关注
关注
206文章
27033浏览量
201393 -
ABB
+关注
关注
26文章
503浏览量
50936
原文标题:如何配置工业ABB机器人离线程序
文章出处:【微信号:PDPS-ROBCAD,微信公众号:PDPS模拟仿真】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论