好的,我们来详细解释一下二相步进电机驱动电路及其原理图。
什么是二相步进电机驱动电路?
二相步进电机驱动电路是一种电子系统,它接收来自控制器(如微控制器或运动控制卡)发出的低功率数字信号(步进脉冲和方向信号),并将其转换和放大成足够的功率(电压和电流)以及精确的电平切换顺序,来驱动二相步进电机的两相绕组(通常称为A和B相),从而使电机转子按照控制信号的指令精确地旋转步进角度或保持位置。
简单来说,它充当控制器和电机本身之间的“翻译”和“动力放大器”。控制器说“走一步”或“反转”,驱动电路就指挥电机完成这个动作。
二相步进电机驱动电路原理图解析
一个典型的二相步进电机驱动电路主要由以下几个功能模块组成。下面结合一个基于集成驱动器IC(如A4988、DRV8825、TMC2208等)的简化原理图进行解析:
 (请注意:此图非常简化,实际电路会根据具体驱动器IC有所不同,但核心概念一致)
(请注意:此图非常简化,实际电路会根据具体驱动器IC有所不同,但核心概念一致)
核心模块解析
-
控制器 (Microcontroller/MCU):
- 作用: 整个系统的“大脑”。它决定何时走多少步、以什么速度(频率)、向哪个方向旋转。
- 连接: 通常输出STEP (PUL)脉冲信号(每个上升沿触发电机移动一步)和DIR (DIR)方向信号(高电平/低电平决定正转或反转)。还可能输出ENABLE信号(低电平有效,用于禁用驱动器输出,使电机自由)。
- 原理图标示: 通常画为一个小方块,引出
STEP,DIR,ENABLE,GND等引脚线。
-
驱动芯片模块 (Driver IC):
- 作用: 这是电路的核心部件。它将控制器发出的简单指令(步、方向、使能)解码,并生成精确的、时序控制下的高功率逻辑信号,这些信号直接控制后续功率开关器件的状态。
- 关键功能:
- 脉冲解码与顺序控制: 接收STEP脉冲,并根据DIR状态,按照预先设定好的步进时序模式(例如:整步、半步、1/4微步等)控制内部逻辑。
- 电流控制: 这是驱动器IC最重要的功能之一。它通过PWM(脉宽调制) 技术来主动限制并精确控制流入电机绕组(A和B)的峰值电流。
- 原理: IC会通过检测外部功率MOSFET Source极(源极)和GND之间串联的电流检测电阻 (Rsense)上的压降(
Vref = Ipeak * Rsense)来实时监控相电流。当电流达到设定值(由Vref电压决定)时,IC内部的比较器会触发,驱动IC会快速暂时关闭对应的MOSFET,阻止电流继续上升。当电流降低到一定程度后,重新打开MOSFET。 - Vref设定: 用户通常通过一个外部精密可调电阻 (电位器) + 分压电阻网络产生一个参考电压(
Vref)连接到驱动器IC的VREF(或I_SET) 引脚。Vref值直接决定了IC所允许的最大峰值电流(Ipeak = Vref / (Rsense * Gain),其中Gain由IC内部设定,常为5或8)。
- 原理: IC会通过检测外部功率MOSFET Source极(源极)和GND之间串联的电流检测电阻 (Rsense)上的压降(
- 微步控制: 高级驱动器支持微步驱动。通过调整内部DAC(数模转换器)输出,使每相的PWM占空比精细变化,从而让相电流在+
Ipeak, 0, -Ipeak之间连续变化,模拟出近似的正弦波电流(每个方框代表一次整步的电流波形)。通过MS1、MS2、MS3等引脚的高低电平组合来选择微步模式(如1/2, 1/4, 1/8, 1/16等)。微步大大提高了电机运行的平滑度和定位分辨率。 - 过温/过流保护: IC内部通常集成温度传感器和过流检测电路。在过热或过流时(如电机堵转),会自动关闭功率输出并可能通过
FAULT引脚通知控制器。 - H桥逻辑输出: IC内部逻辑最终输出4路控制信号(如
AIN1,AIN2控制A相,BIN1,BIN2控制B相)给功率级。每一路信号控制功率级中H桥的一个MOSFET。
- 连接: 接收
STEP,DIR,ENABLE,VREF。输出1A,2A,1B,2B(或类似名称)控制4个MOSFET。有VMOT(主电源),GND,逻辑电源VDD(通常接控制器电源3.3V/5V),Rsense引脚连接电流检测电阻两端,MSx引脚用于微步选择。 - 原理图标示: 图中核心的芯片部分。引出了
STEP,DIR,EN,VREF等输入信号线到外部MCU和电位器,以及1A,2A,1B,2B输出信号线连接到后续的功率级MOSFET。
-
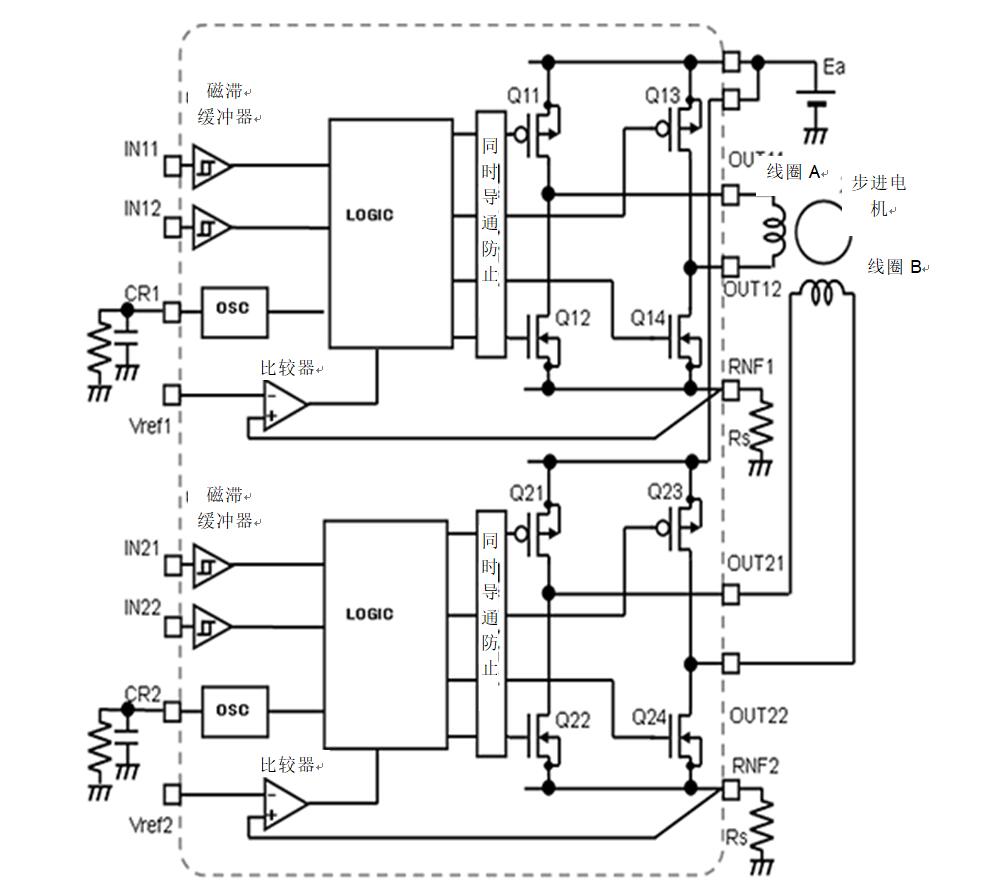
功率开关级 (Power MOSFET H-Bridge):
- 作用: 接收来自驱动芯片的4路控制信号,并执行实际的开关动作,将主电源 (VMOT) 的高电压、大电流以正确的方向接入A相绕组和B相绕组。每个相位需要1个完整的H桥电路。
- 核心结构 (单个H桥):
- 由4个功率MOSFET(场效应管)构成,组成一个H形拓扑:
- 左上方臂:Q1 (常为P型MOSFET或N型) - 控制电流“流入”绕组上端 (
1A) - 左下方臂:Q2 (通常为N型MOSFET) - 控制电流“流出”绕组上端 (
2A) - 右上方臂:Q3 (控制绕组下端
1B) - 右下方臂:Q4 (控制绕组下端
2B)
- 左上方臂:Q1 (常为P型MOSFET或N型) - 控制电流“流入”绕组上端 (
- 绕组连接在H桥的左右两个桥臂之间(如
1A和2A之间)。
- 由4个功率MOSFET(场效应管)构成,组成一个H形拓扑:
- 工作原理 (以电机A相为例):
- 正向电流 (顺时针): 开启 Q1 和 Q4,关闭 Q2 和 Q3。电流路径:
VMOT -> Q1 -> 绕组 (A+, A-) -> Q4 -> RSENSE -> GND。 - 反向电流 (逆时针): 开启 Q2 和 Q3,关闭 Q1 和 Q4。电流路径:
VMOT -> Q3 -> 绕组 (A-, A+) -> Q2 -> RSENSE -> GND。 - 自由轮续流 (Freewheeling/Decay):
- 当MOSFET关闭瞬间,绕组的电感会试图维持电流。此时,续流二极管 (通常集成在MOSFET内部,即体二极管,图中没有单独画出) 或外部并联的肖特基二极管会提供回路,让电流继续流动消耗存储在磁场中的能量,防止产生破坏性的高电压(
L di/dt)。驱动器IC会根据设定的衰减模式主动控制哪对MOSFET短暂开启以加快电流衰减(快衰减)或减慢衰减(慢衰减)。
- 当MOSFET关闭瞬间,绕组的电感会试图维持电流。此时,续流二极管 (通常集成在MOSFET内部,即体二极管,图中没有单独画出) 或外部并联的肖特基二极管会提供回路,让电流继续流动消耗存储在磁场中的能量,防止产生破坏性的高电压(
- 关断状态: 四个MOSFET都关闭,绕组与电源断开。
- 正向电流 (顺时针): 开启 Q1 和 Q4,关闭 Q2 和 Q3。电流路径:
- 驱动电流流向:
1A/2A信号驱动构成A相H桥的4个MOSFET;1B/2B信号驱动构成B相H桥的4个MOSFET。 - 原理图标示: 在驱动IC下方,
VMOT(通常24V/36V/48V) 连接到H桥顶端的公共点(P-MOS的S极或高侧驱动器)。每个MOSFET栅极(G)连接到驱动IC的对应输出引脚 (1A,2A,1B,2B)。绕组连接在H桥的两个桥臂中点之间。MOSFET的源极(S)接地端连接电流检测电阻RSENSE然后到GND。
-
电源与滤波网络 (Power Supply & Filtering):
- VMOT: 给H桥和电机供电的高电压大电流主电源(如24V, 36V, 48V)。容量要足够。
- VDD/Logic VCC: 给控制器和驱动器IC内部逻辑电路供电的电源(通常5V或3.3V)。
- 电容 (C_Bulk, C_Bypass):
- 大容量电解电容 (C_Bulk): 并联在
VMOT和GND之间,靠近驱动器IC和功率级。主要作用是提供短时峰值电流(MOSFET开通瞬间需要大电流),吸收电机绕组续流时的反向电动势能量,平缓电源波动。容量通常是100uF到1000uF或更大。 - 陶瓷电容 / 小容量电容 (C_Bypass): 并联在
VMOT-GND靠近IC引脚处,及并联在VDD-GNDIC引脚处。主要作用是滤除高频开关噪声。容量通常在0.1uF - 10uF。
- 大容量电解电容 (C_Bulk): 并联在
-
电流检测电阻 (RSense):
- 作用: 将流过绕组的电流转化为一个微小的、可测量的电压降信号 (
V_sense)。这个信号反馈给驱动器IC的电流检测端(如SENSE引脚)。 - 原理: 根据欧姆定律,
V_sense = I_phase * RSense。 - 要求: 功率承受能力强(至少1W或更高,取决于电流大小),低电感,高精度(1%或更低),阻值很小(通常0.05Ω到0.3Ω)。
- 原理图标示: 一个电阻,串联在所有功率MOSFET的低端与
GND之间。电阻两端连接到驱动器IC的SENSE(或RS+,RS-) 引脚。
- 作用: 将流过绕组的电流转化为一个微小的、可测量的电压降信号 (
-
微步选择设置 (Microstep Configuration):
- 作用: 通过配置驱动器IC上的
MS1,MS2(有时还有MS3) 引脚的电平(高或低),来选择所需的微步分辨率(如全步、1/2步、1/4步、1/8步、1/16步)。 - 原理图标示:
MS1,MS2,MS3引脚会连接到固定的逻辑电平(VDD或GND),或者连接到控制器的GPIO引脚以动态切换。
- 作用: 通过配置驱动器IC上的
总结驱动过程
- 指令接收: 控制器(MCU)根据程序指令,产生低电平的
EN、高/低电平的DIR和脉冲信号的STEP。 - 解码与电流设定: 驱动器IC接收这些信号。
EN决定是否启用输出。DIR决定旋转方向。STEP的每个上升沿触发一次步进动作,内部逻辑根据方向和当前微步模式,确定下一步应给A相和B相设定的目标电流大小和方向。 - PWM电流控制:
- IC根据
VREF设定的电流值(Ipeak),驱动内部PWM控制逻辑。 - IC输出
1A/2A信号驱动A相H桥的4个MOSFET(Q1-Q4)。同时输出1B/2B信号驱动B相H桥的4个MOSFET(Q1-Q4)。 - 电流流过A相和B相绕组。
RSense产生反馈电压V_sense。 - 驱动器IC持续比较
V_sense与内部设定的电流门限。当电流即将超过Ipeak时,IC会暂时关闭对应相位的输出MOSFET(称为斩波斩波)。当电流下降到某个下限值时,再次开启MOSFET(PWM模式)。这种快速开关实现了恒流控制。
- IC根据
- 绕组励磁与步进: 精确控制的两相电流按设定的序列变化(如两相正弦波电流的90度相位差),在电机气隙中产生旋转的合成磁场,吸引转子(带永磁体)转动一个步进角或微步角度。
- 保护: 如检测到持续过流或温度过高,驱动器IC会自动关闭功率输出(断开MOSFET)并可能报告错误状态。
关键点: 二相步进电机驱动电路的核心在于驱动芯片的智能电流控制功能和精确的时序生成能力,以及H桥功率级的执行能力。微步技术极大地提升了电机运动的平滑性和精度。
两相双极步进电机的驱动 其2

在上一篇文章“两相双极步进电机的驱动 其1”中,给出了两相双极步进电机的基本驱动电路示例和驱动波形。此次“两相双极步进电机的驱动 其2”篇,将介绍驱动两相双极步进电机过程中电流再生时的Decay:电流衰减。
2023-02-24 09:51:11

如何调整二相步进电机的步进角度,控制步进角度的功能?
在当今的自动化设备中,二相步进电机作为一种常见的驱动元件,其精确控制步进角度的功能尤为重要。那么,博扬智能如何调整二相步进电机的步进角度呢?
2024-03-25 17:49:58
两相单极步进电机的驱动电路
继上一篇“两相双极步进电机的驱动”之后,本文将从两相单极步进电机的驱动电路,两相单极步进电机的两相励磁PWM驱动波形两个方面来介绍“两相单极步进电机的驱动”。如欲了解有关双极步进电机和单极步进电机之间差异的更多信息,请参考这里。
2023-02-24 09:51:11
二相步进电机与三相步进电机的区别
步进电机主要是依相数来做分类的,通常我们常见的有四相、二相、三相等几类。 二相步进电机与三相步进电机的区别: 电机的相数 是指电机内部的线圈数不同,二相步进电机电机内部是由2个线圈
2021-07-20 14:32:16
分享六种步进电机驱动电路
BYG通用系列二相步进电机最常采用的单极性和双极性2种驱动电路的设计方案。从原理上体现了二相步进电机的控制方法,增加了步进电机驱动电路设计的灵活性。二相步进电机的单极性和双极性2种驱动电路设计都采用
2023-01-15 17:17:25
步进电机驱动原理图
步进电机驱动原理图,从步进电机的转动原理可以得出,要使步进电机正常运行,必须按规律控制步进电机的每一相绕组得电。步进驱动器接收外部的信号是方向信号(DIR)和脉冲信号(CP)。另外步进电机在停止
![]() snandi
2021-07-12 07:41:21
snandi
2021-07-12 07:41:21
MC33991二相步进电机驱动集成电路相关资料下载
MC33991是Motorola(摩托罗拉半导体)生产的二相步进电机驱动集成电路。它是双列贴片24脚封装。通过SPI(同步串行外设接口)进行通信、可同时控制二个步进电机的驱动电路。该电路由4个可驱动
![]() 小香干
2021-05-20 06:38:01
小香干
2021-05-20 06:38:01
二相四拍步进电机控制驱动器电路BL5607电子资料
概述:BL5607二相四拍步进电机驱动器电路,是在BL5606 电路基础上根据用户新的使用要求而重新设计的复费率电动计度器步进电机控制驱动专用集成电路。BL5607采用双列贴片18脚封装。
![]() 远风
2021-04-14 07:08:08
远风
2021-04-14 07:08:08
六种常见步进电机驱动电路
推荐课程:张飞软硬开源:基于STM32的BLDC直流无刷电机驱动器(视频+硬件)http://url.elecfans.com/u/73ad899cfd步进电机驱动电路图一:二相步进电机驱动电路
![]() 王小琳子
2019-06-24 06:30:00
王小琳子
2019-06-24 06:30:00
步进电机的相数是什么意思
步进电机的相数:是指电机内部的线圈组数,目前常用的有二相、三相、四相、五相步进电机。电机相数不同,其步距角也不同,一般二相电机的步距角为0.9°/1.8°、三相的为0.75°/1.5°、五相的为
![]() 南海姑娘
2021-08-31 07:17:50
南海姑娘
2021-08-31 07:17:50
ULN2003A驱动步进电机的原理图
,VCE最高达到50V; 如下图是全部的封装 ULN2003A驱动步进电机原理图 以四相八拍步进电机为例,该步进电机为四相步进电机,采用直流电源供电,只要对步进电机的各相绕组按合适
![]() 一只耳朵怪
2021-01-13 16:26:06
一只耳朵怪
2021-01-13 16:26:06
如何去使用两相四线步进电机?
初入手步进电机,摸索了一段时间,搞明白了怎么使用。下面我以两相四线为例。第一,找到AB相。如下图所示:此时也可以用万用表二极管档测试,得出AB相。第二,连接驱动器。黑绿和红蓝互换位置也是可以的。按上图解法即可实现控制。...
![]() 黄色的小金橘
2021-07-07 07:33:46
黄色的小金橘
2021-07-07 07:33:46
两相步进电机和配套的两相步进电机驱动器比较
。比较常用的就是两相步进电机和配套的两相步进电机驱动器。 首先来看看步进电机,看下面的图,一是两相步进电机的外形,二是五相步进电机内部结构图。具体它是怎么工作的我们在这里不做具体的讨论,只要知道它转
![]() 胡扯123
2023-03-13 14:16:17
胡扯123
2023-03-13 14:16:17
步进电机的驱动与控制
步进电机的驱动与控制,步进电机基础(5.9)-步进电机的驱动与控制-三相步进电机的驱动电路前言基本信息前言说明5.9 三相步进电机的驱动电路1 . 三相电机的驱动方式三相步进电机用驱动器ICICIC
![]() jack_study
2021-07-08 09:06:00
jack_study
2021-07-08 09:06:00
驱动电压和电压调节是二相步进电机的精准性能策划

二相步进电机的工作原理基于电流在两个相位之间切换,从而产生旋转的磁场,驱动电机转动。因此,驱动电压对电机的性能起着决定性的影响。驱动电压的高低不仅决定了电机的转速,还影响到其转矩、噪声和发热等。
2024-03-25 18:31:50
二相步进电机和三相步进电机有什么区别?相关资料推荐
二相步进电机和三相步进电机有什么区别?二相步进电机和三相步进电机有什么区别?1. 电机的相数是指电机内部的线圈数不同,两相步进电机电机内部是由2个线圈组成,而三相步进电机内部是由3个线圈。2. 电机
![]() riverdj
2021-07-08 07:56:56
riverdj
2021-07-08 07:56:56
步进电机+驱动ULN2003相关资料分享
:**电机内部的线圈组数。常见的有二相、 三相、 四相、 五相步进电机。如果使用细分驱动器,则“相数”将变得没有意义,用户只需在驱动器上改变细分数,就可以改变步距角。**2.线:**步进电机有...
![]() huzp_bbs
2021-06-29 09:05:38
huzp_bbs
2021-06-29 09:05:38
步进电机驱动电路原理 步进电机驱动器可以通用吗
步进电机驱动电路原理是指通过特定的电信号驱动步进电机工作的原理。而步进电机驱动器是将驱动电路封装成一个整体,便于直接使用和连接的设备。在本文中,我将详细介绍步进电机驱动电路原理。 一、步进电机驱动
2024-01-24 10:46:14
小功率4相步进电机的驱动 及智能驱动方案

01 小功率4相步进电机的驱动 下面是一种驱动电路框图: 达林顿管阵列ULN2803分别从锁存器取出第0,2,4,6位和1,3,5,7位去驱动两个步进电机.四相步进电机的通电顺序可以有几种:A,B
2020-11-11 14:39:59
【资料分享】图解步进电机、有刷与无刷电机
图解步进、无刷、有刷电机:有刷电机是基础,制动快,平滑调速范围大,控制电路简单。工作时电刷会产生电火花,较危险。连续工作5000小时,寿命2年。下图为有刷电机拆解,左手定子绕组,右手电刷。无刷
![]() 深海零下一度1
2021-06-30 06:13:17
深海零下一度1
2021-06-30 06:13:17
步进电机驱动电路和控制电路简述
步进电机驱动电路是一种控制步进电机旋转的电路系统。步进电机是一种特殊的电机,其转动角度是以固定的步进角度进行的,而不是连续的旋转。步进电机驱动电路可以将控制信号转换为电机电压和电流信号,使步进电机
2023-03-13 17:06:44
两相步进电机的双极连接和单极连接

从本文开始,将介绍两相双极步进电机和两相单极步进电机的驱动电路,以及两相双极步进电机和两相单极步进电机的驱动方法。首先介绍双极连接和单极连接。
2021-06-12 11:55:00
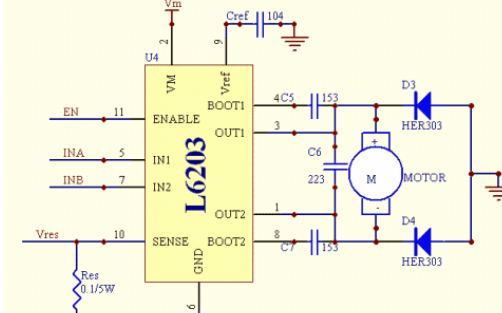
两相双极步进电机的驱动电路示例分析
可使用双通道的H桥驱动电路来驱动两相双极步进电机。该框图是通过PWM工作进行恒流驱动的电路示例,其工作原理基本上与使用PWM输出方式驱动有刷直流电机相同。
2023-03-10 09:16:13
两相步进电机和五相步进电机有什么区别?
步进电机主要根据相数来进行分类,其中二相和五相步进电机是目前市场上广泛采用的。二相步进电机每转最大可细分为400等分,而五相步进电机则可以细分为1000等分。因此,五相步进电机在控制精度
2023-12-22 08:40:32
一种基于FPGA的四相步进电机驱动方式
version:1.0change :NOdescriptipn:四相步进电机的驱动,二级转速,转向可调步进电机运
![]() c1441424
2021-07-08 06:42:26
c1441424
2021-07-08 06:42:26
 工商网监
工商网监





 工商网监
工商网监