 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
本文介绍了利用红外反射式传感器实现小车自动识别路线的设计与实现。系统控制核心采用AT89C52单片机。利用模糊算法以及PWM控制方式来实现直流电机的驱动。
自智能机器诞生至今,其发展已经经历了半个多世纪,已经形成了一个巨大的智能机器产业.智能机器是高新科技的综合产物,它涉及电子,机械,传感器,计算机,自动化,信息处理等多门学科。在无人驾驶机动车、无人工厂、仓库、服务机器人等领域智能巡线机器人有着广泛的应用前景。本文介绍的巡线机器人的主要工作原理是利用光电检测装置检测路面上的轨迹,并将轨迹信息送到单片机,单片机采用模糊推理求出转向的角度和行走速度,然后去控制行走部分,最终使机器人可以按照路面上的轨迹行走。
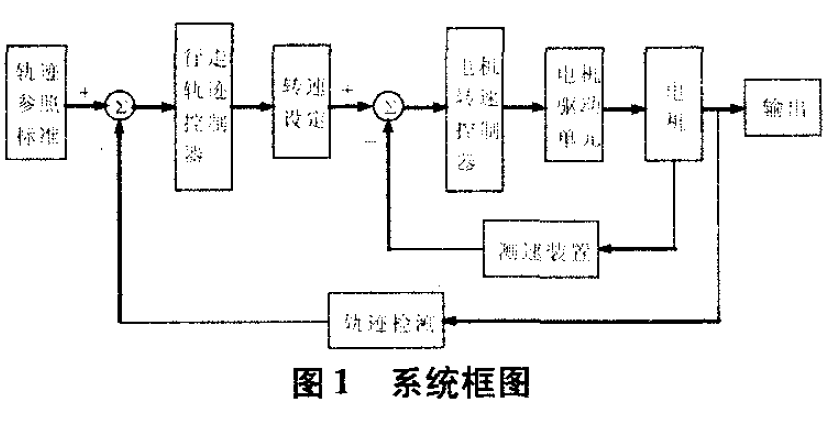
系统采用AT89C52为核心元件,驱动部分由两个6V直流电机构成。当机器人在铺有黑色轨迹的白色路面上行走时,由于白色地面与黑色轨迹对光反射存在强度上的差异。所以,我们利用路面检测鼯分中的红外光电发射接收二极管进行检测,判断车轮所在位置,并将检测到的信号进行A/D转换后反馈给单片机,从而为单片机控制机器人的运动(如转弯、直行等)提供了信息。图1为系统框图。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- AT89C52单片机实现喇叭驱动的设计 48次下载
- 基于AT89C52单片机+RC500读卡器电路设计资料 4次下载
- 单片机AT89C52控制的智能小车的设计 76次下载
- AT89C52单片机对蜂鸣器的设计资料下载 4次下载
- AT89C52中文数据资料 349次下载
- 使用红外反射式传感器实现小车自动寻迹导航的设计资料说明 18次下载
- 如何使用AT89C52单片机进行智能小车的设计 6次下载
- 使用AT89C52单片机进行最小系统的接口电路免费下载 13次下载
- 如何使用STC89C52单片机进行斗牛玩具机器人的研究概述 13次下载
- 基于AT89c52单片机微信跳一跳物理助手的实现和设计资料下载 19次下载
- AT89C52单片机2组8位左右控制LED移位 4次下载
- 基于AT89C52单片机的飞机副翼控制系统设计 74次下载
- 基于AT89C52单片机的步进电机控制系统设计 418次下载
- 基于AT89C52单片机的涡流管控制系统 28次下载
- 基于单片机及传感器的机器人设计与实现 49次下载
- 基于51单片机的万年历时钟仿真设计 963次阅读
- 基于51单片机的路灯自动开关控制仿真设计 694次阅读
- 基于51单片机的可调频率幅值的波形信号发生器设计 676次阅读
- 基于STC89C52单片机的智能交通灯设计 1852次阅读
- 基于AT89C52单片机和超声波换能器实现汽车防撞报警系统的设计 4272次阅读
- AT89C52单片机点亮数码管的设计 4604次阅读
- AT89C52单片机的调频台控制设计 1509次阅读
- AT89C52单片机对八路电压表的设计 1572次阅读
- AT89C52单片机BH1415F调频台的控制设计 3816次阅读
- AT89C52单片机与SD卡实现通讯的设计方案 2795次阅读
- AT89C52单片机智能交通灯的设计 5252次阅读
- 基于AT89C51单片机直流电机PWM调速程序分享 1.6w次阅读
- 单片机at89s52和其他单片机比有什么优劣势 5.2w次阅读
- stc89c52引脚图及引脚功能说明 37.4w次阅读
- 反射式编码器技术实现便携医疗设备设计 3541次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 2开关电源基础知识
- 5.73 MB | 6次下载 | 免费
- 3100W短波放大电路图
- 0.05 MB | 4次下载 | 3 积分
- 4嵌入式linux-聊天程序设计
- 0.60 MB | 3次下载 | 免费
- 5基于FPGA的光纤通信系统的设计与实现
- 0.61 MB | 2次下载 | 免费
- 6基于FPGA的C8051F单片机开发板设计
- 0.70 MB | 2次下载 | 免费
- 751单片机窗帘控制器仿真程序
- 1.93 MB | 2次下载 | 免费
- 8基于51单片机的RGB调色灯程序仿真
- 0.86 MB | 2次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33564次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21548次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6653次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537796次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420026次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191185次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183278次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论