 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
一 项目可行性分析
背景分析:
无人飞行器自主飞行技术多年来一直是航空领域研究的热点,并且在实际应用中存在大量的需求,主要优点包括:系统制造成本低,在执行任务时人员伤害小,具有优良的操控性和灵活性等。而旋翼式飞行器与固定翼飞行器相比,其优势还包括:飞行器起飞和降落所需空间少,在障碍物密集环境下的可控性强,以及飞行器姿态 保持能力高。小型四旋翼飞行器与其它飞行器相比,其优势在于其机械结构较为简单,并且只需通过改变四个马达的转速即可实现控制,且飞行机动能力更加灵活。 另一方面,小型四旋翼飞行器具有较高的操控性能,并具有在小区域范围内起飞,盘旋,飞行,着陆的能力。
因此我们根据四旋翼飞行器的特点,提出了一种数字式飞行控制系统的总体结构。飞行控制计算机是四旋翼飞行器自动驾驶仪的基本组成部件。采用模块化设计思想,设计开发一种基于PIC32 高性能单片机为核心的飞行控制计算机。四旋翼飞行器采用对称分布的结构形式,建立非线性数学模型。通过引入四个控制量,把非线性模型分解并线性化,得出悬停状态下四旋翼飞行器简化的线性模型,采用经典的PID 控制方法,并对数字仿真结果进行分析,验证控制方案的可行性;同时,制作四旋翼飞行器的结构外形和以传感器、飞行控制计算机、执行机构为核心的主体硬件, 在硬件和软件上都要实行其基本功能。
二 项目内容
本项目研究四轴飞行器,实现飞行、采样、数据传输等功能。所涉及到的技术很多,主要有:软件算法、微电子、模拟电子技术、机电一体化和自动控制理论等。所以,项目小组将其分析这个部分,一一攻克。
飞行控制系统理论分析,建立数学模型,硬件选型及原理设计
在研究四旋翼飞行器控制算法之前,首先必须建立飞行器系统的动力学模型。在本章中,首先介绍建模的基本方法:选取影响飞行器运动的关键受力和力矩,再根据相应的物理定律建立飞行器的动力学方程。然后在得到四旋翼飞行器的动力学方程之后,适当的选取控制量,运用控制理论中经典的 PID 控制算法。对飞行器系统进行控制。
2. 软件编程,同时进行硬件搭建
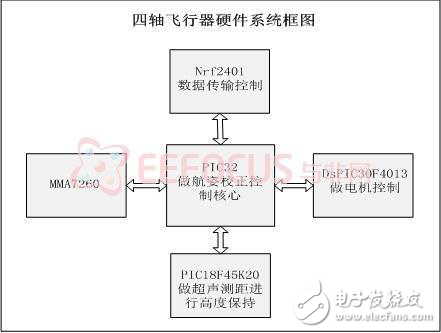
考虑到现实实验室的条件,实用采用以下的硬件方面采用PIC32做航姿校正控制核心,DsPIC30F4013做电机控制,PIC18F45K20做超声测距进行高度保持,nRF2401做数据传输,加速度传感器MMA7260。图1就是该系统框图。
航姿控制控制算法实现:
航姿控制控制算法应该包括姿态控制和航行行为控制。其中空中姿态控制应该是自主完成的,主要包括飞行器的自旋、俯仰、侧倾和高度。
而航行行为控制主要是由操作者通过无线传输对飞行器进行遥控操作的。如果空中姿态能够很好得控制和保持,那么航行行为控制的问题也就迎刃而解了。所以以下重点讨论空中姿态控制问题。为描述方便起见,由下图简单示意,后续描述皆以图为参考:
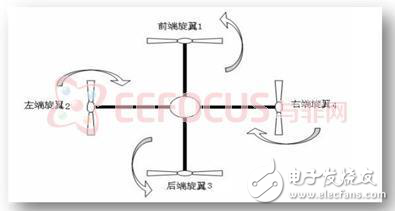
四轴飞行器的一切控制行为都是通过调整四个动力电机的转速来实现的。
首先,为了克服飞行器自旋,必须相邻的任意两电机转向相反;而位置相对的一对电动机转向一致(如上图所示),通过精确调整这两对电机的转速,使其反扭矩相互抵消,在此调整过程中为避免造成飞行器侧倾或俯仰角度发生变化,需同步改变位置相对的一对电动机的转速。
其次,为使飞行器保持水平,需要改变某一个电机的转速,以重新保持水平,而这一调整会引起四个电机反扭矩的不均衡,造成飞行器自旋,故而需要同步调整相对位置的同向旋转的电机的转速,使其重新达到平衡。例如飞行器由于某种扰动造成右倾,此时需要提高电机丁的转速从而增加其升力,而此一行为会造成整个飞行器顺时针力矩增加从而开始自旋,所以在增大电机丁的转速的同时还需要同步减小电机乙的转速,以抵消其增加反力矩。
最后,为了保持高度稳定,需要通过某种手段检测飞行器的实时高度,目前考虑的方案是超声波测距,日后不排除激光测距和GPS的可能性。不过超声测距和GPS的分工不同,超声测距主要负责在0~10m范围内的高度检测,而GPS的精度决定了它只适用于高度较高的情况下保持高度之用。
以上谈到的都是控制的原理,具体手段就需要通过单片机来实现了。如果想达到较好的控制效果,PID算法是必不可少的。同时三种调整过程是需要有机结合在一起组成一个完备的航姿控制算法体系的,三者相互渗透,相互引用,同时作用才能达到目的。譬如保持水平的同时需要随时检测自旋情况,并及时调整。
3. 测试程序,完成飞行器初步功能
4. 进一步修改,以降低飞行器功耗,提高飞行器性能
相关元器件标签:PIC18F45K20 数据手册 , nRF2401 数据手册 , MMA7260 数据手册
背景分析:
无人飞行器自主飞行技术多年来一直是航空领域研究的热点,并且在实际应用中存在大量的需求,主要优点包括:系统制造成本低,在执行任务时人员伤害小,具有优良的操控性和灵活性等。而旋翼式飞行器与固定翼飞行器相比,其优势还包括:飞行器起飞和降落所需空间少,在障碍物密集环境下的可控性强,以及飞行器姿态 保持能力高。小型四旋翼飞行器与其它飞行器相比,其优势在于其机械结构较为简单,并且只需通过改变四个马达的转速即可实现控制,且飞行机动能力更加灵活。 另一方面,小型四旋翼飞行器具有较高的操控性能,并具有在小区域范围内起飞,盘旋,飞行,着陆的能力。
因此我们根据四旋翼飞行器的特点,提出了一种数字式飞行控制系统的总体结构。飞行控制计算机是四旋翼飞行器自动驾驶仪的基本组成部件。采用模块化设计思想,设计开发一种基于PIC32 高性能单片机为核心的飞行控制计算机。四旋翼飞行器采用对称分布的结构形式,建立非线性数学模型。通过引入四个控制量,把非线性模型分解并线性化,得出悬停状态下四旋翼飞行器简化的线性模型,采用经典的PID 控制方法,并对数字仿真结果进行分析,验证控制方案的可行性;同时,制作四旋翼飞行器的结构外形和以传感器、飞行控制计算机、执行机构为核心的主体硬件, 在硬件和软件上都要实行其基本功能。
二 项目内容
本项目研究四轴飞行器,实现飞行、采样、数据传输等功能。所涉及到的技术很多,主要有:软件算法、微电子、模拟电子技术、机电一体化和自动控制理论等。所以,项目小组将其分析这个部分,一一攻克。
飞行控制系统理论分析,建立数学模型,硬件选型及原理设计
在研究四旋翼飞行器控制算法之前,首先必须建立飞行器系统的动力学模型。在本章中,首先介绍建模的基本方法:选取影响飞行器运动的关键受力和力矩,再根据相应的物理定律建立飞行器的动力学方程。然后在得到四旋翼飞行器的动力学方程之后,适当的选取控制量,运用控制理论中经典的 PID 控制算法。对飞行器系统进行控制。
2. 软件编程,同时进行硬件搭建
考虑到现实实验室的条件,实用采用以下的硬件方面采用PIC32做航姿校正控制核心,DsPIC30F4013做电机控制,PIC18F45K20做超声测距进行高度保持,nRF2401做数据传输,加速度传感器MMA7260。图1就是该系统框图。
航姿控制控制算法实现:
航姿控制控制算法应该包括姿态控制和航行行为控制。其中空中姿态控制应该是自主完成的,主要包括飞行器的自旋、俯仰、侧倾和高度。
而航行行为控制主要是由操作者通过无线传输对飞行器进行遥控操作的。如果空中姿态能够很好得控制和保持,那么航行行为控制的问题也就迎刃而解了。所以以下重点讨论空中姿态控制问题。为描述方便起见,由下图简单示意,后续描述皆以图为参考:
四轴飞行器的一切控制行为都是通过调整四个动力电机的转速来实现的。
首先,为了克服飞行器自旋,必须相邻的任意两电机转向相反;而位置相对的一对电动机转向一致(如上图所示),通过精确调整这两对电机的转速,使其反扭矩相互抵消,在此调整过程中为避免造成飞行器侧倾或俯仰角度发生变化,需同步改变位置相对的一对电动机的转速。
其次,为使飞行器保持水平,需要改变某一个电机的转速,以重新保持水平,而这一调整会引起四个电机反扭矩的不均衡,造成飞行器自旋,故而需要同步调整相对位置的同向旋转的电机的转速,使其重新达到平衡。例如飞行器由于某种扰动造成右倾,此时需要提高电机丁的转速从而增加其升力,而此一行为会造成整个飞行器顺时针力矩增加从而开始自旋,所以在增大电机丁的转速的同时还需要同步减小电机乙的转速,以抵消其增加反力矩。
最后,为了保持高度稳定,需要通过某种手段检测飞行器的实时高度,目前考虑的方案是超声波测距,日后不排除激光测距和GPS的可能性。不过超声测距和GPS的分工不同,超声测距主要负责在0~10m范围内的高度检测,而GPS的精度决定了它只适用于高度较高的情况下保持高度之用。
以上谈到的都是控制的原理,具体手段就需要通过单片机来实现了。如果想达到较好的控制效果,PID算法是必不可少的。同时三种调整过程是需要有机结合在一起组成一个完备的航姿控制算法体系的,三者相互渗透,相互引用,同时作用才能达到目的。譬如保持水平的同时需要随时检测自旋情况,并及时调整。
3. 测试程序,完成飞行器初步功能
4. 进一步修改,以降低飞行器功耗,提高飞行器性能
相关元器件标签:PIC18F45K20 数据手册 , nRF2401 数据手册 , MMA7260 数据手册
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- CrazyFlie 避障传感器飞行器 8次下载
- 多旋翼飞行器设计与控制的半自主自驾仪的位置控制 0次下载
- 多旋翼飞行器设计与控制的前景展望 0次下载
- 多旋翼飞行器设计与控制的底层飞行控制 0次下载
- 多旋翼飞行器设计与控制的卡尔曼滤波器 0次下载
- 多旋翼飞行器设计与控制的状态估计 0次下载
- 多旋翼飞行器设计与控制的动态模型和参数测量 0次下载
- 多旋翼飞行器设计与控制的传感器标定和测量 0次下载
- 多旋翼飞行器设计与控制的坐标系和姿态表示 0次下载
- 多旋翼飞行器设计与控制的机架设计 0次下载
- 多旋翼飞行器设计与控制的基本组成 0次下载
- 实体飞行器表面沉积静电分布仿真模型 14次下载
- 四旋翼飞行器的发展现状和飞行控制算法的研究仿真 28次下载
- 一种折叠翼飞行器离筒性能分析 1次下载
- 旋翼式微型飞行器升力系统设计 54次下载
- 基于DSP的无人飞行器飞行控制系统设计 683次阅读
- 基于nRF9E5芯片实现扑翼微型飞行器遥控系统的应用设计 2303次阅读
- 基于ADuC7026微处理器和电机实现Quad-rotor飞行器驱动控制设计 758次阅读
- 浅谈四旋翼飞行器的设计 6674次阅读
- 星翼电子:MiniFly开源四轴飞行器信息描述 2103次阅读
- 工用无人飞行器解决方案详解 1268次阅读
- 基于STM32四轴飞行器电路设计的详细图解资料概述 1.5w次阅读
- 四轴飞行器如何对频_四轴飞行器怎么操作 9.7w次阅读
- 四轴飞行器什么牌子好_十大四轴飞行器品牌排行版 1.6w次阅读
- 基于STM32的简易四轴飞行器系统的设计实现 1.6w次阅读
- 以STM32F4为控制核心的四轴航拍飞行器的设计与实现 8182次阅读
- 四轴飞行器怎么起飞_四轴飞行器原理 4.8w次阅读
- 基于STM32的四轴飞行器电路设计—电路精选(53) 3.9w次阅读
- 教你DIY一个四轴飞行器 7873次阅读
- 基于FPGA的无人飞行器温度巡检装置的设计方案 1128次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1ATmega8芯片中文手册
- 2.45 MB | 3次下载 | 1 积分
- 2VGA 转 HDMI 输出的音视频采集卡LCC385数据手册
- 0.34 MB | 2次下载 | 免费
- 3全志A527系列规格书YNH-830-V1
- 2.39 MB | 2次下载 | 免费
- 4带有集成场效应晶体管(FET) 的3.1V至5.5V输入,3A输出同步降压稳压器TPS51312数据表
- 1.28MB | 2次下载 | 免费
- 5光伏太阳能电池板可编程最大功率点跟踪控制器SM72442数据表
- 373.53KB | 2次下载 | 免费
- 6传感芯片选型指南
- 3.60 MB | 2次下载 | 免费
- 7快速动态响应低噪声 3A LDO稳压器PCD3942 数据手册
- 0.85 MB | 1次下载 | 免费
- 8照明-电源-POE-GEVB评估套件数据手册
- 4.40 MB | 1次下载 | 免费
本月
- 1DC-DC电路(Buck)的设计与仿真
- 0.60 MB | 23次下载 | 2 积分
- 2UHD智能显示SoC VS680产品简介
- 0.46 MB | 11次下载 | 免费
- 3ES9038PRO解码芯片的电路原理图介绍
- 0.25 MB | 11次下载 | 5 积分
- 4采用 Impedance Track™ 技术的宽量程电量监测计BQ34Z100-G1数据表
- 2.7MB | 7次下载 | 免费
- 5东芝BiCD集成电路硅单片TB67S109AFNAG数据手册
- 1.93 MB | 6次下载 | 免费
- 6CR6842 12V/5A 反激式开关电源方案介绍
- 0.10 MB | 6次下载 | 免费
- 7电池管理系统(BMS)软硬件介绍
- 0.23 MB | 6次下载 | 2 积分
- 8TDK电容器产品指南
- 11.88 MB | 6次下载 | 1 积分
总榜
- 1matlab软件下载入口
- 未知 | 935085次下载 | 免费
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420049次下载 | 免费
- 3Altium DXP2002下载入口
- 未知 | 233067次下载 | 免费
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191315次下载 | 免费
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183316次下载 | 免费
- 6labview8.5下载
- 未知 | 81567次下载 | 免费
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73786次下载 | 免费
- 8NI LabVIEW中实现3D视觉的工具和技术
- 未知 | 70088次下载 | 免费





 工商网监
工商网监
评论