在非优化块中,ARRAY 变量不得在字限值处开始。即,在偶数地址的字节处开始。ARRAY 变量将使用....

由于 ASCII 字符为 8 位,而十六进制数只有 4 位,所以输出字长度仅为输入字长度的一半。AS....

WorkVisualAddOnVKR是一个可后续加载的备选软件包,用于配置焊钳和线性滑轨。
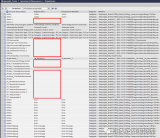
在成功建立在线连接之后,用户界面将随之更改。如果设备不可用,则可以使用一个符号进行标识。下图显示了在....

所有 PROFINET 设备均采用 TCP/IP 协议,因此需要 IP 地址才能进行以太网操作。

要对全局 PLC 变量进行寻址,可以使用绝对地址或符号名称。
接口中包含有块所用局部变量和局部常量的声明。这些变量可分为以下两组。

只能编辑浅灰色存放的文本。
当函数块 (FB) 调用另一个函数块时,可其实例数据存储在调用函数块的背景数据块中。这种块调用又称之....

HMI 系统相当于用户和过程之间的接口。 过程操作主要由 PLC 控制。 用户可以使用 HMI....

大众版KUKA程序使用的程序包括SRC和Dat文件
状态字包含的状态位用于 CPU 控制二进制逻辑运算和设置数字处理。可以查询状态位并只影响这些状态位。
VARIANT 数据类型的参数是一个指针或引用,可指向各种不同数据类型的变量。VARIANT 指针无....
指令“将位序列解析为单个位”用于将数据类型为 BYTE、WORD、DWORD 或 LWORD 的变量....

无论是组成MPI还是RPOFIBUS-DP网络,用到的主要部件都是一样的。

现在,在 S7-1500 CPU 上可使用 STL 中的 MOVE 指令进行编程。

可以使用“ 生成关断延时”(Generate off-delay) 指令将延时所指定的时间 PT 复....

在弹出的DOS 窗口中输入:Ping 空格 PLC IP 地址后回车。在下方的统计信息中看到“丢失”....

在此,可插入函数 (FC) 调用和函数块 (FB) 调用。函数块可作为单实例、多重实例或参数实例进行....
在编程语言 SCL 和 STL 中,如果在块参数中设定了一个 ANY 指针,则任意类型的存储器都可以....
该对话框将显示哪个 MAC 地址分配给了哪个 IP 地址。

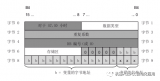
S7-1200 CPU的循环扫描时间(看门狗时间)默认为150ms,最大可修改为6000ms,如图1....

投影变换给四个特征点与校正后的坐标建立关联

已将创建的工艺对象“轴” 分配给脉冲发生器“Pulse_1”并将其参数化为 PTO 。 高速计数器....

打开 TIA V11 并新建一个项目:“S7-1200_OPC”,通过“添加新设备”>“PC 系统”....

该功能块库可以用于S7-300单站通过CP343-1或S7-400单站通过CP443-1进行Modb....

一般铣削 1.吹扫帽切割器 有三种变量可用于启动“KF吹扫” 变量1:(F330) 吹扫是通过“将旋....
F560 激活技术包中的SK1 F129、EZ1/SP1选择,无需开始铣削 F130.EZ1/SP....

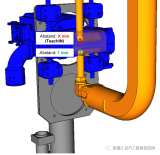
C-50 焊钳上的变压器 C-8000 焊钳上的变压器 第 1 步:切断机器人焊钳电流,释放压力....
WARTE BIS E2200 $LOOP_MSG[]="E2200" $....




 工商网监
湘ICP备 2023018690 号
工商网监
湘ICP备 2023018690 号

