 RT-Thread的邮箱服务,包括邮箱工作机制、工作管理方式以及应用示例
RT-Thread的邮箱服务,包括邮箱工作机制、工作管理方式以及应用示例
前言
前面讲了RT-Thread的信号量、互斥量以及事件集这些都是线程间的同步方式。在我们进行实际的项目开发的时候,经常会涉及到一个线程更新某个全局变量值,然后另外一个线程去读取这个全局变量值,根据这个全局变量值的不同而去执行不同的操作,在RT-Thread 中则提供了更多的工具帮助在不同的线程中间传递信息,包括邮箱、消息队列、信号用于线程间的通信方式。本文将RT-Thread的邮箱服务,包括邮箱工作机制、工作管理方式以及应用示例,基于潘多拉开发板进行实验,单片机为STM32L475VET6。
一、邮箱的工作机制
RT-Thread 操作系统的邮箱用于线程间通信,特点是开销比较低,效率较高。邮箱中的每一封邮件只能容纳固定的 4 字节内容(针对 32 位处理系统,指针的大小即为 4 个字节,所以一封邮件恰好能够容纳一个指针)。典型的邮箱也称作交换消息,如下图所示,线程或中断服务例程把一封 4 字节长度的邮件发送到邮箱中,而一个或多个线程可以从邮箱中接收这些邮件并进行处理。

邮箱工作示意图(来源RT-Thread编程指南)
(1)非阻塞方式的邮件发送过程能够安全的应用于中断服务中,是线程、中断服务、定时器向线程发送消息的有效手段。通常来说,邮件收取过程可能是阻塞的,这取决于邮箱中是否有邮件,以及收取邮件时设置的超时时间。当邮箱中不存在邮件且超时时间不为 0 时,邮件收取过程将变成阻塞方式。在这类情况下,只能由线程进行邮件的收取。
(2)当一个线程向邮箱发送邮件时,如果邮箱没满,将把邮件复制到邮箱中。如果邮箱已经满了,发送线程可以设置超时时间,选择等待挂起或直接返回 RT_EFULL。如果发送线程选择挂起等待,那么当邮箱中的邮件被收取而空出空间来时,等待挂起的发送线程将被唤醒继续发送。
(3)当一个线程从邮箱中接收邮件时,如果邮箱是空的,接收线程可以选择是否等待挂起直到收到新的邮件而唤醒,或可以设置超时时间。当达到设置的超时时间,邮箱依然未收到邮件时,这个选择超时等待的线程将被唤醒并返回 RT_ETIMEOUT。如果邮箱中存在邮件,那么接收线程将复制邮箱中的 4 个字节邮件到接收缓存中。
二、邮箱的相关函数
1、创建动态邮箱函数:创建邮箱对象时会先从对象管理器中分配一个邮箱对象,然后给邮箱动态分配一块内存空间用来存放邮件,这块内存的大小等于邮件大小(4 字节)与邮箱容量的乘积,接着初始化接收邮件数目和发送邮件在邮箱中的偏移量,动态创建一个邮箱对象可以调用如下的函数接口:
1rt_mailbox_trt_mb_create(constchar*name,rt_size_tsize,rt_uint8_tflag);
(1)入口参数:name:邮箱名称。size:邮箱容量。flag:邮箱标志,它可以取如下数值:RT_IPC_FLAG_FIFO 或RT_IPC_FLAG_PRIO(2)返回值:RT_NULL:创建失败。邮箱对象的句柄:创建成功。
2、删除动态邮箱函数:当用 rt_mb_create() 创建的邮箱不再被使用时,应该删除它来释放相应的系统资源,一旦操作完成,邮箱将被永久性的删除。删除邮箱时,如果有线程被挂起在该邮箱对象上,内核先唤醒挂起在该邮箱上的所有线程(线程返回值是 RT_ERROR),然后再释放邮箱使用的内存,最后删除邮箱对象。删除邮箱的函数接口如下:
1rt_err_trt_mb_delete(rt_mailbox_tmb);
(1)入口参数:
mb:要删除的邮箱对象的句柄。
(2)返回值:
RT_EOK:成功。
3、创建静态邮箱函数:这里所说的创建静态邮箱和《RT-Thread编程指南》所讲的初始化邮箱是一样的,跟动态创建邮箱类似,只是初始化邮箱用于静态邮箱对象的初始化。与创建邮箱不同的是,静态邮箱对象的内存是在系统编译时由编译器分配的,一般放于读写数据段或未初始化数据段中,其余的初始化工作与创建邮箱时相同。初始化邮箱时,该函数接口需要获得用户已经申请获得的邮箱对象控制块,缓冲区的指针,以及邮箱名称和邮箱容量(能够存储的邮件数)。函数接口如下:
1rt_err_trt_mb_init(rt_mailbox_tmb,2constchar*name,3void*msgpool,4rt_size_tsize,5rt_uint8_tflag);
(1)入口参数:
mb:邮箱对象的句柄。name:邮箱名称。msgpool:缓冲区指针。size:邮箱容量。flag:
邮箱标志,它可以取如下数值:RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO
(2)返回值:
RT_EOK:成功。
注意:这里的 size 参数指定的是邮箱的容量,即如果 msgpool 指向的缓冲区的字节数是 N,那么邮箱容量应该是 N/4。
4、删除静态邮箱函数:这里所说的删除静态邮箱和《RT-Thread编程指南》所讲的脱离邮箱是一样的,脱离邮箱将把静态初始化的邮箱对象从内核对象管理器中脱离,内核先唤醒所有挂在该邮箱上的线程(线程获得返回值是 RT_ERROR),然后将该邮箱对象从内核对象管理器中脱离。脱离邮箱使用下面的接口:
1rt_err_trt_mb_detach(rt_mailbox_tmb);
(1)入口参数:mb:邮箱对象的句柄。
(2)返回值:RT_EOK:成功。
5、发送邮件函数:线程或者中断服务程序可以通过邮箱给其他线程发送邮件,发送的邮件可以是 32 位任意格式的数据,一个整型值或者一个指向缓冲区的指针。当邮箱中的邮件已经满时,发送邮件的线程或者中断程序会收到 RT_EFULL的返回值。函数接口如下:
1rt_err_trt_mb_send(rt_mailbox_tmb,rt_uint32_tvalue);
(1)入口参数:mb:邮箱对象的句柄。value:邮件内容。
(2)返回值:RT_EOK:发送成功。RT_EFULL:邮箱已经满了。
6、等待方式发送邮件函数:用户也可以通过如下的函数接口向指定邮箱发送邮件:
1rt_err_trt_mb_send_wait(rt_mailbox_tmb,2rt_uint32_tvalue,3rt_int32_ttimeout);
rt_mb_send_wait()与 rt_mb_send() 的区别在于有等待时间,如果邮箱已经满了,那么发送线程将根据设定的 timeout 参数等待邮箱中因为收取邮件而空出空间。如果设置的超时时间到达依然没有空出空间,这时发送线程将被唤醒并返回错误码。
(1)入口参数:mb:邮箱对象的句柄。value:邮件内容。timeout:超时时间。
(2)返回值:RT_EOK:发送成功。RT_ETIMEOUT:超时。RT_ERROR:失败,返回错误。
7、接收邮件函数:接收邮件时,接收者需指定接收邮件的邮箱句柄,并指定接收到的邮件存放位置以及最多能够等待的超时时间。接收邮件函数接口如下:
1rt_err_trt_mb_recv(rt_mailbox_tmb,rt_uint32_t*value,rt_int32_ttimeout);
(1)入口参数:mb:邮箱对象的句柄。value:邮件内容。timeout:超时时间。
(2)返回值:RT_EOK:发送成功。RT_ETIMEOUT:超时。RT_ERROR:失败,返回错误。
三、基于STM32的邮箱示例
光说不练都是假把式,那么接下来我们进行RT-Thread的邮箱实验,采用RTT&正点原子联合出品潘多拉开发板,基于STM32。创建一个邮箱,两个线程,其中一个线程用于发送邮件,另外一个线程由于接收邮件。通过按下不同按键发送不同的邮件内容,根据读取到右邮件内容执行不同操作。当读取到内容为KEY0按下时点亮RGB红灯,其他熄灭,当读取到内容为KEY1按下时点亮RGB蓝灯,其他熄灭,当读取到内容为KEY0按下时点亮RGB绿灯,其他熄灭。
1、实现代码:
1#include"rtthread.h" 2#include"string.h" 3#include"mailbox_app.h" 4#include"led.h" 5#include"key.h" 6 7 8/*线程句柄*/ 9staticrt_thread_tthread1=RT_NULL; 10staticrt_thread_tthread2=RT_NULL; 11 12/*邮箱句柄*/ 13staticrt_mailbox_tmailbox1=RT_NULL; 14 15 16charmailbox_msg_key0_press[]="mailbox_msg_key0_press"; 17charmailbox_msg_key1_press[]="mailbox_msg_key1_press"; 18charmailbox_msg_key2_press[]="mailbox_msg_key2_press"; 19 20 21/************************************************************** 22函数名称:thread1_recv_mailbox_msg 23函数功能:线程1入口函数,用于接收邮件 24输入参数:parameter:入口参数 25返回值:无 26备注:无 27**************************************************************/ 28voidthread1_recv_mailbox_msg(void*parameter) 29{ 30char*mb_msg; 31 32while(1) 33{ 34if(rt_mb_recv(mailbox1,(rt_uint32_t*)&mb_msg,RT_WAITING_FOREVER)==RT_EOK) 35{ 36rt_kprintf("recvmb_msg:%s ",mb_msg); 37 38if(0==strcmp(mb_msg,"mailbox_msg_key0_press")) 39{ 40LED_R(0); 41LED_B(1); 42LED_G(1); 43} 44elseif(0==strcmp(mb_msg,"mailbox_msg_key1_press")) 45{ 46LED_R(1); 47LED_B(0); 48LED_G(1); 49} 50elseif(0==strcmp(mb_msg,"mailbox_msg_key2_press")) 51{ 52LED_R(1); 53LED_B(1); 54LED_G(0); 55} 56} 57rt_thread_mdelay(1); 58} 59} 60 61/************************************************************** 62函数名称:thread2_send_mailbox_msg 63函数功能:线程2入口函数,用于发送邮件 64输入参数:parameter:入口参数 65返回值:无 66备注:无 67**************************************************************/ 68voidthread2_send_mailbox_msg(void*parameter) 69{ 70u8key; 71 72while(1) 73{ 74key=key_scan(0); 75 76if(key==KEY0_PRES) 77{ 78rt_mb_send(mailbox1,(rt_uint32_t)&mailbox_msg_key0_press); 79} 80elseif(key==KEY1_PRES) 81{ 82rt_mb_send(mailbox1,(rt_uint32_t)&mailbox_msg_key1_press); 83} 84elseif(key==KEY2_PRES) 85{ 86rt_mb_send(mailbox1,(rt_uint32_t)&mailbox_msg_key2_press); 87} 88 89rt_thread_mdelay(1); 90} 91} 92 93 94voidrtthread_mailbox_test(void) 95{ 96mailbox1=rt_mb_create("mailbox1",12,RT_IPC_FLAG_FIFO);/*FIFO模式*/ 97 98if(mailbox1!=RT_NULL) 99{100rt_kprintf("RT-Threadcreatemailboxsuccessful ");101}102else103{104rt_kprintf("RT-Threadcreatemailboxfailed ");105return;106}107108thread1=rt_thread_create("thread1",109thread1_recv_mailbox_msg,110NULL,111512,1123,11320);114115if(thread1!=RT_NULL)116{117rt_thread_startup(thread1);;118}119else120{121rt_kprintf("createthread1failed ");122return;123}124125thread2=rt_thread_create("thread2",126thread2_send_mailbox_msg,127NULL,1281024,1292,13020);131132if(thread2!=RT_NULL)133{134rt_thread_startup(thread2);;135}136else137{138rt_kprintf("createthread2failed ");139return;140}141}
2、观察FinSH和执行效果:
(1)输入list_mailbox,可以看到由哪些邮箱,邮箱的容量以及当前挂起等待邮箱内容的线程。
(2)按下KEY0,打印如下邮件的内容,同时RGB红灯亮。
(3)按下KEY1,打印如下邮件内容,同时RGB蓝灯亮。
(4)按下KEY2,打印如下邮件内容,同时RGB绿灯亮。
四、邮箱的使用场合及技巧
邮箱是一种简单的线程间消息传递方式,特点是开销比较低,效率较高。在 RT-Thread 操作系统的实现中能够一次传递一个 4 字节大小的邮件,并且邮箱具备一定的存储功能,能够缓存一定数量的邮件数 (邮件数由创建、初始化邮箱时指定的容量决定)。邮箱中一封邮件的最大长度是 4 字节,所以邮箱能够用于不超过 4 字节的消息传递。
由于在 32 系统上 4 字节的内容恰好可以放置一个指针,因此当需要在线程间传递比较大的消息时,可以把指向一个缓冲区的指针作为邮件发送到邮箱中,即邮箱也可以传递指针,例如:
1structmsg2{3rt_uint8_t*data_ptr;4rt_uint32_tdata_size;5};
对于这样一个消息结构体,其中包含了指向数据的指针data_ptr和数据块长度的变量 data_size。当一个线程需要把这个消息发送给另外一个线程时,可以采用如下的操作:
1structmsg*msg_ptr;23msg_ptr=(structmsg*)rt_malloc(sizeof(structmsg));4msg_ptr->data_ptr=...;/*指向相应的数据块地址*/5msg_ptr->data_size=len;/*数据块的长度*/67/*发送这个消息指针给mb邮箱*/8rt_mb_send(mb,(rt_uint32_t)msg_ptr);
申请结构体大小的内存空间,返回的指针指向了结构体,当结构体中的信息处理完,那么可以将指向结构体的指针作为邮件发送到邮箱中,而在接收邮件的线程中完成对结构体信息的读取操作,在完成操作后应当释放内存,因为收取过来的是指针,而 msg_ptr 是一个新分配出来的内存块,所以在接收线程处理完毕后,需要释放相应的内存块:
1structmsg*msg_ptr;23if(rt_mb_recv(mb,(rt_uint32_t*)&msg_ptr)==RT_EOK)4{5/*在接收线程处理完毕后,需要释放相应的内存块*/6rt_free(msg_ptr);7}
-
操作系统
+关注
关注
37文章
6284浏览量
121874 -
邮箱
+关注
关注
0文章
5浏览量
7769 -
RT-Thread
+关注
关注
31文章
1148浏览量
38867
原文标题:社区新人的RT-Thread学习笔记6——邮箱
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RT-thread内核之邮箱
RT-Thread 架构图
RT-Thread系统的信号如何进行管理和使用呢
怎样去操作RT-Thread系统的消息邮箱呢
浅析RT-Thread中事件集的工作机制
如何将邮箱、消息队列与信号用于RT-Thread线程间的通信呢
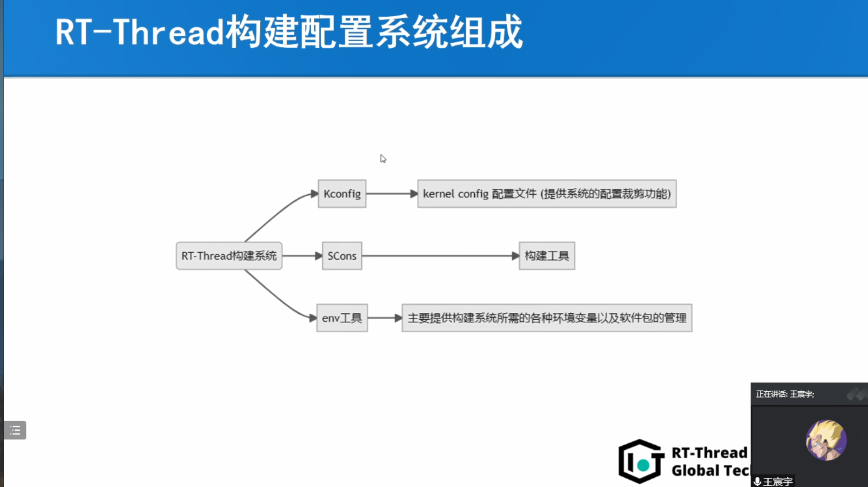
简述Kconfig在RT-Thread系统上的工作机制
有关RT-Thread操作系统中邮箱接口的详细描述
rt-thread 线程间同步和通信你用对了吗

比较一下Freertos和RT-Thread
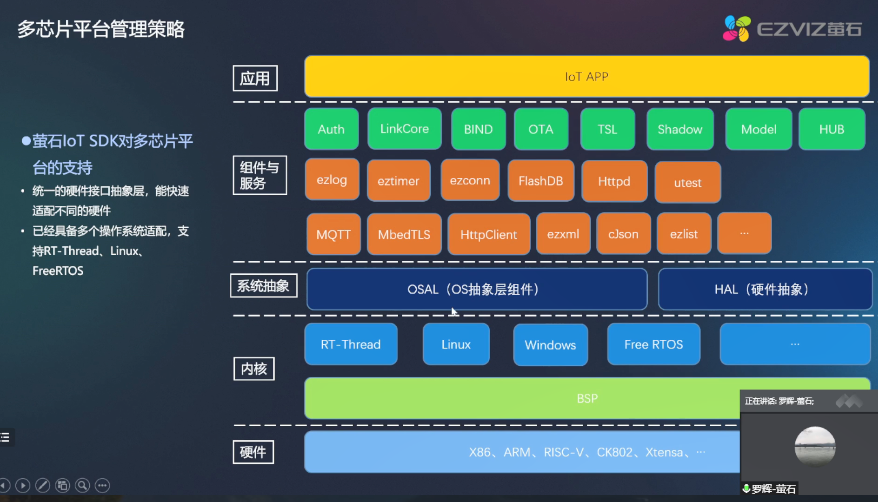
RT-Thread全球技术大会:萤石EZloT SDK对RT-Thread的支持以及多芯片平台管理策略
RT-Thread全球技术大会:Kconfig在RT-Thread中的工作机制
RT-Thread自动初始化机制





 工商网监
工商网监
评论