 2022年见分晓,Mobileye“披露”自动驾驶路线图
2022年见分晓,Mobileye“披露”自动驾驶路线图
Waymo,可能要小心了,因为Mobileye已经盯上你了。
这家在2017年以153亿美元被英特尔收购的以色列公司,除了在今年CES上宣布了一系列的重大合作之外(刚刚,Mobileye发布了一个ADAS新功能),Mobileye还透露了一个数据:目前有近100万辆汽车正在将地图数据传回Mobileye的云平台,此外还有2万辆后装设备车辆。
大约两年前,Mobileye大约有780名员工,而现在仅在以色列总部就有1400人(其中300人来自英特尔),这还不包括其在其他国家和地区的团队人数。
按照计划,Mobileye目前正在耶路撒冷建造一个新办公区,将容纳2500名员工,并正在佩塔提克瓦为“几百名”工程师和数据科学家建造办公室。
明年初,Mobileye将与大众汽车、以色列汽车进口商Champion Motors合作,推出以色列当地首个自动驾驶出租车服务。Champion Motors公司将负责车队运营和控制中心,大众提供车辆,以色列政府共享基础设施和交通数据,Mobileye公司提供自动驾驶系统。
按照计划,车队将在特拉维夫按照预先选定的路线运送乘客,其行驶区域约为11平方公里,这是第一阶段。Mobileye希望到2022年实现的下一步是在公共道路上部署“几十辆”汽车,让它们在目的地之间不受限制地通行。
到2023年,上述服务将扩展到整个以色列。与此同时,在未来四年内(如果一切按计划进行),在美国和中国,Mobileye与其他合作伙伴的无人驾驶测试也将正式启动。
近日,在接受媒体采访时,Mobileye CEO Shashua表示,这些后期的服务部署都不会涉及到配置安全驾驶员,它们将是“真正的”L4级无人驾驶,这意味着它们将在特定条件下以有限的人力投入和监督进行操作。
一、感知系统是前提
但对于L5级无人驾驶——在没有人类司机的情况下可以在任何道路上和任何条件下行驶,这在Shashua看来,目前还不可能。
原因是即使现在市场上最好的系统,有时也会遇到暴风雪和暴雨这样的恶劣天气,Mobileye也不例外。
Shashua表示,“这就是为什么很多自动驾驶部署在像凤凰城这样有着常年好天气的城市进行。”
但这并不是说L5级不可能达到——Shashua认为,在目前的机器学习技术(如强化学习)下,这是有可能的。相反,他说这是一个工程传感器的问题,是否可以可靠地处理雪花、雨滴、雾和其他不可预知的干扰。
比如,目前车载摄像头的问题之一,是在雪地里看不到路的边缘或地标。Shashua预测,随着廉价毫米波雷达和高保真激光雷达的出现,今天的许多自动驾驶挑战将在未来5到10年内被克服。
像AEye这样的公司已经在开发将激光雷达和相机数据融合在一起的系统,而像Luminar这样的初创公司正在设计远程激光雷达传感器,有望大大提升整个感知系统的性能和冗余度。
可以看到,不管是Mobileye还是其他OEM厂商,感知系统在未来几年的成熟度将决定自动驾驶能否在预期时间内商业化的前置条件。
二、必须用商业模式解决高精地图
当然,仅仅提高感知能力并不能打开完全自动驾驶的大门。这就是为什么Mobileye正在与英国地形测量局(Ordnance Survey)等公司合作,建立英国道路的高精度定位数据库,包括在美国、以色列和其他地方。
在以色列,2019年至2020年期间,Mobileye、大众和Champion Motors计划在特拉维夫33公里的公路上收集数据,在接下来的两年内再收集111公里。
Shashua说:“任何一辆商用车都能以几百美元(每辆车每年1美元)的价格安装前置摄像头,持续不断地生成高清地图数据。”这解决了高精地图众包模式的大问题。
高度精确的地图可以为车辆和车队运营商提供收入来源。通过收集自动驾驶和人力驾驶汽车的数据,公用事业公司可以更准确地跟踪井盖、电线杆和灯柱等资产,电信供应商也可以规划建设新的无线和地下网络。
Shashua说:“使用地图来改善商业和城市之间的运营,将有助于我们更接近智能城市和更安全道路的实现。”
在本届CES展上,Mobileye宣布高清晰度众包地图将用于与大众汽车合作开发的高级驾驶员辅助系统。该地图将增强车道保持功能,帮助系统在标记模糊的情况下保持稳定的车道。
此外,Mobileye在2016年就推出的名为“道路体验管理”(REM)的应用通过提取低带宽(每公里10KB)的地标和道路信息,为定位和高清晰车道数据创建了众包实时数据。这部分也被整合到Mobileye云的全球地图中。
三、V2X是后备冗余
本周,中国互联网巨头百度开放了其V2X Apollo智能车辆基础设施合作系统平台的源代码。虽然百度等供应商正在投资于嵌入传感器的道路基础设施,这些传感器有助于无人驾驶导航,但Shashua认为这不是一条短期可行的道路。
问题不在于V2X的有效性尚未得到证明——美国交通部对2004年至2008年的撞车数据进行的一项研究发现,一个全面实施的V2X系统可以解决450万起事故。问题是,它们太贵了。
据美国国家公路交通安全管理局估计,到2020年,单是车辆与车辆之间的零部件成本,估计就在341美元至350美元之间。
Shashua认为,支持自动驾驶的路上唯一需要的部件是交通灯应答器,这是一种小型发射器,可以在车辆安全行驶时向车辆发出无线信号。然后,它们只是作为后备。因为,L4级车辆本身就能在十字路口行驶。
我们可以换个角度看,由于V2X涉及到巨额的道路及通讯基础设施的投入,显然作为企业来说,这是一个不可预期的增强感知,有最好,没有也不能强求。
四、传感器融合是未来
众所周知,近年来不管是激光雷达,还是点云毫米波雷达、红外夜视传感器以及更多创新型的传感器技术都在快马加鞭量产化,但Mobileye仍然坚定地“穷尽”摄像头视觉技术。
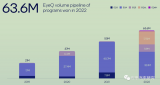
为此,EyeQ系列中最新的定制加速处理器芯片EyeQ5在几周前进行了采样,Shashua预计该芯片将在2019年第一季度“投产”。
该芯片运行专注于感知的专有图像处理算法。7纳米工艺制程的EyeQ5将能够为全自动驾驶汽车执行传感器融合,这要归功于专门用于特定传感器的处理器和用于融合和决策的中央处理器。
截至2017年底,EyeQ系列芯片已在1500多万辆汽车上使用。但这并不是说Mobileye反对集成额外的传感器——恰恰相反,EyeQ5支持毫米波雷达和激光雷达。
Shashua说,虽然公司的重点是视觉,但它致力于在今年上半年建立雷达和激光雷达冗余系统。只不过,我们正在把摄像头视觉处理能力推向极致。
其实,早在2015年,Mobileye就已经与法雷奥签署合作协议,基于法雷奥在自动驾驶完整传感器方面优势,联合EyeQ系列芯片及其特有算法,共同开发适合未来市场的自动驾驶解决方案。
双方合作的重点就是将前置摄像头解决方案与其他传感器融合的系列产品实现产业化。这其中就包含了法雷奥的激光雷达。今年CES展,两家公司再次宣布合作共同开发并推广一套全新的自动驾驶汽车安全标准。
到2020年年中,Mobileye计划开始向合作伙伴提供白盒“子系统”,比如它的环绕计算机视觉套件—360度、12个摄像头、测距300码的视觉系统和多芯片交钥匙解决方案,AV工具包(与其他传感器融合,决策驱动)和地图。
比如,本届CES展上,北京公交集团宣布将把Mobileye的全自动驾驶系统整合到中国公共交通L4级自动驾驶运营中。该系统集成了摄像机、雷达和激光雷达传感器,这些车辆预计将在2022年上路(这极有可能将是北京2022冬奥会的展示项目之一)。
五、如何解决公众信任度
2018年3月,Uber在亚利桑那州坦佩市的一辆沃尔沃XC90改装自动驾驶测试车发生碰撞,造成一名行人死亡,成为整个自动驾驶行业的“典型案例”。
而更多的研究机构民调显示,大多数人并不相信无人驾驶汽车的安全性。尽管出于好奇,部分人会选择去尝试乘坐。
那么怎样才能说服持怀疑态度的公众?Shashua说,答案在于一个数学模型——责任敏感安全(RSS)。
Mobileye于2017年10月提出了RSS。这是一种“常识性”的道路决策方法,它将良好的人类司机驾驶习惯系统化,比如保持安全的跟车距离,让其他车辆有先行权。
为此,Mobileye还在L2+阶段引入了一种自动紧急制动的增强形式——自动预防制动(APB),用于RSS策略的验证。它使用公式来确定汽车何时进入危险状态。这个想法是为了防止碰撞,当潜在危险出现时,让车辆缓慢、渐进地停下来。
Shashua认为,如果APB在每辆车里都安装一个前置摄像头,就可以减少因粗心驾驶而导致的前后碰撞事故。而带有环绕摄像头感应和位置感知的APB系统可以消除“几乎所有”的不必要擦碰。
当然,为鼓励汽车整车厂采用RSS和APB等决策模型,Shashua建议NHTSA等监管机构采用新的评级,为那些配置增强安全系统的新车加分。为此,Mobileye正在建立一个自动驾驶安全标准联盟。
2019年1月15-17日,在上海举办的高工智能汽车年会的闭幕式环节,来自英特尔子公司Mobileye大中华区总经理童立丰将分享《新时代—自动驾驶生态系统的支点》主题报告。
-
Mobileye
+关注
关注
2文章
122浏览量
33657 -
自动驾驶
+关注
关注
773文章
13032浏览量
163203
原文标题:2022年见分晓,Mobileye“披露”自动驾驶路线图 | GGAI头条
文章出处:【微信号:ilove-ev,微信公众号:高工智能汽车】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
未来已来,多传感器融合感知是自动驾驶破局的关键
美国公布3D半导体路线图
大众汽车和Mobileye加强自动驾驶合作
Mobileye与大众汽车深化合作,推动自动驾驶技术发展
发展新质生产力,百度萝卜快跑开启大兴机场的自动驾驶接驳路线


LabVIEW开发自动驾驶的双目测距系统
自动驾驶“十问十答”

农机自动驾驶显示系统组成部分以及配置
Mobileye研究:被低估的Mobileye,重新定义自动驾驶
浅析自动驾驶视觉感知算法

深度解析imec 晶体管和工艺节点路线图

车路协同式的自动驾驶(VICAD)






 工商网监
工商网监
评论