 适用于自动驾驶的底盘线控系统的改造
适用于自动驾驶的底盘线控系统的改造
自动驾驶感知识别、决策规划、控制执行三个核心系统中,和传统汽车零部件行业贴合最近的就是控制执行端,说的再明确一些就是驱动控制、转向控制、制动控制等。自动驾驶的路径规划等驾驶决策是由传感器根据实际的道路交通情况进行识别进而得出,都会是电信号,这就需要传统汽车的底盘进行线控的改造而适用于自动驾驶。
线控底盘主要有五大系统,分别为线控转向、线控制动、线控换挡、线控油门、线控悬挂。而转向和制动则是面向自动驾驶执行端方向最核心的产品,其中又以制动技术难度更高。
图1 面向自动驾驶线控底盘组成

图2 线控底盘组成
一、线控油门
当前线控油门或电子油门技术已经成熟。针对传统燃油车,线控油门现在基本是标准配置,混合动力和电动汽车中都是线控油门,基本不需要换挡,若有也会是线控。
电子油门控制系统经过这么多年的发展,已经不是最初的电机控制节气门概念了,而逐渐发展成为根据油门踏板的位置,ECU来决定节气门的开合大小以及喷油量、喷油时间间隔,早已经完成的电子线控化。

图3 传统油门踏板与电子油门控制系统对比
电子油门主要由油门踏板、踏板位移传感器、ECU(电控单元)、CAN总线、伺服电动机和节气门执行机构组成。油门踏板有一些国内的供应商,但电喷执行机构、ECU(EngineControl Unit)等技术全部掌握在国际零部件巨头中,产业格局稳定,国内企业的参与度不高。
主要供应商:
•Continental
•DENSO
•Magneti Marelli
•Hitachi
•Delphi Technologies
•SKF
二、线控换挡
线控换挡当前技术由传统的机械手动档位变化为手柄、拨杆、转盘、按钮等电子信号输出的方式。线控换挡对燃油车自动变速器的控制方式不会改变,技术难度小,行业格局比较稳定,新进企业有一定机会,但需要与客户深度绑定,该技术对自动驾驶影响不大。
图4 燃油车发动机与变速器控制系统
图5 线控换挡的执行机构形式
线控换挡Gear Shifter机构主要供应商
ZF (Germany)
GHSP(US)
Kongsberg Automotive (Norway)
Stoneridge (US)
Fuji Kiko (Japan)
Dura (US)
南京奥联
重庆青山
宁波高发
图6 线控换挡机构的主要组成
线控换挡技术发展已经发展的非常成熟,未来新能源汽车继续普及,将会是整车标配,有很多的资源可以借助,不会成为技术发展瓶颈。
三、线控空气悬架
当前技术已经比较成熟,受限于成本目前绝大多数应用于高端车辆,与自动驾驶关系不大,行业格局稳定。组成部件主要有:空气弹簧、储气罐、高度传感器、减震器、气泵、电控单元。下面两图能够看到传统车辆的悬挂与空气悬挂的对比,可以看到相对传统悬架,空气悬架增多了汽车电子的控制系统。
图7 传统汽车悬挂
图8 空气悬挂系统
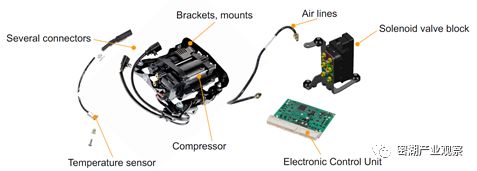
图9 非集成式空气悬挂控制系统
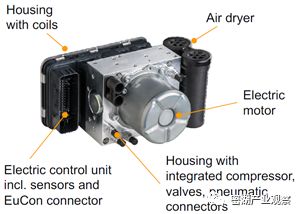
图10 集成式空气悬挂控制系统
对于空气悬挂控制系统,目前大陆已经研发进展到第二代,其集成度相对于第一代产品有了极大的提高,空间更小,该系统的技术壁垒比较大。
空气悬架主要供应商
• ZF (Germany)
• Continental
• Mando Corporation• Thyssenkrupp
• Tenneco
• Magneti Marelli
• Mobis
• Hitachi
• AMK(中鼎股份)
• BWI
线控空气悬架技术成熟,行业格局稳定,且主要是大的零部件供应商巨头在此领域,对自动驾驶的意义不明显,属于非关键部件。
四、线控转向系统
SBW(steering by wire)的发展与EPS一脉相承,其所用到的关键部件在EPS中一样有应用,其系统相对于EPS需要有冗余功能。
目前SBW系统有两种方式:
取消方向盘与转向执行机构的机械连接,通过多个电机和控制器来增加系统的冗余度
在方向盘与转向执行机构之间增加一个电磁离合器作为失效备份,来增加系统的冗余度
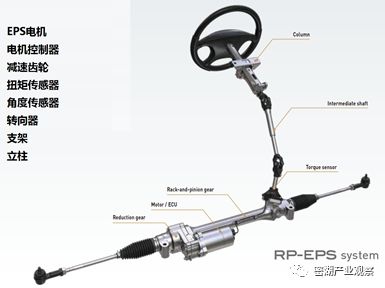
图11 传统EPS系统组成
图12 SBW系统的两种方式
图13 Bosch面向自动驾驶的线控转向系统架构
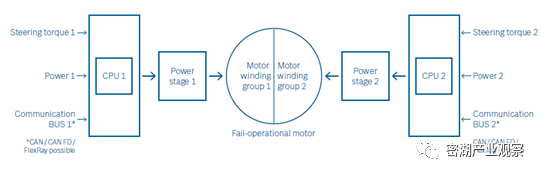
图14 博世SBW的电机冗余备份系统
上图额外解释一句是博世在EPS电机的基础上进行了修改,使电机有两个绕组,同时配备两套电子功率器件控制系统,这样在一个绕组出问题时另外一个绕组可以顶上,这样电机还是可以工作,进而达到的冗余系统的要求。
线控转向技术需要在EPS技术上发展,因此此项技术的参与者绝大多数都是传统的Tier 1 EPS系统供应商。EPS的核心部件:电机、电控、扭矩传感器、角度传感器基本都为各大主机厂内部供应,有很深厚的积累,新厂商切入此领域比较困难。
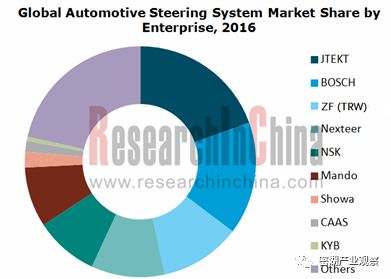
15 2016全球转向系统供应商市场份额

图16 国内2015年转向系统供应商市场份额图

表1 有SBW产品的供应商
线控转向SBW,技术基本掌握在海外的零部件巨头手中,且没有完全成熟,技术多基于之前EPS,进入壁垒非常高。
五、线控制动系统
BBW(Brake by Wire)线控制动系统也分为两种类型:
•EHB: Electro Hydraulic Brake, EHB系统的控制单元及执行机构布置的比较集中,并且使用制动液作为动力传递媒介,有液压备份系统,也可以称之为:集中式、湿式制动系统,发展相对成熟;
•EMB: Electro Mechanical Brake采用电子机械装置代替液压管路,执行机构通常安在轮边,也可称为:分布式、干式制动系统。
BBW系统与传统液压式刹车系统, ABS, ESC等产品的技术积累正相关,属于核心的安全部件,进入壁垒高于转向系统。
线控制动系统是在传统的制动系统上发展而来的,下两图可以看到线控制动系统和传统制动系统的对比。线控制动系统执行信息由电信号传递,相对来讲制动压力相应的更快,进而刹车距离更短更安全,车辆操控性更好。
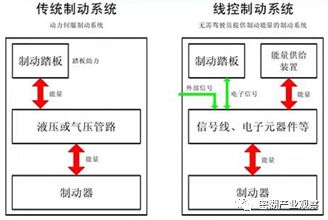
17 传统制动系统与线控制动系统对比
图18 传统制动系统结构图图
图19 传统制动系统与电液制动系统对比与响应时间对比
线控制动系统的优势:
•导线取代冗长的液压管路,制动响应速度快(500~600ms ->100~150ms)
•质量轻,体积小
•无制动液,便于维护
•便于扩展其它电控功能,使用Flexray通讯协议
EHB根据技术方向还分为三类:
电动伺服:电机驱动主缸提供制动液压力源,代表产品Bosch Ibooster, NSK
电液伺服:采用电机+泵提供制动压力源,代表产品Continental MK C1, 日立
以上关键部件包括:电机、电磁阀、油泵、电液控制单元、蓄能器,这些部件集成在一起,形成了机电液集成程度非常高的EHB产品。
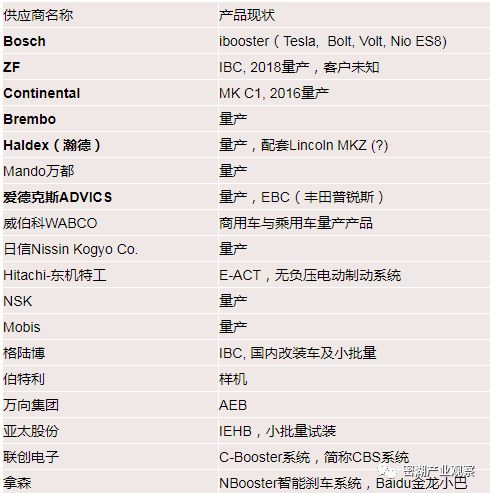
表2 EHB主要供应商
EMB供应商及其产品
EMB技术难点:
1、由于去除了备用的液压制动系统,EMB需要高可靠性,还需要可靠性更高的总线协议
2、制动能量需求比较大1-2kw电机,12V系统比较难负载,42或48V高压系统
3、制动器需要能够耐高温,质量轻,成本低
4、需要更好的抗干扰能力,抵制车辆运行中遇到的各种干扰信号
EMB技术优势:
1、响应时间更短:Brembo号称90ms< Ibooster 120ms
2、体积更小:省去液压管路的体积
3、没有液压系统,不会有液体泄漏

表3 EMB主要供应商
图23 Brembo EMB样机
图24 Siemens VDO EMB样机
图25 瑞典瀚德EMB样机
线控制动,EHB国外厂商技术发展已经比较成熟,但严格意义讲还不适应于L4自动驾驶,国内此项技术在努力追赶;EMB还处在研究阶段,目前看较难有突破。
结语
自动驾驶现在轰轰烈烈的在发展,似乎全球车企都对此产生了焦虑症,担心自动驾驶的产业重构会让企业落后于时代。从执行端来看,线控油门、线控换挡、线控空气悬挂虽然技术都很成熟了,但最为关键的转向和制动系统目前还没有一套可以适用于L4驾驶的稳定的量产产品。
这点上SBW系统好于BBW系统,SBW系统已经看到了博世的样车,虽然有召回Infiniti Q50上至少已经批量装车SBW系统,Nexteer也据说将在2019开始量产其quietwheel产品等。对于适用于L4的BBW系统,虽然博世宣称Ibooster+ESC是可以满足L4的标准,但其还是共用一套液压管路,严格意义上将还不满足冗余度的要求,而EMB的技术更是不知什么时候能够实际装车量产,对于执行端实际技术还有很长的路要走。
-
传感器
+关注
关注
2526文章
48092浏览量
740019 -
自动驾驶
+关注
关注
773文章
13032浏览量
163209
原文标题:面向自动驾驶的线控底盘系统
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
自动驾驶真的会来吗?
细说关于自动驾驶那些事儿
自动驾驶的到来
即插即用的自动驾驶LiDAR感知算法盒子 RS-Box
如何让自动驾驶更加安全?
自动驾驶系统要完成哪些计算机视觉任务?
如何打造自动驾驶「自行车」的呢
线控底盘技术 精选资料分享
中标自动驾驶教育大项目,获海外批量订单 | PIX秘笈分享 精选资料分享
自动驾驶系统适用于哪个领域
自动驾驶中的线控系统综述






 工商网监
工商网监
评论