 使用CNN,密集光流和立体视觉的自主感知演示
使用CNN,密集光流和立体视觉的自主感知演示
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
神经网络
+关注
关注
42文章
4572浏览量
98743 -
赛灵思
+关注
关注
32文章
1794浏览量
130519 -
自动驾驶
+关注
关注
773文章
13032浏览量
163203
发布评论请先 登录
相关推荐
三维视觉测量技术:被动视觉测量和主动视觉测量
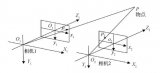
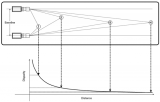
与人眼的立体感知类似,双目立体视觉用两个相机从不同的角度对被测物体成像。依据两幅图像中对应点的立体视差( stereo disparity) ,根据三角测量原理实现三维信息测量。
双目立体视觉是什么样的技术?
双眼视物时,主观上可产生被视物体的厚度以及空间的深度或距离等感觉,称为立体视觉(stereopsis)。其主要原因是同一被视物体在两眼视网膜上的像并不完全相同,左眼从左方看到物体的左侧面较多,而右眼则从右方看到物体的右侧面较多。

计算机视觉中的立体视觉和深度感知Python示例实现
在人工智能和图像处理的迷人世界中,这些概念在使机器能够像我们的眼睛一样感知我们周围的三维世界中起着关键作用。和我们一起探索立体视觉和深度感知背后的技术,揭示计算机如何从二维图像中获得深度、距离和空间理解的秘密。
LiDAR和立体视觉摄像头如何处理弱光、黑暗环境?
立体视觉传感器使用远光灯从 130 米外检测到一块躺在道路上的木材,使用近光灯从 100 米外检测到一块木材。
LiDAR 从最大 50 米外检测到木材。
发表于 11-08 14:53
•184次阅读
LiDAR立体视觉摄像头如何处理弱光及恶劣的天气条件
两种高效的距离传感解决方案,尽管性能存在显着差异,尤其是在恶劣天气和道路条件下。 Nodar是一家为自动驾驶汽车提供先进立体视觉技术的供应商,最近进行了一系列头对头的性能测试,以比较LiDAR和立体视觉摄像头如何处理弱光、黑暗和恶劣的天气条件

LiDAR和立体视觉摄像头如何处理低光
的距离传感解决方案,尽管性能存在显着差异,特别是在恶劣的天气和道路条件下。 Nodar是AV先进立体视觉技术的提供商,最近进行了一系列面对面的性能测试,以比较 LiDAR 和立体视觉摄像头如何处理低光,黑暗和恶劣天气条件,以及检测道路上的
关于双目立体视觉的三大基本算法及发展现状
双目立体视觉一直是机器视觉研究领域的发展热点和难点,“热”是因为双目立体视觉有着及其广阔的应用前景,且随着光学、计算机科学等学科的不断发展

双目立体视觉是什么?单目视觉与双目立体视觉的区别?
双目更多的是基于物理测量,而单目视觉则是基于逻辑推理,通过大量的数据训练,先识别出目标,再根据目标的大小和高度估算距离。因此,单目视觉的漏检率高于双目立体视觉,因为客观上存在corner case。
发表于 08-17 09:40
•2525次阅读

双目立体视觉原理 HALCON的双目视觉系统研究
立体视觉技术是机器人技术研究中最为活跃的一个分支,是智能机器人的重要标志。双目立体视觉是通过对同一目标的两幅图像提取、识别、匹配和解释,进行三维环境信息的重建。其过程主要包括视频捕获、摄像机定标
发表于 07-19 14:18
•0次下载
如何通过立体视觉构建小巧轻便的深度感知系统
在本文中,我们首先介绍了立体视觉系统的主要部分,并提供了有关使用硬件组成和开源软件制作定制立体相机的说明。由于此设置专注于嵌入式系统,因此它将实时计算任何场景的深度图,而无需电脑主机。

双目立体视觉三大算法原理及其代码实现
双目立体视觉中常用的基于区域的局部匹配准则主要有图像序列中对应像素差的绝对值之和SAD(sum of absolute differences)、对应像素差的平方之和SSD(sum of squared differences)及半全局匹配算法SGM(semi—global matching)。
发表于 07-01 09:34
•1242次阅读






 工商网监
工商网监
评论