 美国DARPA支持研发微型机器人,用于救灾或在高风险环境执行任务
美国DARPA支持研发微型机器人,用于救灾或在高风险环境执行任务
美国国防部高级研究计划局(DARPA)宣布将支持若干研究项目,以开发可用于救灾或在高风险环境执行任务的微型机器人。
设想发生自然灾害的场景,例如地震,对建筑物及构筑物、关键设施和基础设施造成广泛破坏,并威胁到人类安全。能在废墟中航行并进入高度不稳定的地区的能力,对于拯救生命或探测残骸中存在的其他危险是非常宝贵的。与机器人合作来评估高风险场景和环境,可以帮助增加成功搜救和开展恢复工作的可能性,同时最小化人类团队可能面临的风险。
“无论是在自然灾害场景、搜救任务、危险环境,还是在其他紧急救援情况下,机器人都有可能提供急需的帮助和支持。”美国国防部高级研究计划局(DARPA)微系统技术办公室(MTO)项目经理罗纳德·波尔卡威奇(Ronald Polcawich)博士说,“然而,对于大型机器人平台来说,有许多环境是无法进入的。更小的机器人系统可以提供重要的帮助,但要缩小这些平台需要在基础技术方面取得重大进步。”
微电子机械系统(MEMS)、附件制造、压电驱动器和低功耗传感器的技术进步,使研究人员得以扩展到微型机器人领域。然而,由于技术上的障碍,这些平台缺乏动力、导航和控制能力来熟练地完成复杂的任务。
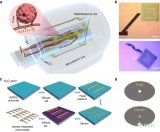
为了帮助克服创建受极端交换(SWaP)限制的微机器人的挑战,DARPA正在启动一个名为短程自主微型机器人平台(简称SHRIMP)的新项目。SHRIMP的目标是开发论证用于自然和关键灾难场景的多功能微型机器人平台。为了完成这一使命,SHRIMP将探索驱动器材料和结构以及蓄电池组件的基础研究,这两者都是创造多用途微型机器人平台的强度、灵活性和独立性所必需的。
驱动器技术可极大影响机器人平台的移动性、承载能力和灵活性等性能。在SHRIMP项目中,研究人员将努力超越目前最先进的技术,开发出优先考虑力的产生、效率、强度重量比以及最大工作密度的驱动器材料和结构。
“驱动器的强度重量比影响微型机器人平台的承载能力和耐久性,而最大工作密度则体现驱动器结构执行高强度任务或在预期时间内工作的能力。”波尔卡维奇(Polcawich)说,“在驱动器结构和材料方面取得重大进展,将极大地影响我们开发能在现场执行复杂任务的微型机器人平台的能力。”
除了先进的驱动器技术,SHRIMP还致力于开发高效的蓄电池组件和功率转换电路。大多数微型机器人平台依靠系绳电缆进行驱动、处理或控制,并受到能源效率低的驱动技术和有限的储能设备的严重限制。由于SHRIMP旨在创造独立运行的复杂微型机器人,因此创造紧凑型电源和转换器可以支持高压驱动机制并显著减少电池消耗变得至关重要。因此,SHRIMP项目将探索能够以几十赫兹频率工作的功率转换器基础研究、具有极高效率以及高能量密度和高比能电池技术。
“微米到毫米尺寸的(机器人)平台为推动开发高效、多功能微电子技术的发展提供了独特的机会,”波尔卡维奇(Polcawich)说,“虽然SHRIMP项目的目标是开发小型、独立的机器人平台,但预计通过我们的驱动器和电源存储研究所取得的成果,可能会对目前受到这些技术挑战限制的许多领域有益——从假肢到光学转向装置。”
虽然先进的驱动器和电源技术将有助于极大地推进该领域发展,但它们只是开发微型机器人挑战的一部分。“极端交换(SWaP)最小化工程是一项多样化的任务,必须考虑这些因素,但也要考虑设计高性能微系统所需的机械、电气和热量因素。”波尔卡维奇说。
研究人员将进一步挑战将基础研究工作与解决工程问题相结合,以开发和演示多功能微型机器人平台,提供无约束的机动性、可控性和灵活性。SHRIMP平台将采用美国国家标准与技术研究院(NIST)机器人测试设施中采用的许多相同原理进行评估,该设备已经适用于微型机器人平台。为了确定潜在的现场效用,每个参与团队将参加严格的评估以测试平台的机动性、在平面和倾斜表面的可控性、承载能力、速度和其他能力。
-
传感器
+关注
关注
2526文章
48092浏览量
740025 -
驱动器
+关注
关注
51文章
7308浏览量
142941 -
机器人
+关注
关注
206文章
27033浏览量
201392 -
低功耗
+关注
关注
9文章
2227浏览量
102666
原文标题:美DARPA支持研发用于救灾与高风险环境的微型机器人
文章出处:【微信号:AI_News,微信公众号:人工智能快报】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器视觉检测解决方案:高风险区域防闯检测
面向狭窄腔道医疗作业的微型机器人
LabVIEW的六轴工业机器人运动控制系统

高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
焊接机器人的核心部件及其功能
机器人的伺服电机控制原理是什么

焊接机器人核心部件有哪些
开发一种用于无创和无线监测系统的自感知AI微型机器人

什么是爬壁机器人 爬壁机器人吸附原理
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
基于宽度神经网络的微型仿鱼机器人运动控制方法






 工商网监
工商网监
评论