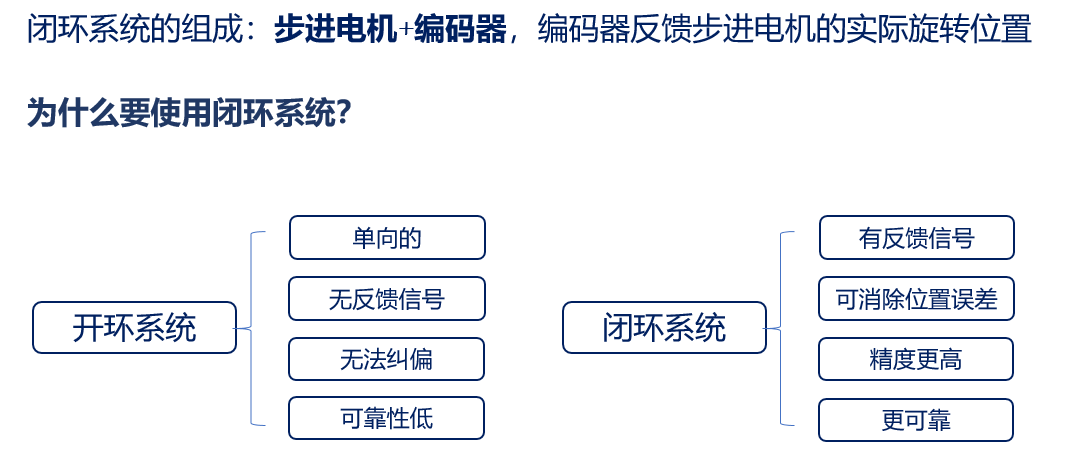
 传统步进电机转型闭环控制
传统步进电机转型闭环控制
但随着伺服闭环控制在高速度,高响应,高精度这“三高”上表现越来越出色,步进电机也开始往闭环控制上发展。越来越多厂商推出一体化闭环电机,填补开环的步进电机和高性能伺服电机中间阶段的空白。当然有人说步进电机没有必要闭环控制,使用时不超过它的允许范围内使用就可以。闭环控制的步进电机肯定有其价值, 它针对那些有高要求但又不至于使用伺服电机的场景, 给市场更多的选择。
闭环控制下步进系统精度提升
首先,大家都知道,步进系统便宜过伺服系统很多。因为其成本低, 在自动控制领域步进系统占有率还是很高的, 但步进系统存在丢步的可能性。虽然有微步驱动可以提高步进电机的准确性, 但微步并不是完全可靠。 有了闭环控制器, 步进系统精度一点不比伺服差了, 只是速度肯定还是没法和伺服比。步进电机配合闭环控制以及光栅尺基本可以实现全闭环控制,免除机械误差。在成本远小于伺服系统的情况下定位精度能达到传统步进电机无法达到的层次。
闭环步进电机不是单纯给步进电机配一个编码器,而是按照伺服电机系统的工作原理进行设计开发。目前最广泛应用的是电机专用DSP芯片,采用32位的DSP做为主处理器,以保证整个系统的高响应和高速,可以做到每隔25微秒就可以调整一次电机的电流,同时也会配置编码器。
Leadshine 42CME系列就是应用最新的电机专用DSP芯片和闭环控制技术。42CME是采用了1000线的增量光电编码器,转矩可以保持在0.2~0.8 N・m。在精度上较普通电机有很明显的提升,步距角可以控制在±0.09°。精度的提高意味着步进电机不再为个别阻力点的安全而降低速度和效率。在阻力点丢失的脉冲,控制器会在阻力点过后自动恢复速度, 并加速补偿回丢失的脉冲。

(图源:Leadshine官网)
步进系统闭环解决丢步与过冲
对于伺服电机来说,在由高速转为低速时,不可避免地要过冲一段距离,然后再纠正。简单点说控制器发一个脉冲给伺服电机时,伺服电机往往不是走一个脉冲,而是走3个脉冲,然后回退2个脉冲。在某些特定运动场合,这种过冲是不允许存在的。恰好的是,步进电机的特点就是不会过冲,结合步进电机自身的特点和伺服闭环的控制方式,在此类运动场合中有很大的应用空间。
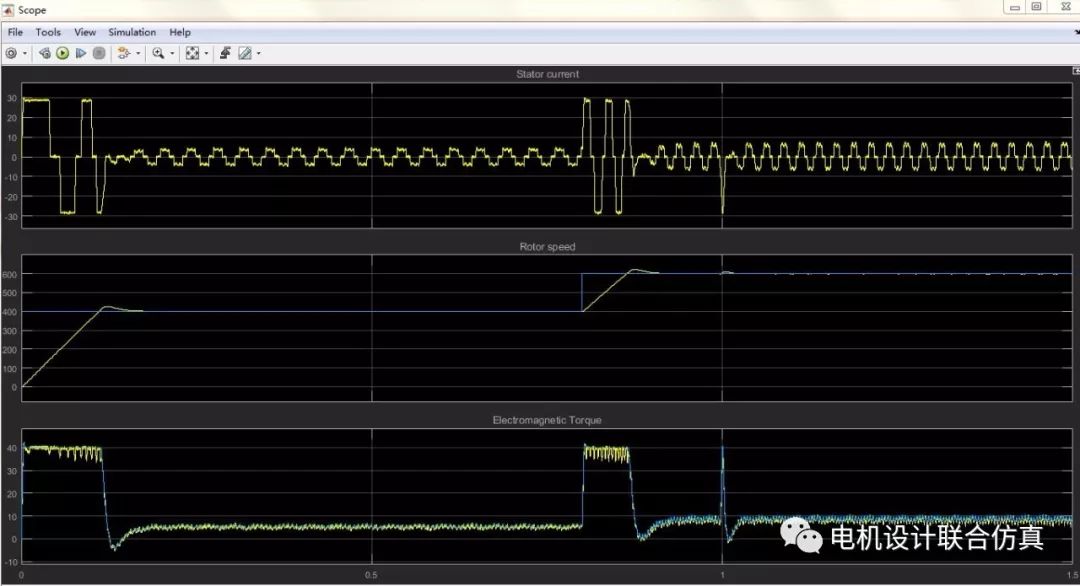
这里可以看一下是全球有名的步进系统制造商日本东方电机。他们着重推的也是集开闭环控制一体的αSTEP步进电机。在位置偏差不到±1.8°工况下,还是采用开环模式,电机运行波形与脉冲指令基本吻合无延迟。在过载位置偏差达±1.8°后,切换至闭环控制对外力影响进行修正。

(图源:东方电机官网)
在标准的42系列里,转矩覆盖0.3 ~0.77N・m。编码器选择的是自家研发的ABZO机械绝对编码器,可以利用电动机轴检测±900 转(1800次旋转)的绝对位置。东方电机推出的号称永不丢步的步进电机在降速曲线不够的情况下, 出现过冲或丢步,电机会自动回位纠正。整过过程中加减速都经过几百级的速度平滑过渡, 不会有任何突然的振动或变化。
小结
市面上其实有很多电机产商也推出不少结合闭环控制的步进电机,这里不一一列举,总的趋势来看步进电机是朝着闭环或者说混合的方向在发展。这种趋势会使步进系统逐渐进入高精度要求的机器,填补开环步进和高性能伺服中间断档的空缺。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
步进电机
+关注
关注
149文章
2929浏览量
146063 -
闭环控制
+关注
关注
0文章
84浏览量
15532
发布评论请先 登录
相关推荐
用foc2.0的库做电机的闭环控制,测出速度值总是跳动为什么?
用foc2.0的库做电机的闭环控制
用编码器做位置速度测量,使用foc2.0自带的速度检测程序,发现测出速度值总是跳动,什么原因呢
发表于 04-26 08:15
变频器闭环控制速度控制精度一般是多少?
我查阅了部分变频器厂商的说明书,在闭环编码器反馈矢量控制时速度控制精度在0.02%,我想着能够做出这么高的精度吗?0.02%这么高的精度,以50HZ两级对电机为例,同步转速1500,如
发表于 02-28 12:16
三相逆变器电压闭环控制仿真
三相逆变器电压闭环控制仿真 一、引言 三相逆变器是电力电子技术中的重要组成部分,广泛应用于新能源发电、电动汽车、工业自动化等领域。电压闭环控制是逆变器控制策略中的一种常见方法,通过对输出电压进行实时
MM440可以做矢量闭环控制吗?
请问高手西门子MM440可以做矢量闭环控制码?
(1)矢量控制算法看起来有点复杂,用的时候需要怎样连接变频器、电机与转速传感器?有几个输入量?
(2)矢量变频+三相异步电动机的机械特性曲线 与 原来
发表于 12-11 07:28


基于Simulink的无刷直流电机BLDC无位置闭环控制
无刷直流电机的有位置传感器控制很多,但是无霍尔闭环控制在Simulink中很少见,通过对Simulink模型的认识,您将对无霍尔控制理解更加深刻
发表于 07-13 09:45
•710次阅读
电机PID控制和闭环控制
电机PID控制和闭环控制 1 PID控制 1.1 位置式PID 理论公式: PID中,P用于提高响应速度,I用于减小静差、D用于抑制震荡。一般在进行PID参数整定时,首先设I和D的值为
发表于 05-06 11:48
•2次下载






 工商网监
工商网监
评论