 基于深度学习YOLO系列算法的图像检测
基于深度学习YOLO系列算法的图像检测
目前,基于深度学习算法的一系列目标检测算法大致可以分为两大流派:
两步走(two-stage)算法:先产生候选区域然后再进行CNN分类(RCNN系列)
一步走(one-stage)算法:直接对输入图像应用算法并输出类别和相应的定位(YOLO系列)
1YOLO算法的提出
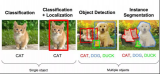
在图像的识别与定位中,输入一张图片,要求输出其中所包含的对象,以及每个对象的位置(包含该对象的矩形框)。
对象的识别和定位,可以看成两个任务:找到图片中某个存在对象的区域,然后识别出该区域中具体是哪个对象。对象识别这件事(一张图片仅包含一个对象,且基本占据图片的整个范围),最近几年基于CNN卷积神经网络的各种方法已经能达到不错的效果了。所以主要需要解决的问题是,对象在哪里。最简单的想法,就是遍历图片中所有可能的位置,地毯式搜索不同大小,不同宽高比,不同位置的每个区域,逐一检测其中是否存在某个对象,挑选其中概率最大的结果作为输出。
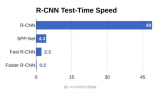
显然这种方法效率太低。RCNN开创性的提出了候选区(Region Proposals)的方法,先从图片中搜索出一些可能存在对象的候选区(Selective Search),大概2000个左右,然后对每个候选区进行对象识别,总体来说,RCNN系列依然是两阶段处理模式:先提出候选区,再识别候选区中的对象,大幅提升了对象识别和定位的效率。不过RCNN的速度依然很慢,其处理一张图片大概需要49秒。因此又有了后续的Fast RCNN 和 Faster RCNN,针对 RCNN的神经网络结构和候选区的算法不断改进,Faster RCNN已经可以达到一张图片约0.2秒的处理速度。
R-CNN系列虽然准确率比较高,但是即使是发展到Faster R-CNN,检测一张图片如下图所示也要7fps(原文为5fps),为了使得检测的工作能够用到实时的场景中,提出了YOLO。
2 算法的简介
YOLO意思是You Only Look Once,创造性的将候选区和对象识别这两个阶段合二为一,看一眼图片(不用看两眼哦)就能知道有哪些对象以及它们的位置。
实际上,YOLO并没有真正去掉候选区,而是采用了预定义的候选区(准确点说应该是预测区,因为并不是Faster RCNN所采用的Anchor)。也就是将图片划分为 7*7=49 个网格(grid),每个网格允许预测出2个边框(bounding box,包含某个对象的矩形框),总共 49*2=98 个bounding box。可以理解为98个候选区,它们很粗略的覆盖了图片的整个区域。
RCNN虽然会找到一些候选区,但毕竟只是候选,等真正识别出其中的对象以后,还要对候选区进行微调,使之更接近真实的bounding box。这个过程就是边框回归:将候选区bounding box调整到更接近真实的bounding box。既然反正最后都是要调整的,干嘛还要先费劲去寻找候选区呢,大致有个区域范围就行了,所以YOLO就这么干了。
边框回归为什么能起作用,本质上是因为分类信息中已经包含了位置信息。就像你看到一只猫的脸和身体,就能推测出耳朵和屁股的位置。
3 算法的结构
去掉候选区这个步骤以后,YOLO的结构非常简单,就是单纯的卷积、池化最后加了两层全连接。单看网络结构的话,和普通的CNN对象分类网络几乎没有本质的区别,最大的差异是最后输出层用线性函数做激活函数,因为需要预测bounding box的位置(数值型),而不仅仅是对象的概率。所以粗略来说,YOLO的整个结构就是输入图片经过神经网络的变换得到一个输出的张量,如下图所示。
4 输入输出映射关系
因为只是一些常规的神经网络结构,所以,理解YOLO的设计的时候,重要的是理解输入和输出的映射关系。
参考图5,输入就是原始图像,唯一的要求是缩放到448*448的大小。主要是因为YOLO的网络中,卷积层最后接了两个全连接层,全连接层是要求固定大小的向量作为输入,所以倒推回去也就要求原始图像有固定的尺寸。那么YOLO设计的尺寸就是448*448。输出是一个 7*7*30 的张量(tensor)。根据YOLO的设计,输入图像被划分为 7*7 的网格(grid),输出张量中的 7*7 就对应着输入图像的 7*7 网格。或者我们把 7*7*30 的张量看作 7*7=49个30维的向量,也就是输入图像中的每个网格对应输出一个30维的向量。参考上面图5,比如输入图像左上角的网格对应到输出张量中左上角的向量。
要注意的是,并不是说仅仅网格内的信息被映射到一个30维向量。经过神经网络对输入图像信息的提取和变换,网格周边的信息也会被识别和整理,最后编码到那个30维向量中。
具体来看每个网格对应的30维向量中包含了哪些信息。
① 20个对象分类的概率
因为YOLO支持识别20种不同的对象(人、鸟、猫、汽车、椅子等),所以这里有20个值表示该网格位置存在任一种对象的概率。也对应为20个object条件概率。
② 2个bounding box的位置
每个bounding box需要4个数值来表示其位置,(Center_x,Center_y,width,height),即(bounding box的中心点的x坐标,y坐标,bounding box的宽度,高度),2个bounding box共需要8个数值来表示其位置。
③ 2个bounding box的置信度
bounding box的置信度 = 该bounding box内存在对象的概率 * 该bounding box与该对象实际bounding box的IOU, IOU=交集部分面积/并集部分面积,2个box完全重合时IOU=1,不相交时IOU=0。
综合来说,一个bounding box的置信度Confidence意味着它 是否包含对象且位置准确的程度。置信度高表示这里存在一个对象且位置比较准确,置信度低表示可能没有对象 或者 即便有对象也存在较大的位置偏差。作为监督学习,我们需要先构造好训练样本,才能让模型从中学习。对于一张输入图片,其对应输出的7*7*30张量(也就是通常监督学习所说的标签y或者label)应该填写什么数据呢。
首先,输出的 7*7维度 对应于输入的 7*7 网格。
① 20个对象分类的概率
② 2个bounding box的位置
③ 2个bounding box的置信度
(请对照上面图6)
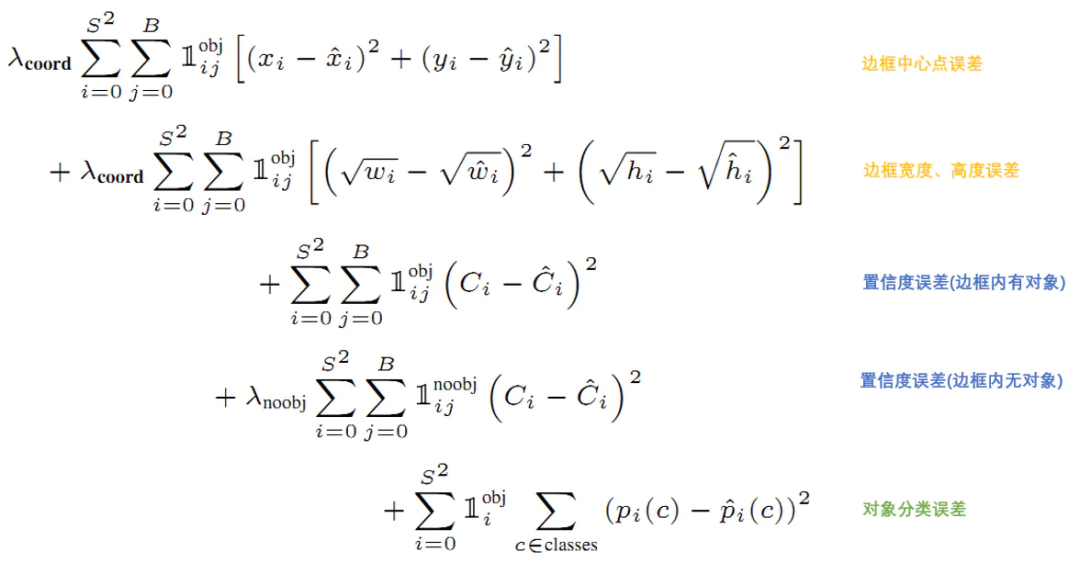
5 损失函数
损失就是网络实际输出值与样本标签值之间的偏差。
YOLO给出的损失函数如下。
6 预测
训练好的YOLO网络,输入一张图片,将输出一个 7*7*30 的张量(tensor)来表示图片中所有网格包含的对象(概率)以及该对象可能的2个位置(bounding box)和可信程度(置信度)。为了从中提取出最有可能的那些对象和位置,YOLO采用NMS(Non-maximal suppression,非极大值抑制)算法。
7 总结
YOLO以速度见长,处理速度可以达到45fps,其YoloV4版本(网络较小)甚至可以达到155fps。这得益于其识别和定位合二为一的网络设计,而且这种统一的设计也使得训练和预测可以端到端的进行,非常简便。不足之处是小对象检测效果不太好(尤其是一些聚集在一起的小对象),对边框的预测准确度不是很高,总体预测精度略低于Fast RCNN。主要是因为网格设置比较稀疏,而且每个网格只预测两个边框,另外Pooling层会丢失一些细节信息,对定位存在影响。
责任编辑:xj
原文标题:基于YOLO系列算法的图像检测
文章出处:【微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
-
算法
+关注
关注
23文章
4455浏览量
90750 -
图像检测
+关注
关注
0文章
28浏览量
11819 -
深度学习
+关注
关注
73文章
5237浏览量
119905
原文标题:基于YOLO系列算法的图像检测
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于深度学习的缺陷检测方案

基于机器视觉和深度学习的焊接质量检测系统
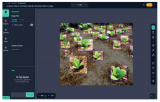
基于YOLO技术的植物检测与计数
目标检测算法YOLO的发展史和原理


深度学习算法简介 深度学习算法是什么 深度学习算法有哪些
基于深度学习算法的一系列目标检测算法
目标检测一阶段与二阶段算法简介





 工商网监
工商网监
评论