 CANOpen系列教程14_协议源码移植 (二)
CANOpen系列教程14_协议源码移植 (二)
1写在前面
该系列教程上一篇文章《协议源码移植(一)》算是对CANOpen移植的准备工作,如果想要理解移植过程的知识,其实还有许多内容得了解。
本文挑一些重点来讲述,从协议源码添加到工程,源代码理解,到最后输出效果。
提示:该系列教程基于:CanFestival架构、STM32F1芯片、FreeRTOS操作系统、Keil MDK-ARM开发环境。
2
添加源码、路径
本节内容针对初学者做出简要描述,相关内容可参看文章《Keil系列教程02_新建基础软件工程》。
2.1 添加组、文件
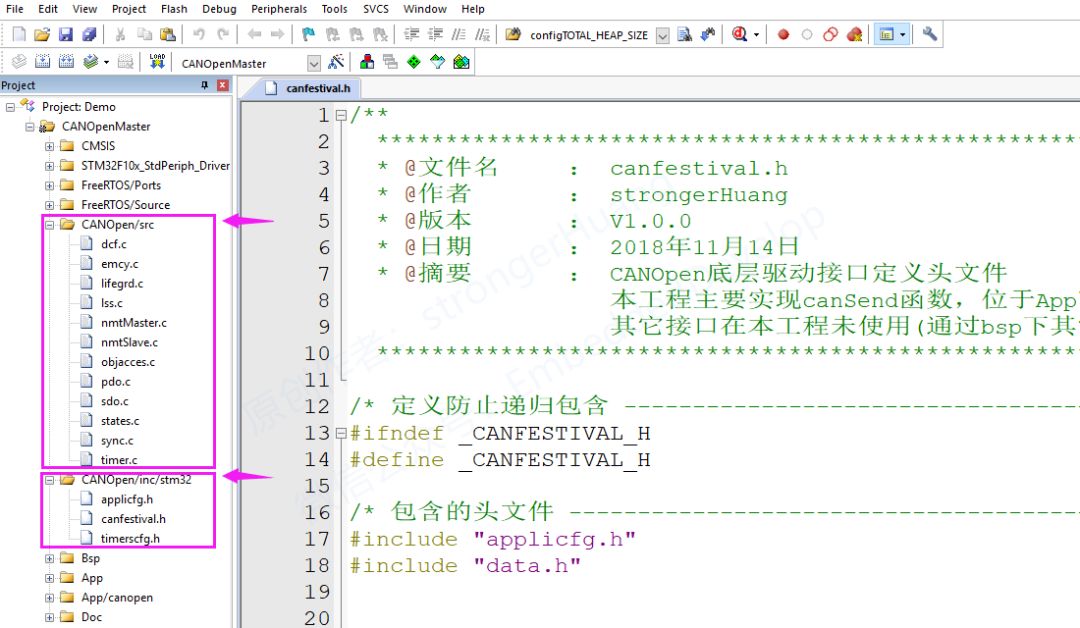
简单来说,就是在你已建好的工程中添加与CANOpen相关的组和文件,如下图:
2.2 添加路径
添加CANOpen源码的inc头文件等相关路径,编译的时候才能找到对应文件。

3
添加代码及分析
移植的重要过程就是添加、删除和修改源代码这一步骤。从教程上一篇文章下载,并看过源代码的朋友就会发现,其实我们需要添加的代码并不多,主要就是需要实现几个底层的驱动函数。
下面将重要的几点罗列出来。
1.修改canfestival.h文件
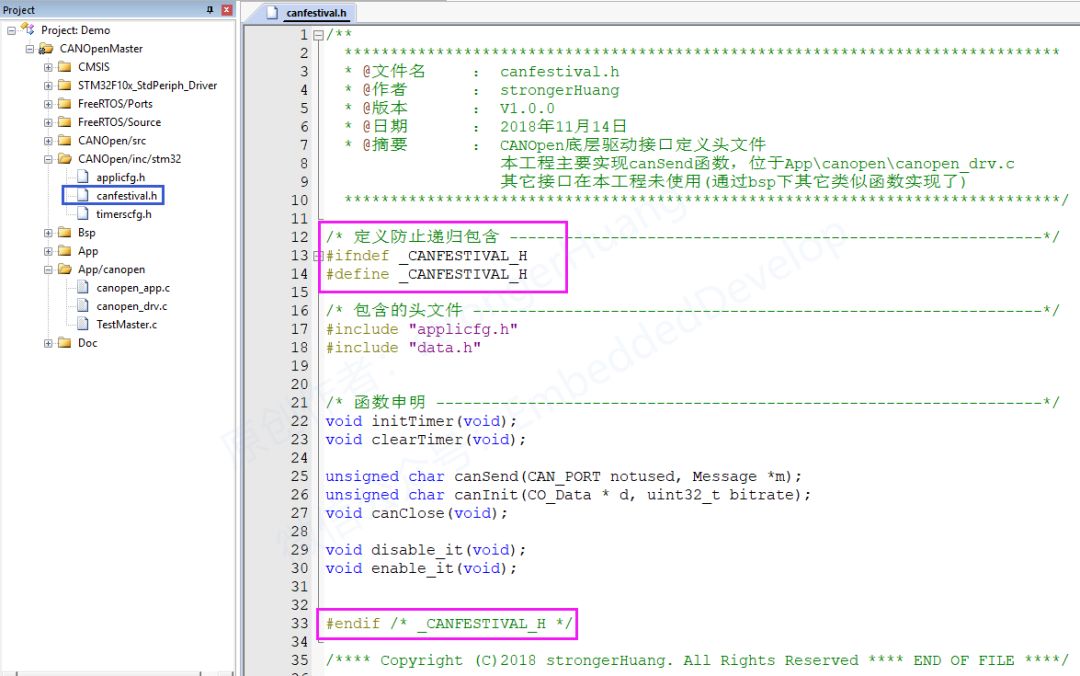
上文说了一下:添加三行语句,防止递归包含。
这里就是CANOpen定义的底层驱动接口,接口函数具体代码需要我们自己实现。
canSend这个函数被CANOpen源代码调用的最多,我们最好不修改函数接口,同时需要我们实现(我在canopen_drv.c中实现的)。
其它initTimer、 canInit等函数接口,在源码中没有调用,我也没有按照这套接口来实现(初始化我在bsp下实现的)。
2.底层驱动初始化代码
上面说的initTimer、 canInit初始化,我这边为了与我代码一致,使用TIM_Initializes、CAN_Initializes替代。
分别位于bsp_timer.c 和 bsp_can.c下面,实现的具体内容这里不描述,具体可以下载源码工程参看。
3.定时器调度相关接口
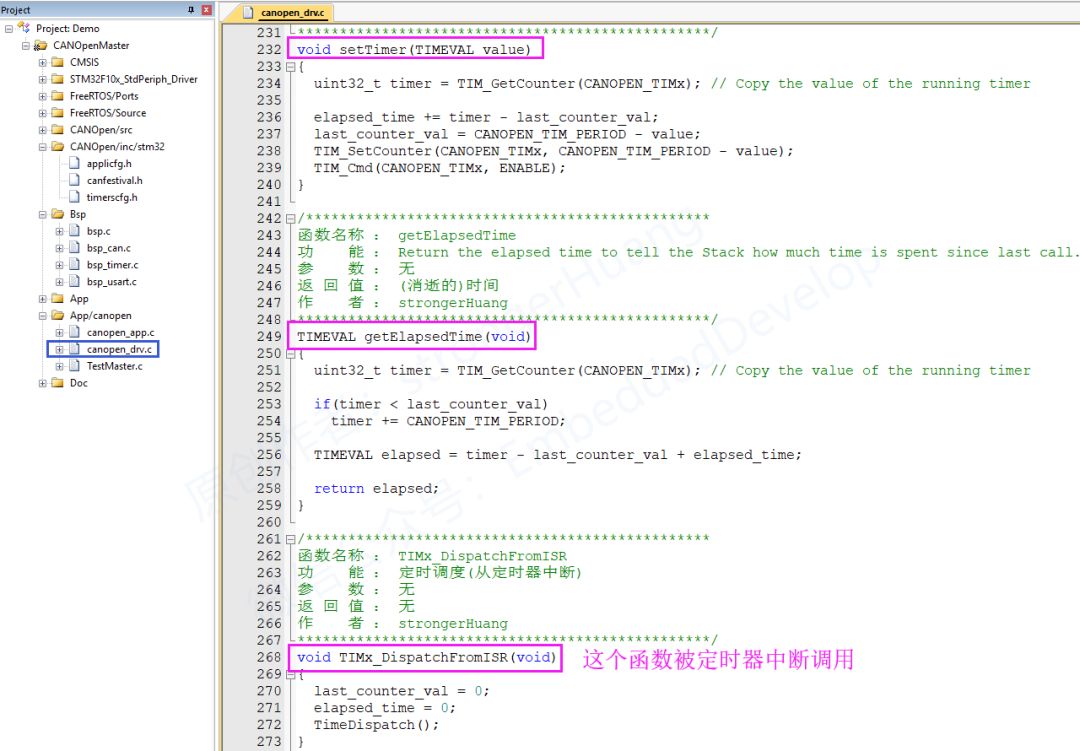
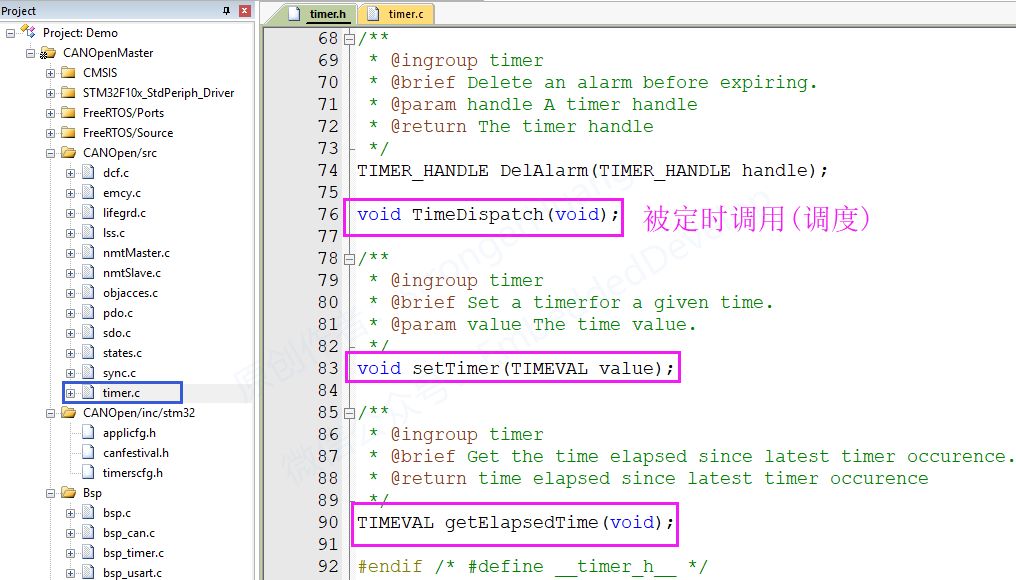
其中setTimer和getElapsedTime这两个函数会被timer.c协议源文件调用。在timer.h里面有什么(如下图),但函数体没有实现,需要我们自己实现。
同时,TimeDispatch函数已经实现,定义在timer.c,但需要被定时调用(调度)。
4.CAN发送接口函数canSend
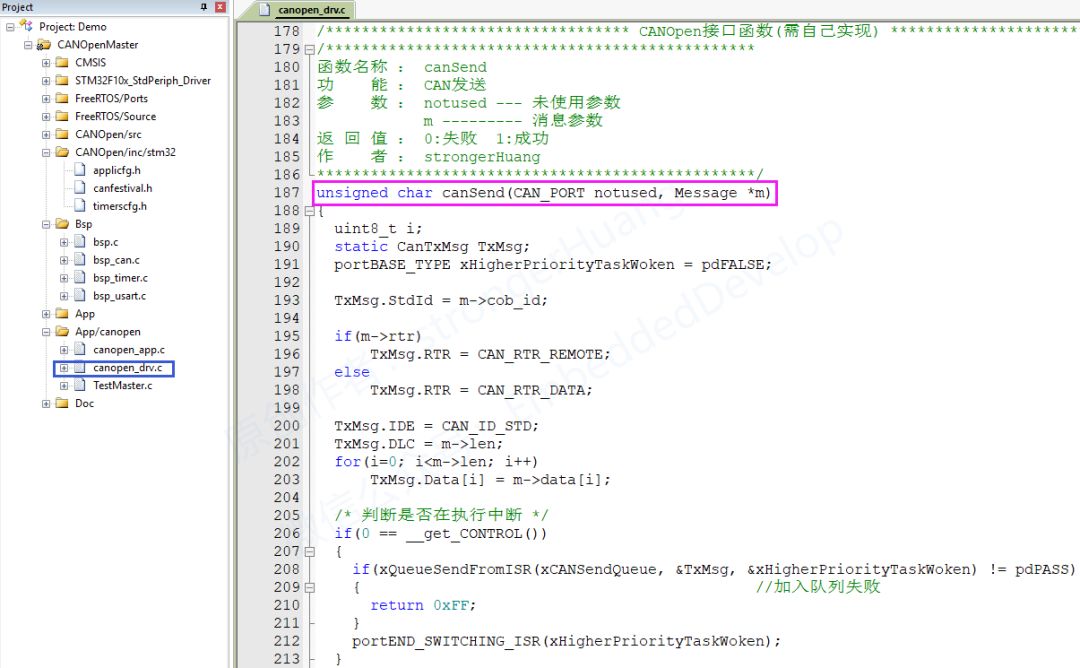
这个CAN发送函数相当重要,接口最好不要自定义,因为scr下面多个源文件都调用了该函数。
同时,发送函数会被定时调度。所以,如果你调度方式像我例程那样,使用定时器中断的方式实现。那么,你就要考虑在中断函数里面发送的情况。
以上就是CANOpen移植,底层驱动相关的一些接口实现和说明。这部分内容,CanFestival框架提供源码是定义在drivers下面,比如STM32F1的就是cm3下面的cm3.c:

我单独提出来实现这些驱动函数是因为我跑了一个FreeRTOS系统。当然,你的驱动也可按照drivers下面那样实现。
5.其它
A.发送和接收缓存
我这边是通过队列来实现发送和接收缓存,而cm3.c是通过MessBuf_Write和MessBuf_Read来实现缓存。
B.中断接收
我使用CAN中断接收数据,和定时器中断调度。
提示:我中断入口函数是宏定义实现的,需要包含宏定义头文件。
#define CAN_RX_IRQHandler USB_LP_CAN1_RX0_IRQHandler
#define CANOPEN_TIM_IRQ_Handler TIM2_IRQHandler

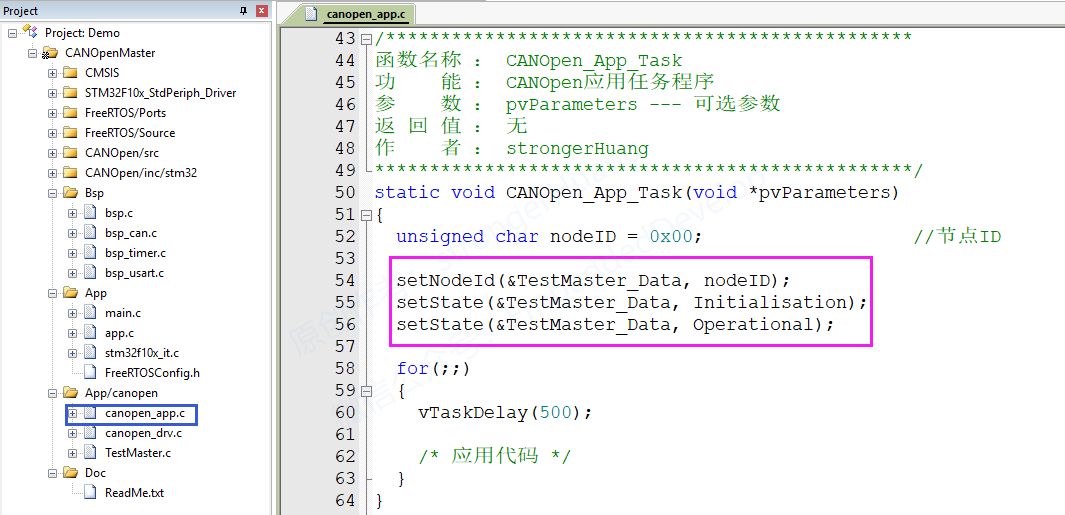
C.配置节点
配置节点ID,节点的状态,这里只是简单的Demo,没有添加应用代码。
4
工程下载及运行效果
1.下载工程“CANOpen工程模板(含主、从站-心跳)”
https://pan.baidu.com/s/1LzD0Epc-Z8vlHsb-sD3WVw
提取码:l2dc
2.运行效果
我提供的例程是一个只有心跳(间隔时间我们配置为1000ms)Demo工程。所以,启动之后,你会发现总线上间隔1秒有一个心跳。
下图是我通过CAN分析仪抓取的CAN总线数据(如果你没有分析仪,可以用我《系列教程6》提供的例程,通过串口打印)

先启动一会儿主站,然后关闭,再启动从站的数据,重要信息我都标记出来了。
A.上线报文:ID:0x700 Data:0
B.网络管理:ID:0x000 Data:00代表管理所有节点 Data:80代表复位节点
C.心跳报文:ID:0x700 Data:05代表Operational操作状态
提示:主站具有网络管理,而从站没有。同时,数据值(如81、05)的含义可参看CiA 301手册网络管理的章节(后期进行讲述)。
-
CAN
+关注
关注
56文章
2467浏览量
459223 -
CANopen
+关注
关注
6文章
200浏览量
42872 -
STM32F
+关注
关注
1文章
40浏览量
18192
发布评论请先 登录
相关推荐
在自动化码头中CANopen与Ethercat协议的应用

在自动化码头中CANopen与Ethercat协议的应用
Profinet协议转换为CanOpen协议来连接CanOpen伺服驱动器的应用
Profinet协议转换为CanOpen协议来连接CanOpen伺服驱动器的应用
智能楼宇系统canopen协议与ModbusTCP协议进行通讯

智能楼宇系统canopen协议与ModbusTCP协议进行通讯
通过CANopen转Modbus TCP网关的伺服系统
工业通讯中CANOPEN转EtherCAT的转换
Modbus转CANopen协议相互转换在工业中的作用
Modbus转CANopen协议相互转换在工业中的作用
Modbus转CANopen协议相互转换在工业中的作用

CANOPEN 转 Modbus 协议网关
CANopen协议编码器

ETHERCAT转CANOPEN连接CANOpen协议
全面的CANopen开发工具——CANopen软件协议栈






 工商网监
工商网监
评论