 天文钟的制作教程
天文钟的制作教程
第1步:收集零件

对于此项目,您将需要以下耗材:
2件11x14(0.093英寸厚)丙烯酸
1 - 1x6板6英尺长。
1 - Arduino Uno
1 - 实时时钟模块
1 - 步进电机28bjy-48
1 - 步进驱动器 - UNL2003
1 - 5伏电源
1 - 36英寸LED灯条
1 - 1/4英寸胶合板 - 2x4英尺
1 - 8毫米金属轴
2 - 608个滚珠轴承
1个黑色泡沫板 - 约12 x 12英寸
其他:电线,木螺钉(#6 x 1 1/4英寸) ),袋装6x32 x 0.75英寸机器螺丝+螺母,另一袋4x40 x 0.75机器螺丝,木材着色剂(可选)
您还需要以下工具:
访问3D打印机
使用能够切割1/4丙烯酸和木材的激光蚀刻机
用于创建时钟案例的表锯+路由器
步骤2:打印齿轮和塑料零件
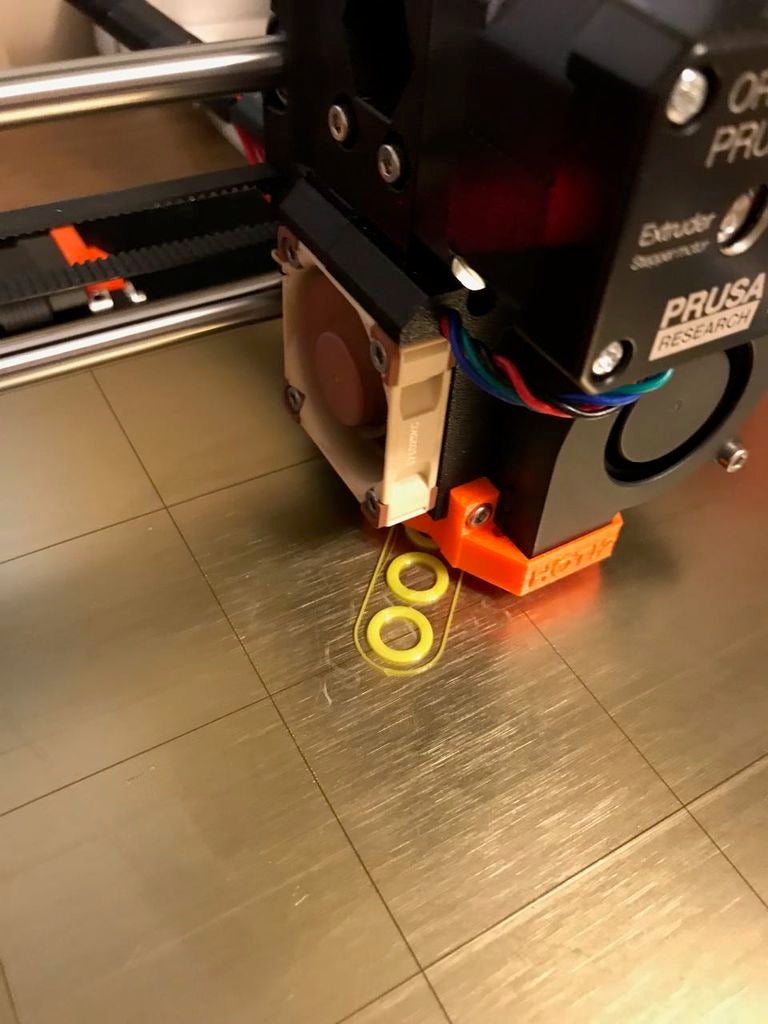

首先,您需要打印时钟的齿轮和塑料部件。我使用了Prusa I3 MK3,Slic3r和PETG作为我的时钟。但是,几乎任何变化都应该适用于该项目。主要的限制是你需要一个大的印刷床来制作板架和72齿齿轮。
这是您需要打印的文件的简要说明:
轴承座 - 轴承座固定两个608轴承以支撑驱动轴。它在时钟上固定在中间板的背面。
耦合器 - 这个塑料件连接板支架和72齿正齿轮。它长25mm,因此设计用于在前板和中间板之间留出两英寸空间的时钟,用于固定轴承。
板支架 - 板支架连接丙烯酸板及其背衬到驱动轴。
轴支架 - 这是一个8mm直径环的文件,用于在轴穿过轴承支架时将轴固定到位。您需要为项目打印其中两个。
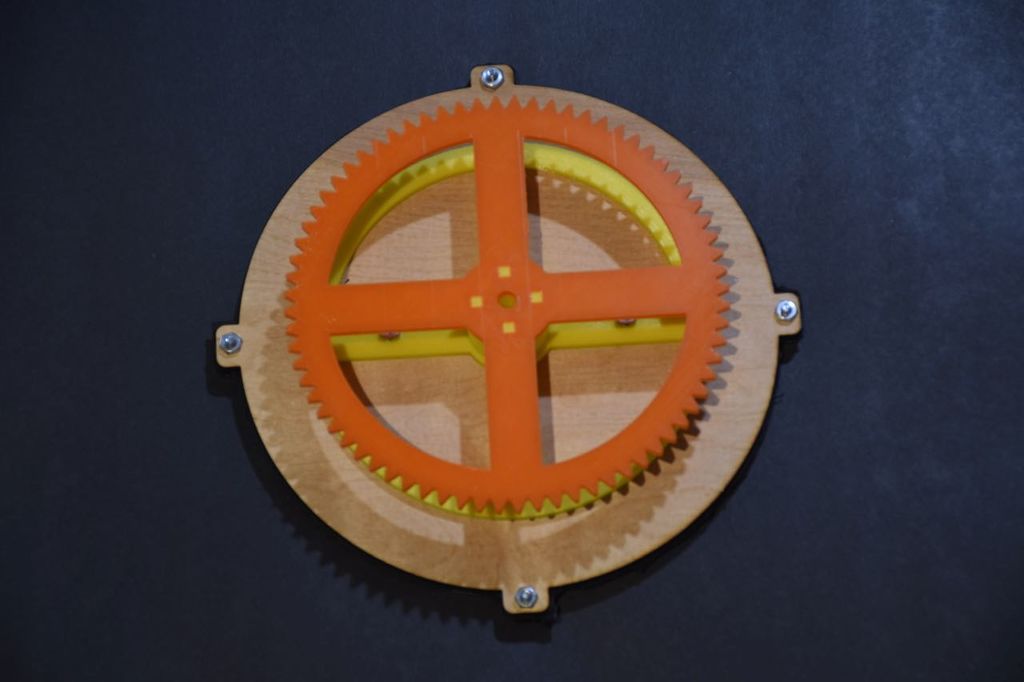
直齿轮(18齿) - 此正齿轮挤压装配在步进电机的轴上。
正齿轮(72齿)。-这个齿轮连接到时钟的驱动轴,转动板架和丙烯酸板。
电机支架 - 用于固定步进电机的板
基本机械设计如上图所示。前板连接到旋转的星图的部分(Rete)。它通过轴连接到72齿齿轮。步进电机(28BYJ48)驱动一个运行时钟的18齿齿轮。电机本身位于电机支架板上,因此可以在时钟的中央板上进行调节。
固定轴的轴承支撑系统用螺栓固定在时钟内的中心板上。使用的轴承是普通的608轴承(外径22毫米,内径8毫米,厚度7毫米),位于轴承支撑件的内侧和外侧。轴与齿轮相连,一切都粘在轴上,将它们固定在一起。
齿轮和塑料零件是使用Fusion 360创建的。我对软件有点新鲜,但附加齿轮生成工具非常适合将它们组合在一起。弄清楚如何使用该软件是我项目的主要目的之一。
您可以在此处访问3d部件的设计文件:Fusion 360天文时钟
步骤3:激光蚀刻丙烯酸部件

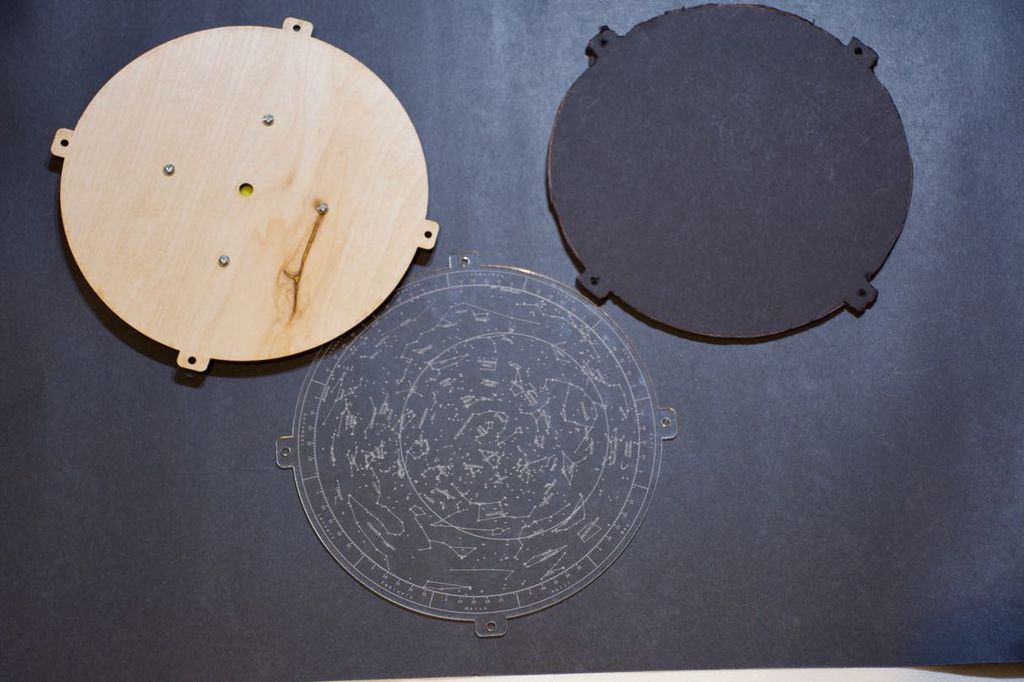
Rete(带有星星的部分)和板(前片)的丙烯酸模板)附在上面。这张星图设置为北纬40度左右,对大多数人来说应该很好。地图本身是使用我在python中编写的软件生成的。
https://github.com/jfwallin/star-project
除非你真的喜欢python编码和天文学,否则我不建议继续挖掘。目前还没有完整记录,但如果你想使用它,它是可用的。我花了很多时间研究星形大小,字体,标签位置等美学问题。结果看起来与任何其他平面球类似,当然其他平面设计也适用于这个项目。
基本上有两类文件:
铭牌 - 印有星图的作品。
rete - 具有您查看星星的窗口的作品通过打印出来。
您不需要打印所有这些内容,但我认为将它们包含在各种格式中可能会有所帮助。
在我使用python代码生成Rete和Plate后,我将其导入Adobe Illustrator以添加蚀刻所需的图形元素。我翻转了星形图,它在丙烯酸的背面蚀刻,使背光看起来更好。
如果你无法使用激光蚀刻机,你可以打印板和Rete在纸上,然后将它们粘在胶合板基座上。它没有发光的丙烯酸外观,但它仍然会是一个很好的时钟,在地幔上向你展示每天星星的旋转。蚀刻金属设计会让时钟呈现出一种很酷的蒸汽朋克外观。
(注意:在拍摄完一些照片后,丙烯酸板模板中有一处更正。)
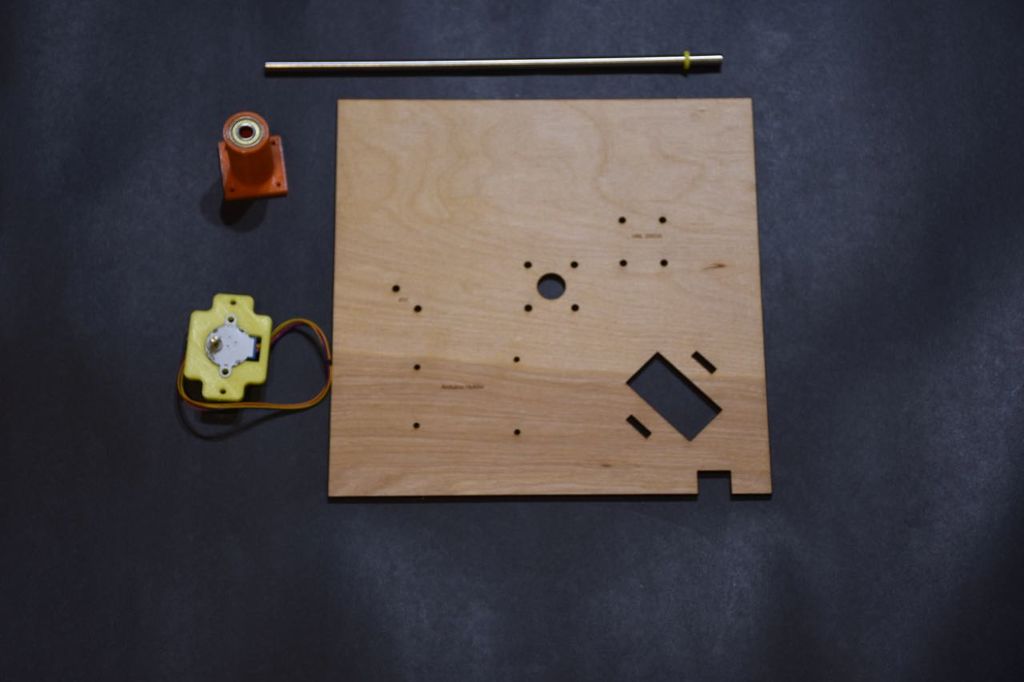
步骤4:激光蚀刻木制零件


用于胶合板零件的Adobe Illustrator文件时钟附在上面。有四个胶合板部件需要激光切割。您可以轻松地使用CNC机器制造这些零件,甚至可以使用台锯和滚动锯切割。你只需要匹配最后一步板和钟前的印刷部件。
钟表背胶合板 - 这只是一块11x11英寸的1/8英寸胶合板,作为后面的时钟。我在上面放了一个明星设计,因为它看起来很酷。
钟表中心 - 胶合板 - 这也是一块11x11的胶合板,但我把它从3/8英寸的胶合板上切下来。它的驱动轴中心有一个9毫米直径的孔。步进电机,驱动轴和时钟电子元件安装在此件上。
时钟前胶合板 - 这是时钟的前端。同样,这是一块11x11英寸的1/8英寸胶合板。它的中心有一个圆孔,还有4个孔,用于将6x32螺丝固定在前面。
钟板式胶合板 - 这种胶合板(1/8英寸)允许您安装有机玻璃板。你最终会在胶合板和丙烯酸树脂之间夹一块黑色泡沫板。这件也安装在3d打印的板架上。
步骤5:组装时钟盒

装有时钟的盒子由一块约6英尺长的1x6木头制成。
基本的想法是制作一个盒子,用于将16x11英寸的木块固定在dado凹槽中。我的盒子尺寸为12英寸,内部尺寸为10.5英寸。所有钟表都需要有三个dado凹槽。对于我的版本,我需要12x6x0.75的木块和10.5x6x1的两块木头。
时钟正面和背面的凹槽距离大约1/2英寸木制件的正面和背面。我在路由器表上使用1/8路由器位来制作这些插槽。在用胶合板检查合身后,我将路由器工作台栅栏偏移了一个微微(以英制单位约1/32英寸),然后再次通过。
保持中心板的中心dado凹槽也在路由器工作台上切割,因为我在胶合板中使用了3/8,我对路由器工作台围栏进行了进一步调整以使更宽洞。在框中的字体板和中心板之间有大约2英寸的空间,因此请相应地调整表格。
对于两次削减,我为每个棋盘做了几次传球。我还跑了几次板,以确保切割干净。
两个侧板的爸爸是全长的。然而,对于较长的顶部和底部部件,我在路由器工作台上使用两个止动块将刀片插入距离木材件的开始和结束约1/2英寸的木材中。基本上,我不希望在外壳的外面看到凹槽。所有凹槽的深度约为1/4,以便固定胶合板。
切割后的碎片,暂时将表壳和粗砂组装在任何可能会伸出的边缘。您还需要从时钟盒的外部部分取下任何锋利的边缘。如果您对表壳感到满意,请取下顶部面板,确保胶合板实际上适合您布置的凹槽。我发现我需要用台锯从板上取下1/8,以便在我创造的盒子里舒适地贴合。
因为这是一个原型,所以我在这个项目的案例中做了几个角落。我用杨树作为我的时钟,但只是因为我的商店里有一块董事会随时可用。樱桃或核桃看起来会更好看。我还使用简单的螺丝接头将它与简单的重叠结构保持在一起。螺钉将位于时钟的顶部和底部,因此当它在壁炉旁的地幔上时它们不会非常明显。 (另外,我提到这是原型吗?)。下一个版本的时钟将使用斜接接头。
步骤6:为时钟组装机械部件


组装时钟的机械部件需要几分钟,但它相对简单。
将星形板,胶合板,72齿正齿轮和塑料板支架连接在一起:
使用胶合板支架作为模板,将一块黑色泡沫芯板切成相同尺寸。我用Exacto刀来制作这件作品,但滚动锯也可以起作用。 (重要提示:请勿激光切割泡沫核心。它会产生有毒烟雾。)
将木制支架置于3d打印的印版托盘上。测量然后钻四个螺孔,使其与塑料托架中的螺孔对齐。使用6x32 1英寸螺栓和螺母将塑料托架固定到胶合板固定器上。在泡沫板上切小孔以容纳螺栓头。
将丙烯酸星形板,带有螺孔的泡沫板和胶合板一起夹在中间。胶合板和丙烯酸星形板上有四个孔。您需要使用6x32 1英寸螺钉将这些部件连接在一起。当然,您需要在泡沫芯板和相应位置的建筑纸上钻一个孔。
将耦合器粘贴到印版载体上。我在标签和孔之间增加了0.1毫米的公差,以确保它适合。
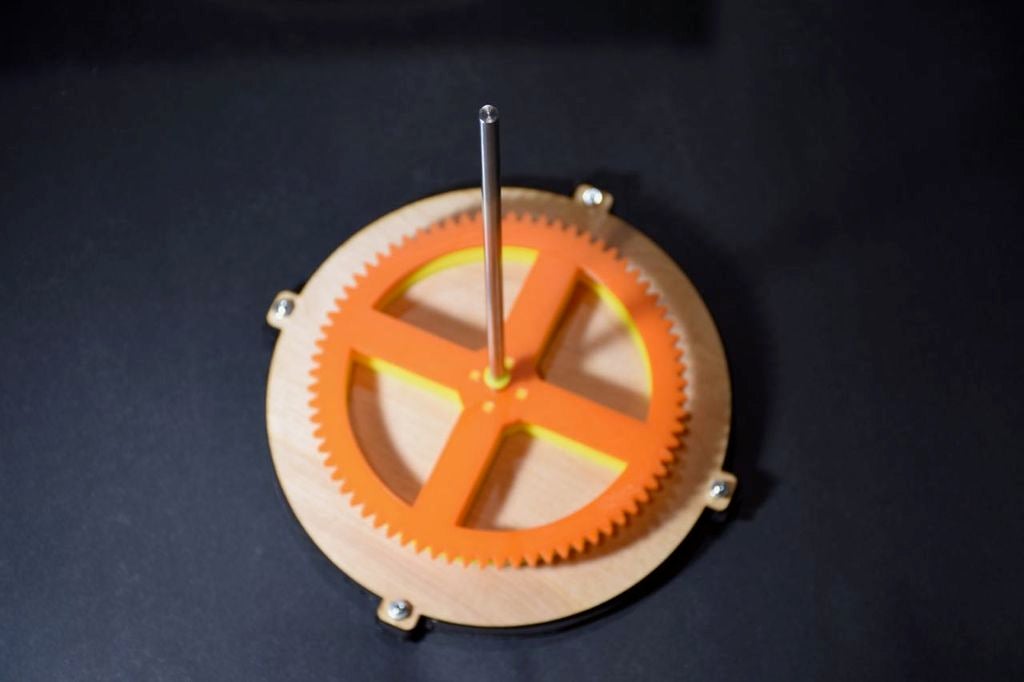
将72齿正齿轮粘贴到托架上。这将完成时钟星形板的组装。我用Gorilla胶水将72齿齿轮,耦合器和板托架粘合在一起。
步骤7:开始组装时钟案例




组装前板:使用4个6x32 1英寸(或甚至3/4英寸)螺栓和螺母将丙烯酸塑料板拧到时钟的胶合板前板上。/p》
添加背光LED灯条:
取下LED灯条并将其固定在时钟的中间板和时钟的前面板之间。 (这可能有助于移除时钟的前板以执行此操作。)。确保条带牢固固定,不会干扰时钟机构或步进电机的旋转。您可能希望使用订书钉或胶水将其固定到位。将胶合板前面装上丙烯酸塑料外壳放入时钟盒中。将带有时钟机构的中间板放入时钟盒中。确保小心地穿过中间板运行LED灯条的电源线。为了做到这一点,在电路板底部放置了一个孔。
步骤8:组装中间板并连接时钟



现在是把时钟的中间盘放在一起的时间。这包括驱动轴和电机的机械支撑,以及项目电子设备的接线。
将轴承座和步进电机安装在中间板上:
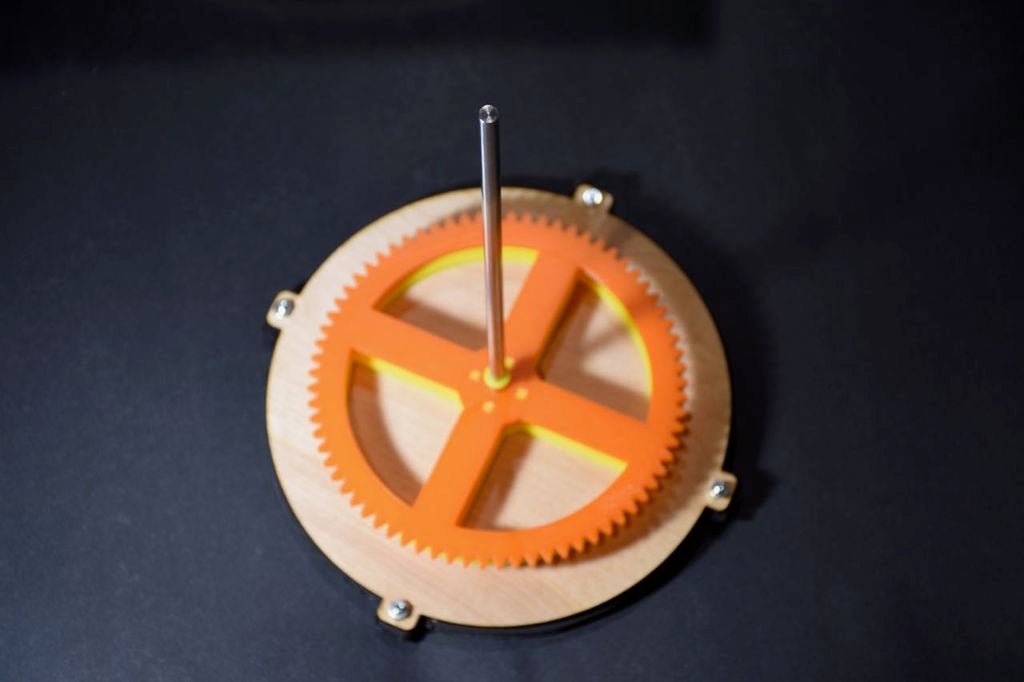
使用两个6x32螺栓和螺母将步进电机安装到中间板上。将电线从步进电机运行到电路板背面。将3d打印轴承固定,并将两个608轴承挤压到支架的前部和后部。如果您的3d打印机稍微关闭,您可能需要调整此部件,但是我设法使用PETG和我的Prusa打印机进行了紧密配合。将支架固定在中间板的背面。将时钟机构组装到驱动轴上:将8毫米金属轴推过72齿正齿轮并穿过塑料孔板,使其紧靠胶合板支架。将8毫米金属轴的另一端穿过中心板和轴承座。将中央板放入盒子中,确保有足够的间隙让星形轮在螺丝后面旋转,将前塑料盒固定到位。测量并标记切割轴的位置,使其适合放入盒子中。在轴承前后,您需要有足够的轴粘在两个轴锁片上。完成此测量后,拆下齿轮/板组件并将轴从轴承座中取出。使用钢锯切割轴,使其完全贴合在机壳内,但也可以从轴承座的后部伸出0.5到1厘米的长度。将轴切割成合适的长度后,将板/72齿正齿轮重新组装到板上并将其粘合到位。在组件后面添加一个轴锁,然后将轴穿过轴承座。重新确认配合后,将轴锁胶粘到轴上。将第二个轴锁定在轴承座后面的轴上。
时钟机构的顺序为:
丙烯酸板
泡沫芯板
胶合板支架
3d打印板支架
耦合器
72齿轮
轴锁
中央支撑板轴承+轴承座+轴承轴锁
轴锁
最后一步,压入18齿正齿轮在步进电机上。调整并拧紧步进电机,使72齿和18齿齿轮啮合在一起并平稳移动。将步进电机螺栓拧紧到位。
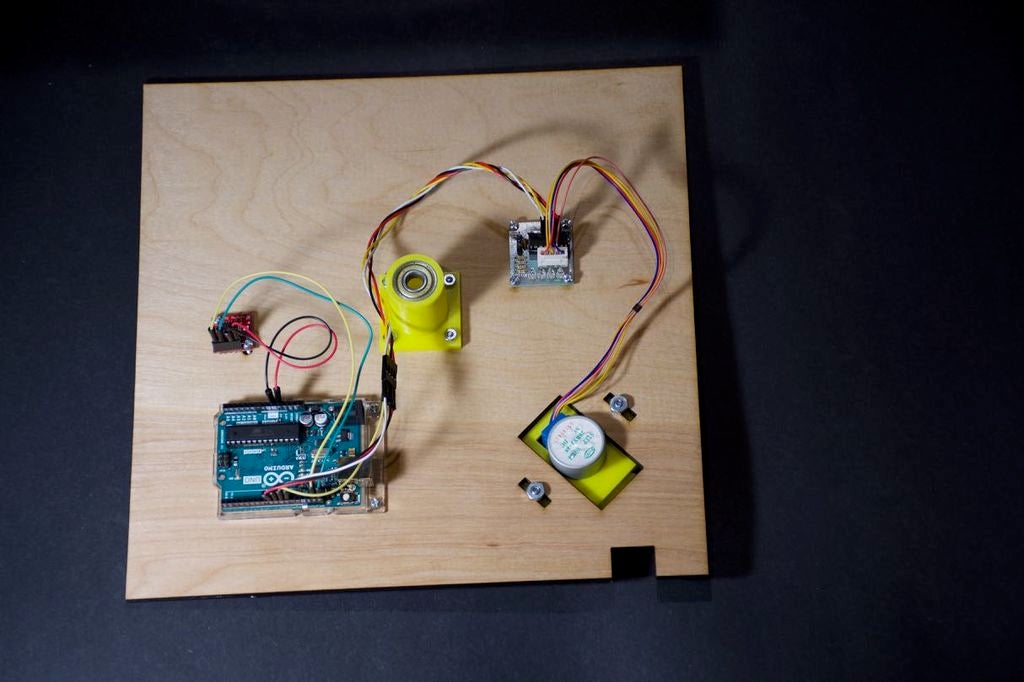
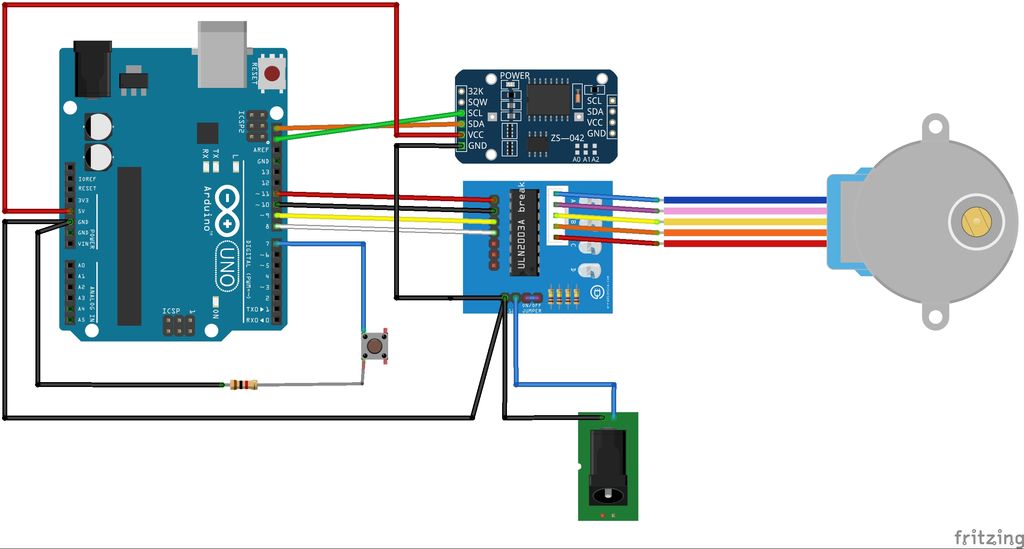
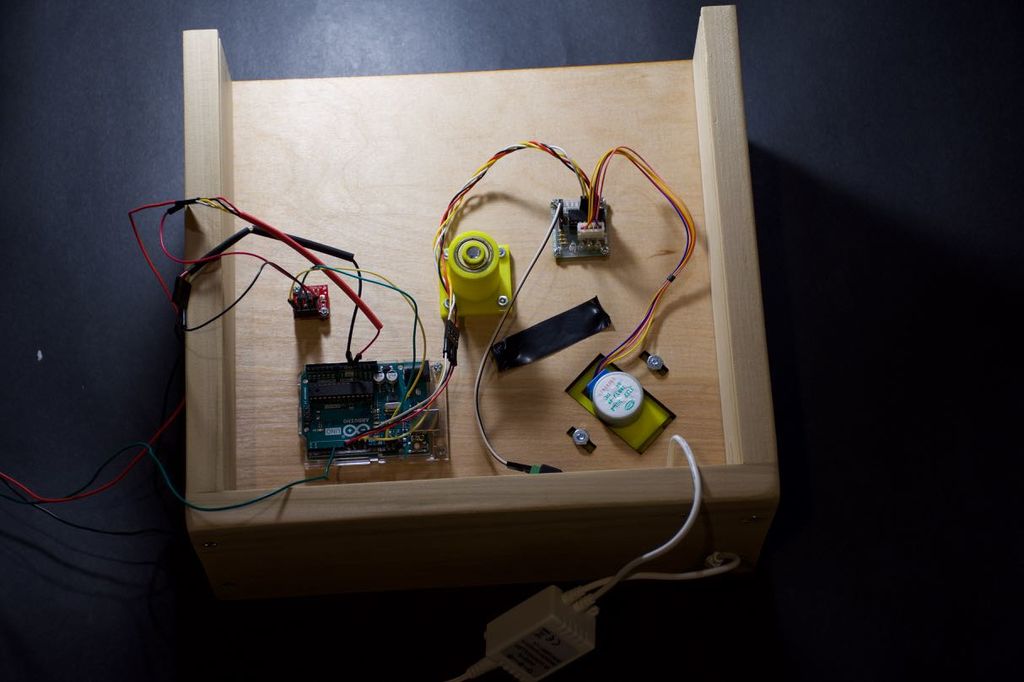
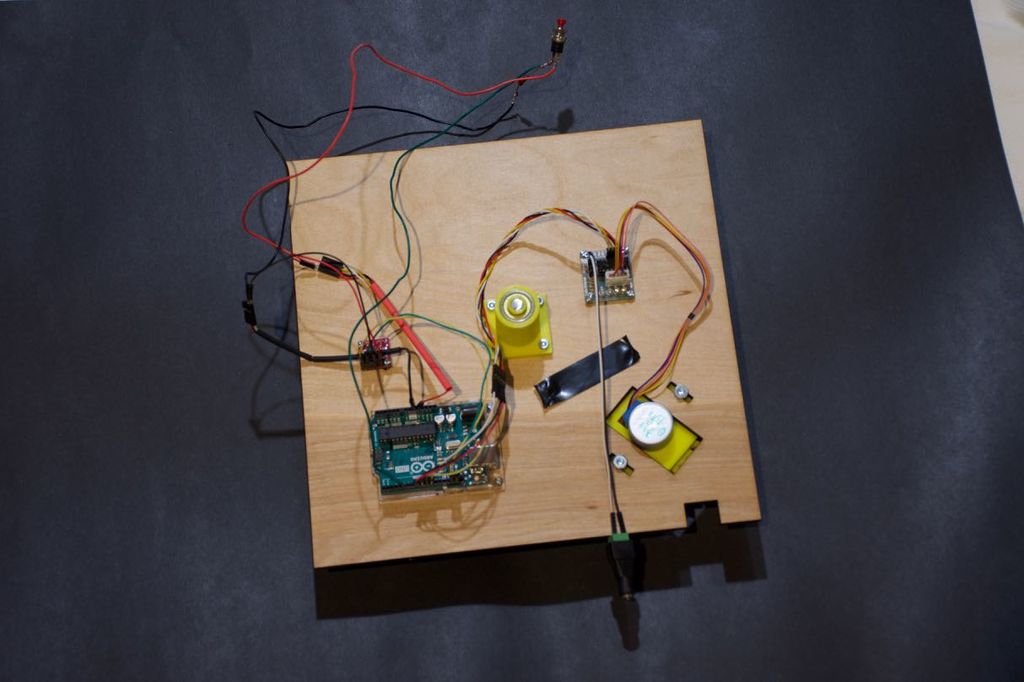
连接电子设备:
时钟接线图相对简单。您需要将实时时钟模块连接到SDA和SCL引脚,以及Arduino上的+5 V和接地。您还需要将UNL2003A步进驱动器上的IN1至IN4引脚连接到Arduino上的引脚8至11,并连接地线。需要在Arduino的地和引脚7之间连接一个开关和一个1k欧姆的电阻。最后,需要将电源连接到UNL 2003A板和5伏电源的Arduino。
以下是一组更详细的说明:
在按钮的一侧焊接电线。将其连接到Arduino上的引脚7。
在按钮的另一侧焊接1k电阻,使输入按钮在未按下时接地。在按钮的另一侧,将其连接到+5伏。/li》
将引脚8,9,10和11之间的四根导线连接到UNL 2003A引脚IN1,IN2,IN3和IN4。
将实时时钟模块上的SCL和SDA点连接到Arduino上的正确引脚。
将Arduino的接地连接到实时时钟模块和UNL 2003A板。
为您的5伏电源(2安培应该足够)创建一个功率分配器,并将其连接到Arduino和UNL 2003A板。
最后,您需要将LED电源连接到时钟的中间层并穿过机箱背面。您将需要LED控制器伸出背面,以便您可以更改时钟上的照明模式。
您需要将+5伏电压连接到步进驱动器并且+6到+ +到Arduino 12伏。我尝试使用单个电源没有成功,但如果我有更多的时间,我可能会使用带有功率调节器的2安7伏系统用于步进器。
确保紧张电机和齿轮之间既不太紧也不太损失。仔细检查一切。当所有接线都已就位且部件已固定好后,小心地将组件滑入到位。
然而 - 请勿连接电源。我们需要先对电路板进行编程!
步骤9:编程Arduino

对Arduino进行编程非常简单。这就是代码的工作原理:
当代码启动时,它会初始化一个步进计数器并从实时时钟模块中获取时间。还初始化了电机的步数,以及有关系统的一些其他变量。
时间从当地时间转换为本地星际时间。由于地球在绕轴旋转时围绕太阳旋转,因此恒星旋转所需的时间比旋转到太阳(平均)位置所需的时间短约4分钟。代码中的Sidereal time子例程已从此站点修改。但是,代码中存在一些错误,因此我更新了使用美国海军天文台创建的完整近似恒星时间算法。
当主循环开始时,它会计算自打开时钟以来经过的时间(以星期几小时为单位)。然后,它会查看当前的步进计数器,并计算应添加的步数,以便时钟的旋转与当前时间对齐。这个步骤被发送到Arduino以移动磁盘。
如果在主循环中按下按钮,则磁盘以更快的速度向前移动。这允许您将磁盘设置为当前时间和日期。电源复位后,时钟不会保留步数,也没有编码器来指示磁盘的绝对位置。我可以在项目的未来版本中添加它。
移动时钟后,系统进入休眠状态一段时间,并重复最后两步。
我用步进器做了一堆实验确保我知道一次旋转需要多少步骤才能完成。对于我的步进器,使用标准的Arduino Stepper库是512 x 4。在代码中,我将RPM设置为1.尽管在设置时钟时速度非常慢,但更高的速度往往会有更多错过的步骤。
步骤10:将其插入并设置时间。






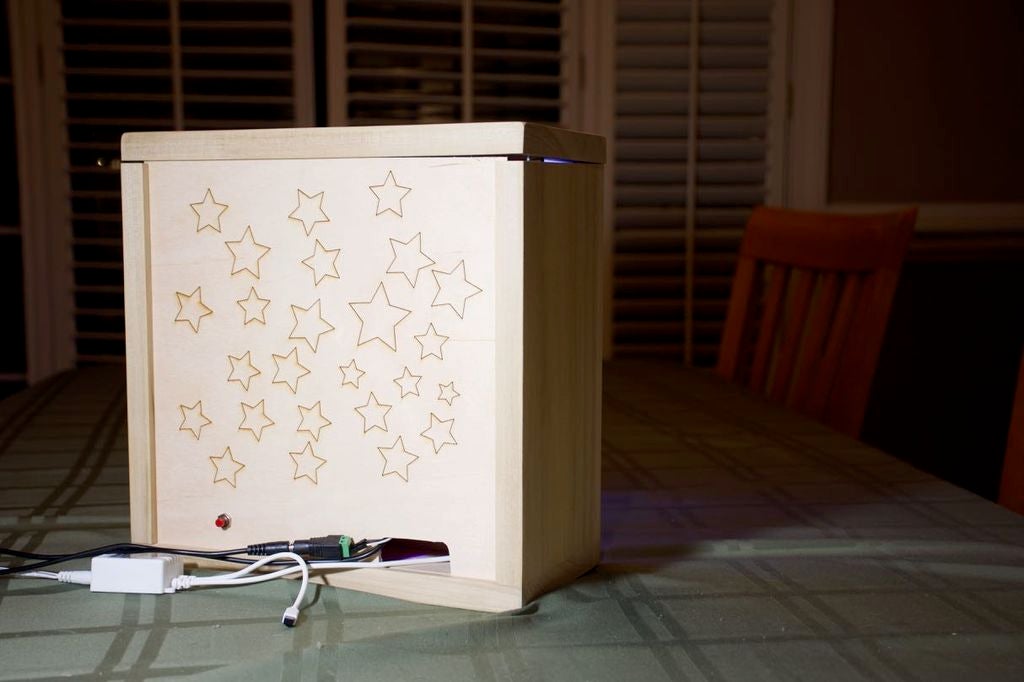
上传代码后,将电源连接到Arduino和步进器。插入所有东西,包括背光。使用遥控器打开灯。
现在您需要按下按钮以对齐时间和日期。只需确保外部塑料rete上的当前时间与内部丙烯酸板上的月和日对齐。恭喜!你有一个天文钟。
一旦设定好时间,你应该每8秒左右从步进器获得一次脉冲以更新星形场。这是一个24小时的慢速旋转,所以不要指望对此采取很多行动。显然,你可以(并且应该!)完成案件。
正如我所说,这是一个原型。我对他的结果感到满意,但我会在下一个版本中稍微调整一下。当我重建它时,我可能会使用NEMA步进器而不是廉价版本。我认为保持力和可靠性会使它们更容易使用。传动装置工作得很好,但我觉得我在设计的齿轮上放了太多的游戏。我可能会以不同的方式做到这一点。
-
时钟
+关注
关注
10文章
1481浏览量
130336
发布评论请先 登录
相关推荐
中国南极昆仑站首度进行近红外天文学观测及全时段近地空间环境监测
【宇宙猜想】AR文创入驻今日美术馆、北京天文馆等众多展馆,在AR互动中感受科技魅力!
软通动力刘天文:数字软通助力辽宁扎实推进新型工业化
用于地面时域天文学的COSMOS
先进的CMOS探测器:开创天文观测的未来
航天文化3D虚拟展览馆的特色之处
LED虚拟制作在电影制作中的重要作用
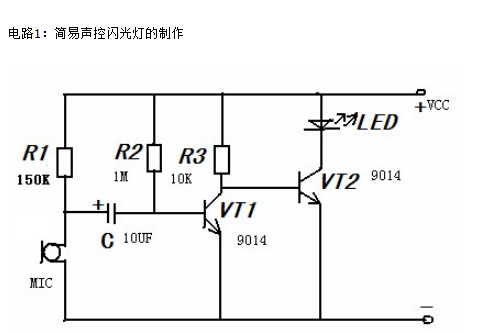
5款电子diy制作电路图

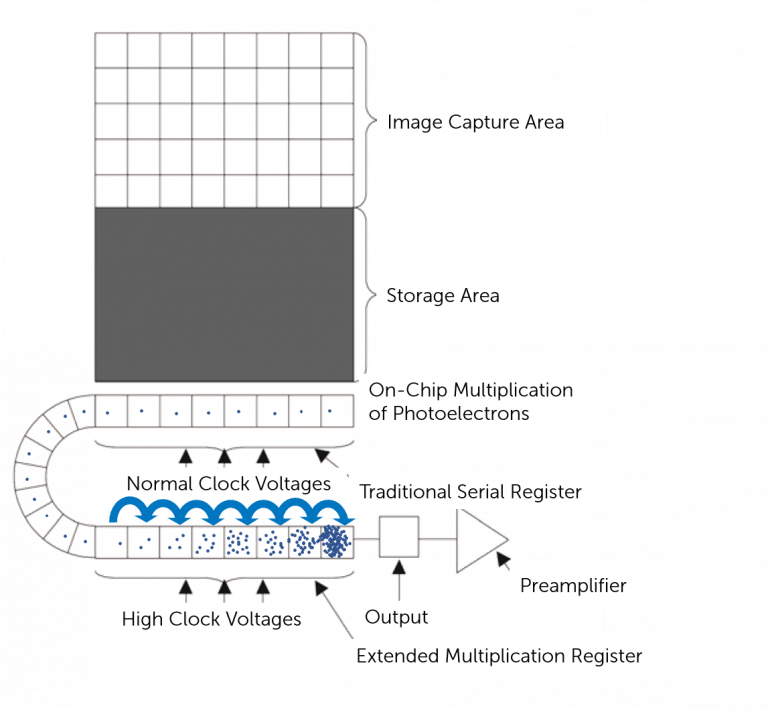
滨松科研级相机天文领域应用案例:太阳成像

滨松科研级相机天文领域应用案例:其他方向

软通动力刘天文:以开源之心,引创新之路





 工商网监
工商网监
评论