 DIY遥控飞机教程
DIY遥控飞机教程
第1步:选择框架

我曾经(也听说过)最好的飞机之一是Mini Talon。然而,我没有为这个项目选择迷你爪,因为它不是一个容易建造的模型,更重要的是,它根本不是一个便宜的模型!
另一个合理的候选人可以是纳米Skyhunter,这是一个小而有趣的飞机。不幸的是,这个框架受到一些空气动力学问题的影响(它可以在尖端失速后开始不必要的平面旋转,并且没有方向舵,不容易保存飞机),因此不建议任何人使用。
有人可能会喜欢传统的飞机设计,机身,中间有几个机翼,后面有方向舵和升降机,前面有一个牵引电机。好吧,我真的不喜欢在这些飞机上拉动电机(fpv)。这并不是因为螺旋桨盘可能位于记录框架的中间,这可能是非常好的。问题是电机(和螺旋桨)在着陆期间会更暴露,更重要的是,有时出现问题。记住,无论出于什么原因,总是有机会放松控制,并且击中某物或某人。使用推动马达可能会损害某些东西或伤害某人。
另一个候选人可能是一个小型三角翼框架,或多或少与纳米天空猎手(80厘米或31英寸)一样大。
我有一些不同的设置:有或没有飞行控制器和FPV齿轮,有小型或大型电机,我不得不说这个概念有几个不错的功能。
首先:它们坚韧且防撞击,你可以轻松地将它们粘合成一个完整的工作状态好几次。我有全油门碰撞,需要一个袋子来收集在球场上传播的所有碎片,但是有很多胶水我总是设法再次飞行它们。
我最后的选择是翼永Z -84框架,这是一个便宜但非常受欢迎的框架,具有良好的动态形状和高效的翼型。我也考虑过了Everyine Blackwing,但Z-84因为它的翼展更大(然后更少的机翼载荷)而领先。此外,一个名叫Mark Qvale的家伙也很欣赏它,你可以相信,如果他对一个框架感到满意,那么这是一个很好的框架。
我建议购买套件版本的飞机和其他特定组件,分别。我不相信PNP飞机不受装配质量和部件质量的影响。我不是说每个PNP飞机都是垃圾,只是我不确定每架飞机都装好组件!此外,我还记得当我在我的PNP纳米天空中放置额外的电子设备时,它会比使用套件 - 插入式飞机更容易。好吧,我不得不承认,使用这种框架选择PNP并不是什么大问题,因为所有东西都将被放置在顶篷中。
对于记录,照片显示了您将使用该套件获得的内容飞机的版本。现在我们必须添加一些其他组件。
第2步:基本组件


为了飞行,你需要其他组件:电机(MT),电子速度控制器(ESC),电池(BT),两个伺服器和一个发射器 - 接收器(TX-RX)系统。
如果你想飞FPV,你还需要一个摄像头(CAM),一个视频发射器(VTX)和一个天线。
最后一个功能,即自主飞行,需要一个飞行控制器( FC)和一个GPS模块。
在照片中你可以看到我用于飞机的东西(我知道,我忘记了相机)。
所有这些组件都是在这些页面(亚马逊,Bangood)。保持页面打开,同时我将继续描述为什么我选择这些特定组件。
MOTOR(MT):为了保持低价我决定使用四轴飞马达。这将是足够好的,我也希望有螺纹电机轴,不需要任何其他东西来固定螺旋桨(“飞机电机”通常有一个光滑的轴,需要一个道具适配器/支架)。常见的2204 2300KV电机是一个不错的选择。 2205或2206电机也可以工作,但没有特别的原因它们会更加沉重和昂贵。您可以/将尝试减少KV,以便使用更大的道具而不会使ESC或电池过载。更大更慢的道具效率更高,但你必须处理你的框架可用空间。
ESC :这个组件从电池获取电能并将其送到电机,具体取决于在收到的信号上。没有理由在这里变大,12Amps足以毫无困难地飞行,30Amps允许无限制的垂直飞行。我将保持良好的平衡,20A ESC可以为循环和其他杂技手段提供充足的动力。我还将测试用18650锂离子电池制造的DIY电池,这也是我不希望预测电流消耗高于20A的另一个原因。
一个重要的ESC功能是它的BEC,电池消除电路。它基本上是一个电压调节器,可以为RX,伺服器和其他电子设备提供合适的电压。 BEC是相关的,因为大多数专家都认为伺服系统应该由专用电路供电,该电路不能为FC和/或RX供电。
你知道,狗屎发生了,如果伺服器出现问题,它通常会消耗很多电流(掉电)。
这个电流量可能很容易超过可以提供的量由BEC,因此坏伺服可以“窃取”其他组件的电源。如果FC在相同的电源轨上,可能会因低电压而被强制复位,因此在空中解除模型,并会发生很多坏事。另一方面,如果你有一个单独的BEC,那么停电还是会迫使你进入紧急着陆,或者可能是撞车,或者你可以恢复飞机,谁知道呢?无论如何,无论如何,OSD,GPS,遥测和蜂鸣器都将保持在线状态。很明显这有多大,以防万一你必须在一个未知的地方,在米,米以外的地方搜索你的飞机。
无论如何,由于这架飞机只有两个伺服,因为建议的FC有它的拥有(相当大)的BEC,机会并不那么糟糕。如果没有BEC,你将获得几克选择“opto”ESC,但imho不值得冒这个风险。我会选择BEC ESC,我会找到其他安全方法来保证几克。
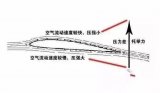
PROPELLER:迄今为止我发现的最佳折衷方案是Dalprop 5046C三刀片。两个刀片6040或6030可以提供更高的效率,但它们将非常靠近框架(见下图),这会产生噪音。这不是“大声熄灭空中客车”,但它肯定是响亮的,当我在高尔夫俱乐部和其他安静的地方飞行时,我宁愿保持低调。无论如何,这只是个人选择。你不能进一步将直径增加到7“或更多,你会碰到框架。你可以减少支柱直径,但你会失去效率。效率很高。无论如何,5050到4045之间的道具应该得到如果你手边只有四个支柱,你仍然可以使用它们。
我还没有建立一个马达/esc/螺旋桨试验台,它按计划进行,但现在你应该相信我的与使用不同螺旋桨的功耗(我有一个瓦特表,没有猜测)相比,全油门推力的“感觉”。我有这些道具的尺寸相当合适[直径] [俯仰] - [刀片#]:
5056-3 - 》太多电流
5050-3 - 》太多电流
5046-3 - 》我的选择
5042-3 - 》好的,但你可以使用更多的力量
4045-3 - 》小推力而且效率不高
6050-2 - 》太多电流
6040E-2 - 》好的,但是很吵
5030-2 - 》好的,但你可以使用更多的电量
BATTERY :任何击球手可以提供20-25A的y是可以的,容量应该在1000到1800mAh之间。我想1300mAh 20C 3S锂电池将是最佳选择,价格/性能明智。我还将测试由18650电池制成的4S锂离子电池,我稍后会讨论。
SERVO MOTORS:这些小部件会移动副翼,所以他们将控制飞机的飞行路径。你可以想象这不是省钱的最佳组件,放弃质量。如果您对esc或电机有问题,您仍然可以尝试着陆进行受控制的滑行,如果您的伺服器没有响应,则飞机将失控。好消息:你只需要其中两个,所以优质伺服系统不是预算的一大块。任何带有金属齿轮的良好数字伺服都是合适的选择,合适的尺寸是9g伺服。
RADIO TRANSMITTER/RECEIVER(TX/RX):我不会谈论这个组合,因为主要有两个选项。选项一:你已经拥有一个,所以你已经知道我在说什么以及如何使这个项目适应你的收音机。选项二:你没有收音机,那么你应该坚持使用建议的收音机。一个不错的选择是Flysky FS-I6搭配FS-X6B。这些廉价的收音机有很多改装潜力,你可以看到我的其他教程,所以你可以提高性能,并可以添加很多功能只是为了几块钱。无论如何,使用这个接收器,你可以轻松地发送超过1.5公里的飞机,这对于休闲飞行来说并不坏。其他收音机更好吗?是的,但价格高出好几倍,所以这没有意义。最后,唯一的要求是有一个可以输出串行总线的接收器(用于Flysky的i-bus,还有sbus和其他工具也可以工作)或至少PPM输出。建议使用串行总线!
CAMERA(CAM):这个选择非常主观,可能会对您的钱包产生显着影响。你可以用5到100美元的相机飞行,这里的性能与价格紧密相关。一些评论说没有最好的一个你不能飞。这是假的,你实际上可以飞,舒适性更差,颜色可能会褪色和/或不真实,但仍然足够好。我的选择是Foxeer HS1177-V2,这是一款经过良好测试和欣赏的FPV相机。
VIDEO TRANSMITTER(VTX):不同的地方有不同的规则,请检查你的。我的选择是便宜但足够好的Eeachne TX526。它可以在通常的5.8GHz范围内工作,它可以设置为不同的传输功率,并且它具有最小的占位面积之一。
VIDEO ANTENNA:您有两个主要选择:线性和圆极化。股票天线,直线型“类似路由器”,是线性极化天线,如果您想要最远的视频范围,这是最佳选择,但它需要您的飞机大部分是平坦的。建议的“蘑菇状”天线使用圆形极化,如果您有活跃的飞行,这些天线是最佳选择。线性极化要求两个天线几乎对齐,圆极化不关心。我想做循环和转弯(高倾斜角度),因此我选择使用圆极化天线。在发射器和接收器上具有相同的偏振非常重要,并注意圆偏振可以是“左或右”偏振,不要混合它们。长话短说:在发射器和接收器上使用相同的天线,你不会犯错。
视频接收器(VRX):我不能告诉你什么在本教程中使用,因为我只需要几页来涵盖主要选项。此外,价格范围相当广泛,您可以轻松投入更多资金购买FPV护目镜,而不是购买本教程的所有其他组件。使用FPV监视器或FPV护目镜,有或没有多样性,选择是你的。我会使用便宜的FPV护目镜,你知道,他们会睡在我的车里因此没什么代价。 (如果你真的想要一个建议写评论)
飞行控制器(FC):有很多不同的型号,你可以有完全可选和昂贵的或您可以拥有基本功能,但如果您需要一些高级功能,则需要其他组件。我的选择是Omnibus F4 Pro V3,这是一个很好的混合嵌入式功能,价格合理。首先它是F4而不是F3 CPU,这对于目前为止的所有内容来说已经足够了。它有一个嵌入式OSD芯片,可以直接从主配置器中轻松设置。它具有3A 5V BEC,足以轻松为其他所有设备供电。它有一个嵌入式电压传感器(通用)和电流传感器(不常见)。有三个物理串口,你可以连接很多额外的设备,如GPS,遥测,串行总线RX输入。..。..你可以节省一些钱购买SP F3板或Pico Blk板,但你需要购买和设置外部OSD模块,外部电流传感器,软件无法达到相同的循环速度。..。..更不用说使用“外部”软件配置外部组件的额外工作量,额外的重量和时间要求附加布线。此外,外部组件不是免费的,所以如果你不想放弃一些功能,你不应该因为多种原因购买更便宜的FC。
你可以购买更昂贵的FC,他们是无疑更好,但他们不会为这类项目给你更多,他们通常更大更重。
还有更多:建议的FC也可以与Arduplane一起使用! Arduplane是一个更成熟但更复杂的固件,本教程不会讨论它,但是对于将来也有这个选项很好。你永远不能告诉。..
GPS:这是自主航班所必需的,我们主要用它来覆盖我们的屁股,并有一架可以返回家的飞机在视频/无线电信号丢失的情况下。最常见的模块也有一个嵌入式指南针,但这适用于直升机。由于我们的飞机必须至少具有一定的飞行速度,因此通过坐标减法来定义其方向总是很容易的。最好的选择是BN-180或BN-220模块,我已经测试了两者并且它们非常相似,除了220可以更新firwmare的事实。这个更新的固件可以给你什么?我不知道,我不关心它,它与库存一起工作得很好。我的迷你爪上有一个BS-880,带有集成指南针,但出于同样的原因我不使用它的指南针,它甚至没有接线。实际上,BS-880可以更快地实现GPS锁定,即使在我的地下室也可以看到几颗卫星(我不是在开玩笑!)。为880花更多钱是值得的吗?嗯。..因为我仍然无法在我的地下室飞行,因为180/220只需要更多的时间来获得GPS锁定,我会选择BN-180/220模块,它更小,打火机(那很好!)。
编辑:我从中国订购的GPS模块已经到了故障(死机),没什么大不了的,他们会再发给我一个,但我得等一下交货。由于我不想等待,我将使用备用BS-880,但这与设置无关。
步骤3:可选组件



项目的前提已经很好了,但是通过这些组件,你可以将一个好的FPV平面升级为一个很棒的FPV飞机。
1)我将对锂离子电池进行一些测试,我的计划是通过使用4S,2600mAh,7C,DIY电池来增加飞行时间。正如我已经在这个网站的一些评论中写道的那样:我不相信有人声称他们可以使用笔记本电脑回收的细胞飞行无人机。我将使用20A全功能的全新电池,这些电池通常用于吸烟,这对于驾驶RC飞机来说几乎没有“足够好”。即使在原始状态下,良好的笔记本电池也不能提供超过4-5A的电池。他们甚至无法管理小型高效飞机的起飞功耗,这就是为什么我称之为完整的b。声称你可以用它们举起四轴飞行器。无论如何,有很多关于DIY 18650电池的教程,请务必从信誉良好的供应商那里购买电池。编辑:这个想法很好但是4S太重了,你需要3S电池。阅读最后一章。..
2)我将用覆膜覆盖每个表面!这不是一项艰巨的任务,这只是一项耗时的任务。..。..在模型上到处放置热收缩粘合剂薄塑料的过程需要耐心,但你会以更坚固,更坚固,更高效和更好看的飞机结束。无论如何,我可以想象只有少数人会投入2-3个小时来覆盖一切。如果你没有层压整个模型,你应该在机翼的前缘放一条胶带。这是最暴露的部分,值得花几分钟来保护它。如果你做了层压板投资一些适当的层压铁,这种弯曲的小型材,标准的熨斗熨斗太大又太重,小的细节将是a的痛苦。
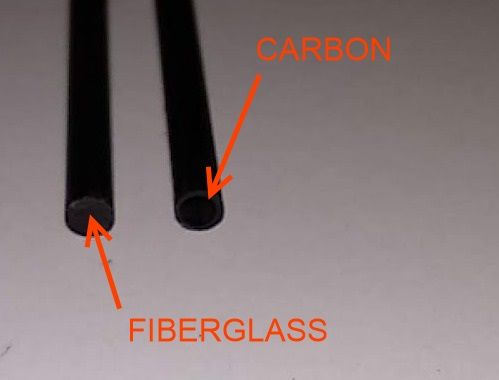
3)由于我将使用4S电池,我必须期望更高的速度,更高的速度意味着更高的机翼压力。我决定用碳纤维晶石替换玻璃纤维晶石,它更坚硬(而且更轻,但这并不是真正相关)。我不担心飞机会在急转弯时摔成两半,它不会,我只是想让它变得更加僵硬。碳晶石(以及层叠的机翼!)将显着提高飞机的刚度,从而显着提高飞机在高速和高G机动时的操控性。
第4步:框架组装



现在是时候粘贴一些东西了。组装非常简单,没有机会在错误的地方粘贴东西,但你必须使用适当的胶水。不推荐使用通用“超级胶水”或氰基丙烯酸酯胶水,需要使用泡沫专用胶水。 UHU POR是理想的,但也可以使用其他泡沫胶。一个提示:在构造结束时粘合稳定器翅片,在电线布线期间你将有更多的移动空间。
要粘贴伺服器,你可以使用热胶,只需几滴。我担心翼下伺服连杆,当你落在不平坦的表面(如每个场地)时会使它们受到冲击,所以我宁愿使用不那么强的胶水,以防万一我必须更换它们。这是更好的翼型效率的代价(由于清洁的上表面)。
当伺服轴位于其跨度的中间时,注意将伺服臂安装在与伺服机壳成90°的位置。伺服臂应该能够在两个方向上同心地移动,从90°开始。
为了安装电机,我使用了一个定制的3D打印部件(感谢Mark),这比库存更好因为它使马达进一步向后,允许更大的支柱间隙(和稍重的电池)。当框架在桌子上时,电机不是水平的,在飞行过程中它会被调平。
FC使用四个尼龙支架,粘在机身底部。 FC的理想位置恰好是CG,在这种情况下,它将位于碳晶石下面,它会非常不舒服。我把它放在碳晶石前面。
GPS,VTX,RX和电机应尽可能放置,特别是相对于电机,以尽量减少干扰。我不打算用这种型号做远程,所以这不是强制性的,并且在机翼末端安装部件的缺点是惯性增加,这对于短距离有趣的机翼是不利的。我找到了一个很好的折衷方案,不会因为很多长线而烦恼,但仍然保持元件分开。
由于我已经层压每个表面,我不得不在泡沫中切槽附加组件。如果你没有层压表面,这不是强制性的,但它仍然是强烈推荐的,因为它保留了令人敬畏的飞机的空气动力学。唯一不应该覆盖的部件是VTX,因为它需要通过新鲜空气冷却,我附加了坚固厚实的双面胶带。
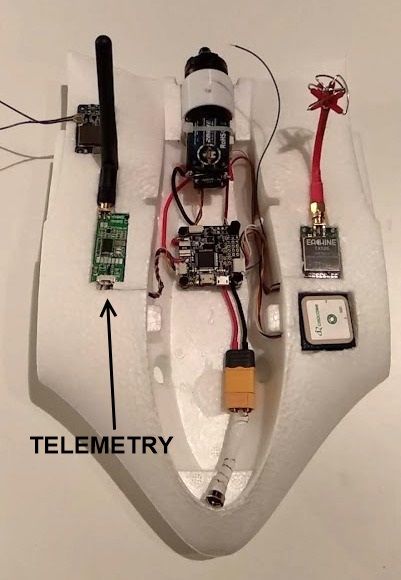
在照片中你还可以看到遥测模块,我会用它来对地面站进行一些测试,但我不想增加本教程的复杂性,只需忽略它。
我把凸轮放在鼻子里(很明显),我在机身泡沫上切了一个专用插槽。请注意,如果您希望在飞行过程中凸轮指向正前方,它应该与电机对齐,而不是与工作台对齐。
我已经切断了电机罩上的顶部翅片,它没有做任何事情除了制造噪音并减少螺旋桨上的空气流量(马克的提示,我完全同意)。
由于我已经将所有东西,也包括机身腹部层压在一起,机身下方的进气口现在已经密封。 ESC和电机必须冷却,所以我在红色顶篷上切开了一个小的矩形孔,正好在摄像机上方,以便有一个新鲜空气入口。我建议做同样的腹部密封,即使你没有层压所有东西,因为机身下方的进气口可能会收集污垢,如果你的树冠内有污垢,它只能通过电机退出,这不好。不要担心,你不会错过发射飞机的把握,你会得到自动发射的帮助,“飞盘发射”将起到一种魅力的作用。
还有更多:它的方式更多aredynamic你真的不得不同意我的光滑平坦的肚子看起来很棒! ^ _ ^
完成机械装配,只需按照您的喜好进行涂装,然后继续布线。
PS:喷漆很重!尽可能多地使用你的模型使你的模型在天空中可见,但尽量避免全身油漆,并避免多层。
步骤5:电气接线
您需要一些工具,我的基本DIY电子套件在这里收集。
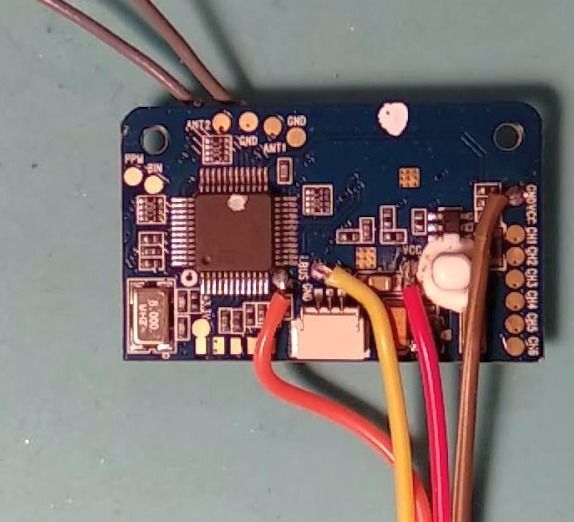
首先,FC必须早晚校准,移动PCB而不是移动整个机身更容易。因此,如果FC尚未校准,请跳至下一步(软件),校准FC并返回。
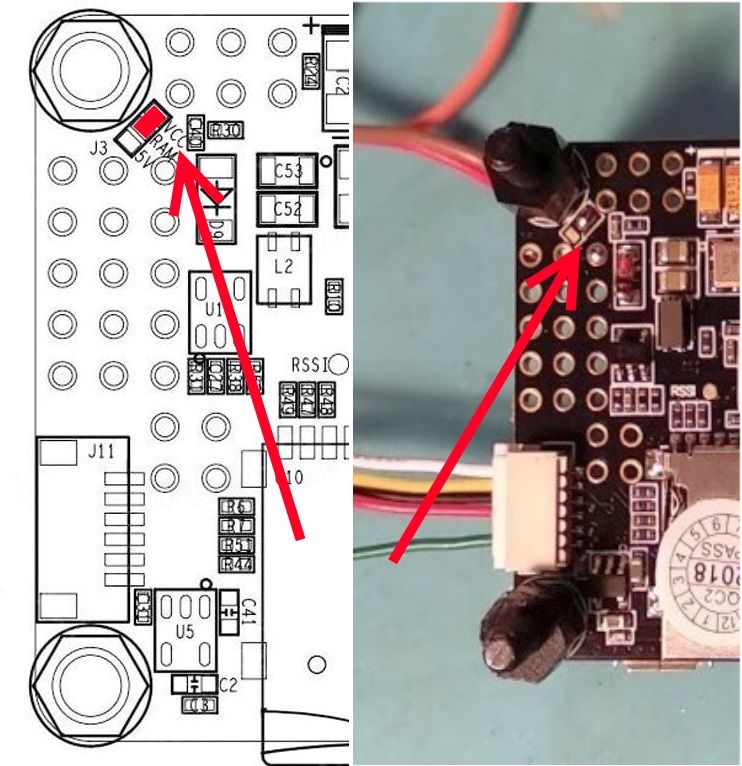
现在加热烙铁并使用一滴锡来桥接两个垫FC,看看照片。您必须将焊盘“RAM”与焊盘“VCC”连接,这将为VTX和CAM提供电池(未调节)电压。如果您不使用我建议的组件,请确保您的组件可以接受3-4S脂质电压。如果它们使用5V工作,则使用5V焊盘桥接RAM焊盘。
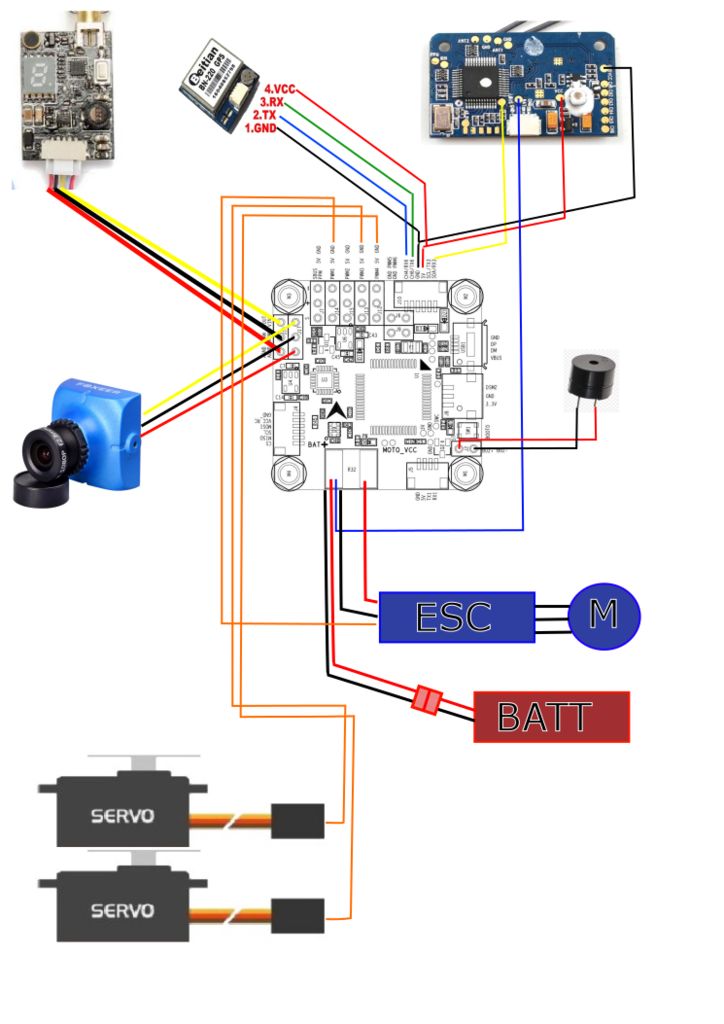
必须按照所附接线图所示连接其他组件。这并不困难,只需要一步一步并仔细检查极性和焊接质量。最烦人的事情是分开5V和GND电缆(为GPS和RX提供电源),并将esc和电池连接器的负极/黑色线焊接到同一个GND焊盘(大和方形下) FC)。这可能有些困难,使用丰富的助焊剂并将铁设置为最大功率。
提示:如果您对烙铁有信心,则应拆除大部分电缆中的连接器,然后将每根电线焊接到位。我已经完成了几乎所有的事情(除了舵机,我仍然希望能够快速更改它们),原因有两个。一,你可以在这里和那里节省几克。第二,连接器可能会在外观仍然正常时松动,你真的不希望在rc平面上出现隐藏的问题。尽量保持电线的长度,这也有助于减轻重量和电缆管理。
小心并仔细检查所有连接,可以用一些胶水固定碰撞,烟熏组件通常会被删除。 第一次不要使用脂肪给它加电!你应该使用不能提供大量放大器的电源,我使用的是12V 1A电源(你可以看到)上一步骤照片中的连接器适配器)。另一个不错的选择是我在这里描述的便携式可变电源。
步骤6:软件设置

好的,第一次FC设置可能会因为大量的新信息而势不可挡,但是,只要稍微耐心一点,我们最终会完成任务。
第一步:下载并安装固件(INav)配置程序。我有Win 10,尝试使用相同的操作系统,以尽量减少卡在某处的机会。我正在使用2.1.4版本,如果您发现了一些奇怪的东西并且您正在使用后续版本,请恢复并安装此特定版本。
现在最糟糕的部分是:驱动程序的安装。有时只是插入USB的问题,让操作系统做到这一点,其他时候你需要使用丰富多彩的单词和大量的亵渎。最好的Win10策略是使用这个免费软件:Impulse RC驱动程序修复程序。插入USB,以管理员身份运行并用手指交叉。
如果你打开INav配置器并在右上角的字段(查看图像,“驱动程序”矩形),你会看到一个新的COM端口,你可以连接到它,你没事。也许配置器软件会告诉您固件版本不兼容,但仍然很好,我们无论如何都会更新固件。
现在,拔下USB,按下FC上的“启动”按钮(当你重新插入usb时,按住蜂鸣器并保持按下状态。现在在“驱动程序”字段中你应该显示“DFU”。如果您没有看到DFU尝试再次运行驱动程序修复程序。如果您没有看到“DFU”但可以连接到COM端口,则可以转到CLI选项卡(进一步阅读),在输入栏中键入“dfu”,然后按Enter键。 FC应该在DFU模式下重新启动。
如果没有右上角的DFU选项,则无法继续,在尝试继续之前必须先找到解决方案。我不能写关于每个操作系统上所有可能的驱动程序问题的教程,你必须自己谷歌。
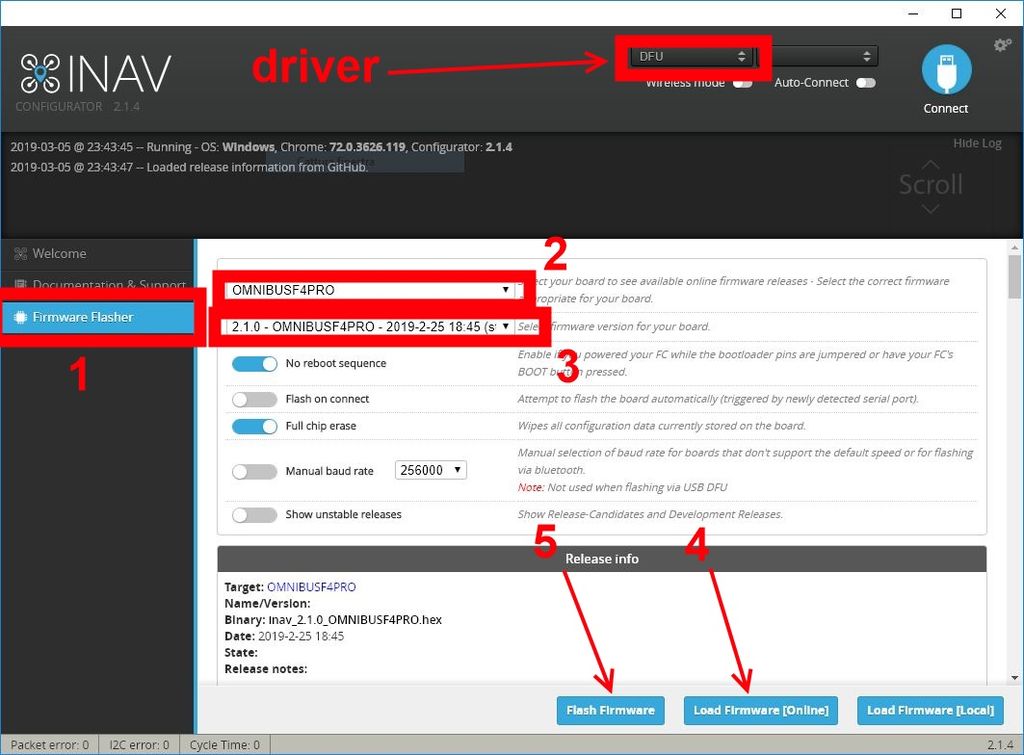
当你看到DFU,快乐的日子,最糟糕的部分已经完成!按照以下数字继续:
单击按钮Nr 1打开右侧选项卡,
在下拉菜单中选择正确的选项:“选择一个板” - 》 “OMNIBUS F4 PRO”,“选择固件版本” - 》“2.0.1 - OMNIBUSF4PRO 。..”
点击按钮Nr 4等待,你需要互联网连接,因为它会下载选择的固件,
单击按钮Nr 5,您应该在几条消息后看到消息“固件闪存”。
现在FC应该重启,而不是DFU你应该再次看到一个COM端口,如果它没有出现拔出USB并重试。单击“连接”,您应该在FC上联机。
现在您必须校准加速度计,进入“校准”选项卡并按照步骤进行操作。这很简单,你必须按住6个不同的角度按住FC并按下校准按钮。现在电路板已经过校准,您可以回去处理布线。
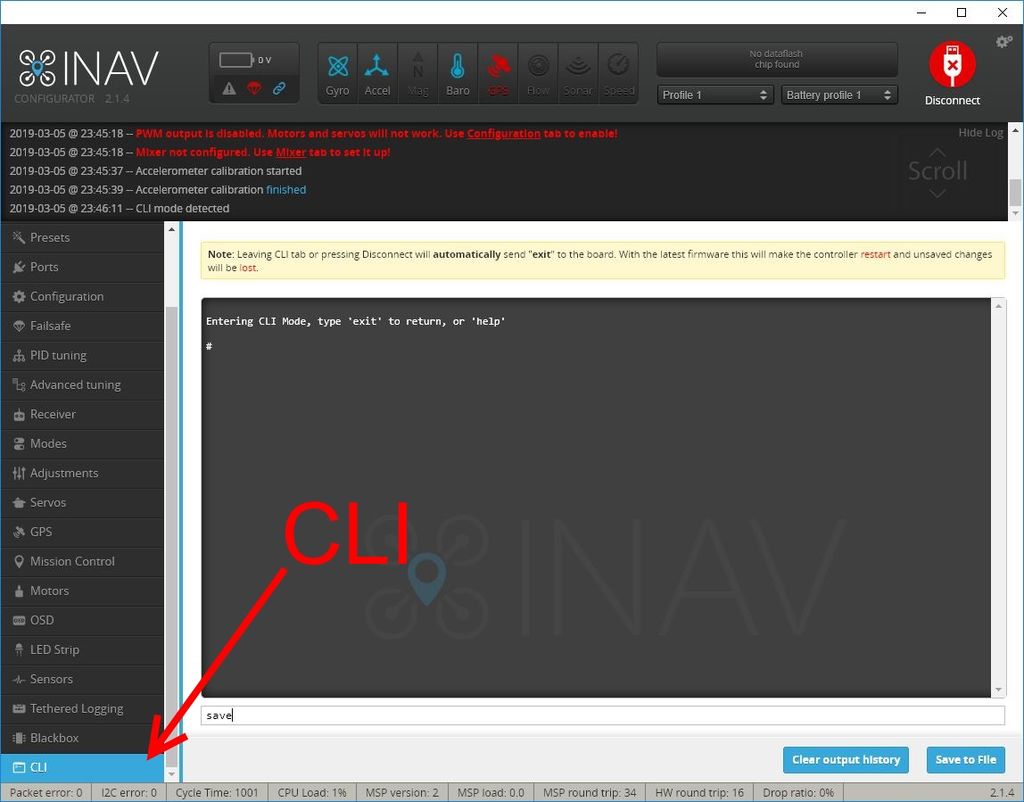
现在是时候设置新固件了,有大量的参数,在单个教程中无法解释所有内容。固件开发人员(或多或少)解释了他们的wiki中的所有内容,但是对于这个项目,我们将利用CLI(命令行界面)。不用担心,它只不过是一个复制和粘贴任务,并且通过这种方式完成工作比按照分布在多个页面上的几十个步骤制作的待办事项列表更容易。
你可以下载这里的完整配置文件,向下滚动到页面末尾或搜索“CLI OMNIBUS F4 PRO INAV 2.0.1”,它是配置文件下载链接。
该文件可以照原样使用。您可能只想更改一个参数,飞机名称,也会在OSD中显示。转到第840行或搜索字符串“set name”,当前值为“Z-84 UBHF.EU”,您可以随意使用,只需修改字符串(不要使用特殊字符)。
现在选择txt中的所有内容(ctrl + a在大多数文本编辑器上),然后复制它(ctrl + c)。
打开INav配置器中的CLI选项卡(查看屏幕截图)和点击输入字段(如果它在图像中写成“保存”),只需粘贴(ctrl + p)文本,现在按“输入”即可完成。最后一个字符串应该是“save”,当你点击enter时,值将存储在FC中,并且电路板本身将重新启动(并断开连接)。
现在你只需检查一切都已完成正确地,重新连接到FC,转到“接收器”选项卡并检查不同的通道是否按预期行事(绑定接收器!只需按下右键,大量在线教程)。如果您在建筑物内,GPS选项卡可能不会显示GPS锁定,但至少它不能显示错误。 OSD选项卡应该与上一步视频中的选项卡类似,但可以随意修改OSD页面中的配置(通过拖放)。根据需要修改布局,这对飞行并不重要。如果要更改变送器上的开关分配,请使用“模式”选项卡。
默认行为是:
- 开关A(CH5) - 》布置平面
- 开关B(CH6) - 》强制手动模式
- 开关C(CH7) - 》高度保持模式/水平模式/RTH模式
- 开关D(CH8) - 》故障安全killswitch
- var A(CH9) - 》 up = autotrim,left = autotune
- var B(CH10) - 》 down =蜂鸣器和故障保护
自动启动始终处于活动状态,因此您只需布防飞机,增加油门并启动它。如果你想要禁用辅助发射,你只需要操纵飞机并移动滚动或变桨杆。
就是这样,现在你有一架漂亮的飞机可以玩得开心了!
第7步:MAIDEN FLIGHT&UPDATES:
嗯,我低估了锂离子重量。 4S 18650电池的重量太大了,我需要将它放在FC上以获得正确的CG(这是不可能的)。实际上它是第四个提供额外重量问题的电池,一个3S电池将是完美的。实际上我没有备用18650电池来制造3S电池,这款4S电池也可以和其他型号一起使用,我不想卸下它。另一个选择,你可以在翼尖(CG后面)添加40-50g以平衡细胞的轮胎。现在的问题是你已经增加了很多滚动惯性(更不用说相关的压载重量)了,这在一个有趣的机翼中是不可取的。这根本不值得,它会削弱锂离子会产生的任何积极影响。
除了我对这个模型非常满意,在视频中你可以看到从DVR记录的首航。我写了一些提示,你应该按照我写的而不是我实际做的事情(是的,结果很好,但它过于自信而且不是最安全的飞行方式)。
飞机表现非常好低油门和全油门都很好。当电流传感器正确校准后,我会高速尝试不同的螺旋桨(相对于台架测试,它们在高速时表现不同)。到目前为止,马达/esc/螺旋桨组合似乎没问题。这架飞机不会受到太多的阵风(这是一架轻型飞机而且有阵风!)并且它保持稳定和精确。到目前为止达到的最大速度超过100公里/小时,但飞机也可以滑行很好,它不会担心倾斜失速,即使受到一些粗糙的操纵(紧急转弯,机翼翻转,环路。..。..)的压力,它也能很好地做出反应。 。这不是一个合适的教练机,但它并不需要很多技能和平飞行。
GC应该正好位于碳晶石的前缘。有了CG上的一个点,飞行特性是惊人的,如果CG距离最佳点5mm远那么。..。..我不喜欢那么多。无论如何,5毫米是相当多的,无论如何要记住一架前进CG的飞机飞得很厉害,一架带有后向CG的飞机飞过一次。
动力:20A @ 3S没问题,你可以‘做无限的垂直飞行,但你有足够的力量进行杂技演习。 12A @ 3S适合轻松飞行,30A或4S应保留给熟练的飞行员和刚性模型(碳晶石和碾压)。
我必须同意其他评论,这是一个非常好的飞机套件,可以适应很多不同的口味,它可以很容易地设置为飞行超过130公里/小时,或它可以是一个斜坡,或者它可以是一个非常有效的远程平台(它非常好)。
不要像我一样愚蠢:不要在机盖上安装高清摄像头!显然它的塑料夹在acro manouvres期间不能将它保持在原位,它应该是cristal clear。使用魔术贴或其他东西,但将其贴在机身上。对不起,没有高清视频片段。 :|
我没有别的可说的,除了我想到Z-84 Mark-II,我想在这架飞机上添加我唯一想念的功能:分开的翅膀要放在背包里(比如我的镖)。
-
遥控飞机
+关注
关注
1文章
16浏览量
8433
发布评论请先 登录
相关推荐
红外遥控与蓝牙遥控的区别
2.4G收发芯片遥控玩具方案开发,解决方案
2.4G收发芯片遥控玩具解决方案
飞机的飞行原理和结构动态图
如何设计一架航模飞机
飞机供电特性测试系统
基于pid控制方法的操控遥控飞机实例

使用ESP8266 DIY GoPro Wi-Fi遥控器

制作一个4通道射频遥控器
制作一个4通道射频遥控器





 工商网监
工商网监
评论