聚丰项目 > 自动定位无线充电的小四轴
无人机发展前景广阔,相对于有人机具有巨大的优势,但是其续航能力成为拖累,严重制约发展,不能真正做到无人。本项目旨在探究小四轴的自动无线充电,为无人机的“无人化”提供思路。(本项目采用的是IDT 3W无线充电开发套件)
![]() 残影斜阳
残影斜阳
![]() 残影斜阳
残影斜阳
团队成员
江逸顺 学生
张良总 学生
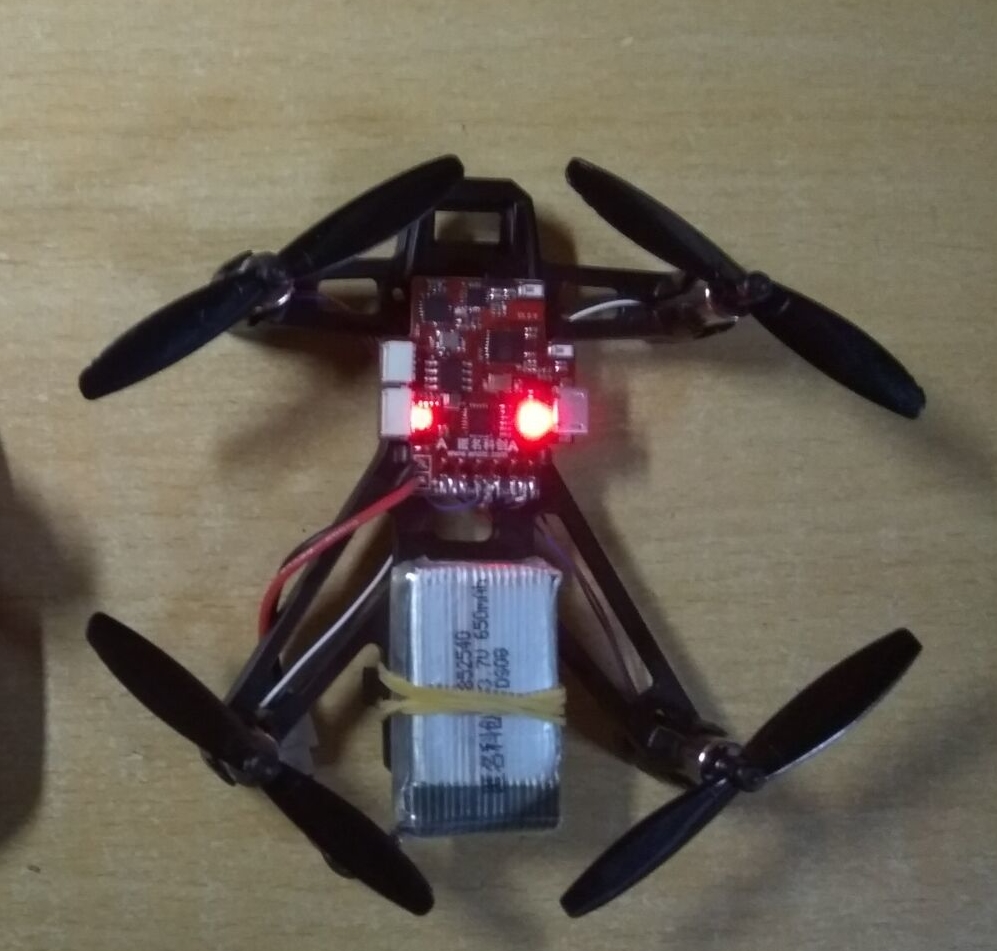
硬件部分主要包括IDT无线充电开发套件(3W);
使用LTC4054芯片配合无线充电套件进行充电;

使用MPU6050芯片获取飞行状态,用MS6511气压传感器获取高度信息;

用STM32F103C8T6作为主控,用NRF24L01通信;
使用MDK5开发平台,通过读取MPU6050数据,获取当前小四轴飞行状态,进行姿态解算,同时结合气压传感器信息调整飞行姿态。由于硬件和软件均存在一定问题,系统工作存在一定问题。
小四轴由于电机损坏和软件问题,暂时不能正常工作,非常抱歉!
在飞行过程中难以控制,系统暂未加上摄像头,不能自行寻找无线充电点。
yaoquan5201314: 这个不错,我早两年前也有这个想法,只是一直没有时间去实现,加油!少年!希望能早日实现大批量量产。
回复
 工商网监
工商网监