企业号介绍
全部
全部
产品
方案
文章
资料
企业
登录/注册
申请入驻
控制台
发布产品
线索管理
企业号设置
我的主页
我的收藏
我的关注
我的试用
消息
设置
退出
康谋keymotek
康谋(前身为虹科自动驾驶事业部)是一家专注于智能驾驶与具身智能领域的解决方案供应商
144
内容数
40w+
浏览量
7
粉丝
管理企业号
+ 关注
首页
产品
文章
视频
关于
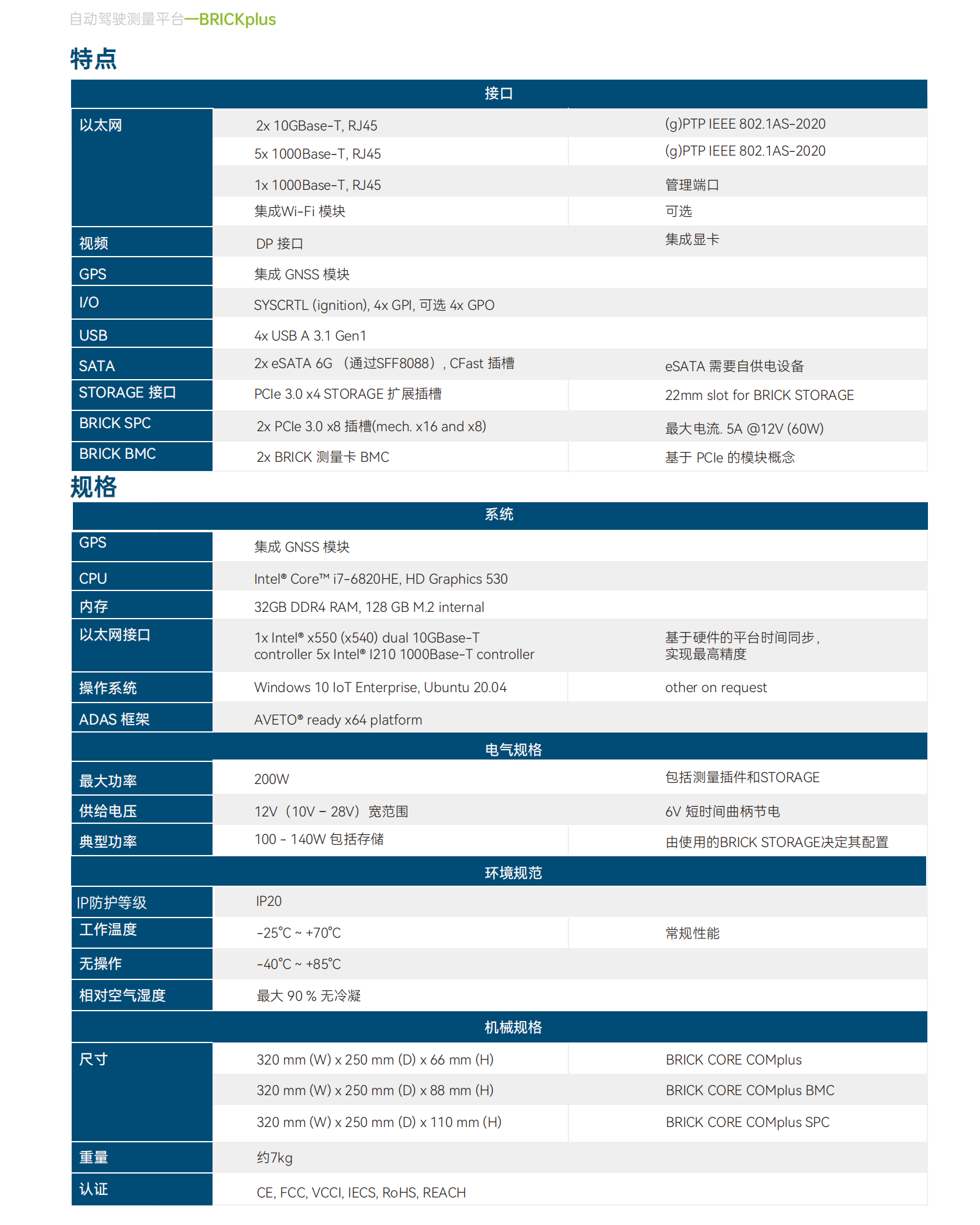
康谋b-plus 高带宽自动驾驶测量平台/ BRICKplus
adas
数据记录器
型号:
KM-B17575-BCC-120-00CN
品牌:
b-plus
立即咨询
扫一扫,分享给好友
复制链接分享
链接复制成功,分享给好友
--- 产品参数 ---
型号
KM-B17575-BCC-120-00CN
--- 数据手册 ---
BRICKplus产品手册-2024版.pdf
--- 产品详情 ---
为你推荐
产品
文章
康谋b-plus 多通道以太网数据转换分析仪/MDILink QX035
2024-04-15 16:50
产品型号:KM-B21671-MDI-001-0002、3、4、7
型号:KM-B21671-MDI-001-0002、3、4、7
立即咨询
康谋b-plus 双介质车载以太网分析仪/NETLion 10G
2024-04-15 16:48
产品型号:KM-B18085-NEL-001-0001、0002
型号:KM-B18085-NEL-001-0001、0002
立即咨询
康谋b-plus 双介质车载以太网分析仪/NETLion 1000
2024-04-15 16:45
产品型号:KM-B18005-NEL-001-0001、0002
型号:KM-B18005-NEL-001-0001、0002
立即咨询
康谋b-plus 高性能数据下载平台/BRICK Thunder Dock TB3
2024-04-15 14:46
产品型号:KM-B17575-BTD-004-0TB3
型号:KM-B17575-BTD-004-0TB3
立即咨询
康谋b-plus 高性能车载数据计算机/DATALynx ATX4
2024-04-15 14:09
产品型号:KM-B16047-DLY-EP3-0023、0024
型号:KM-B16047-DLY-EP3-0023、0024
立即咨询
康谋b-plus 高带宽自动驾驶测量平台/ BRICKplus
2024-04-15 13:52
产品型号:KM-B17575-BCC-120-00CN
型号:KM-B17575-BCC-120-00CN
立即咨询
康谋b-plus高带宽自动驾驶测量平台 /BRICK2
2024-04-15 13:48
产品型号:KM-B17049-B2C-002-C002
型号:KM-B17049-B2C-002-C002
立即咨询
拆解 2026/2027 NCAP 新规:智驾 HiL 仿真的工程落地与能力要求
2026-07-10 17:32
▍文章来源于康谋自动驾驶智能驾驶的规模化落地,正在迫使测试验证从“功能展示”转向“安全证明”。也就是说企业不再只需要证明“车辆能开”,更需要证明“系统在可定义边界内足够安全、过程可追溯、结果可复现”。尤其在L2+/L3能力快速迭代,以及即将落地的2026版E-NCAP、20
HIL
仿真
智能驾驶
测试
1441
浏览量
ROS2真实小车 × aiSim数字孪生:VIL车辆在环系统设计与闭环验证
2026-07-03 17:36
引言在移动机器人与自动驾驶系统的研发过程中,算法的测试与验证往往占据了大量的生命周期。传统的开发验证模式通常在两个极端之间摇摆:一是依赖纯物理环境的真实实车测试,这种方式虽具说服力,但面临长尾场景难以复现、极端天气难以模拟、安全风险高以及测试
ROS
数字孪生
自动驾驶
730
浏览量
大众、特斯拉高额被罚复盘:视觉数据该如何正确做合规?
2026-06-29 17:34
在自动驾驶技术研发中,数据是驱动算法迭代的基础资源。据估计,一辆自动驾驶汽车在一个半小时的驾驶过程中,即可产生高达4TB的数据。然而,车载摄像头采集的路况视频中不可避免地包含人脸、车牌等个人信息,这使得
数据采集
自动驾驶
视觉数据
1786
浏览量
2026年ADAS仿真测试法规解读与风险防控
2026-06-26 17:33
2026年正式成为国内ADAS仿真测试法规元年。随着国内强制国标集中落地、联合国UN法规迭代、NCAP测评体系全面升级,ADAS仿真测试彻底跳出“研发辅助工具”的传统定位,正式纳入车型型式认证法定准
adas
仿真测试
智能网联汽车
2839
浏览量
两大智驾强制国标报批稿公示,仿真测试成高阶智驾“安全准入门票”
2026-06-23 17:35
近日,工信部就《智能网联汽车自动驾驶系统安全要求》《智能网联汽车组合驾驶辅助系统安全要求》两项强制性国家标准报批稿公开征求意见,将于2027年7月1日正式落地实施。不同于以往行业推荐性规范,本次两项国标为全国强制执行的法定准入标准,覆盖L2级组合驾驶辅助至L4级高度自动驾驶全等级车型,彻底终结智能驾驶行业“野蛮生长”的发展阶段,
仿真测试
智能网联汽车
智能驾驶
自动驾驶
2029
浏览量
当预算与交期面临挑战:一种高性价比车载数采架构的可行性与能力解析
2026-06-22 17:33
一、从“单一选择”到“多方案评估”在自动驾驶场景重建与多传感器融合系统中,数据采集硬件的选型直接影响项目节奏与数据质量。近年来,受全球供应链波动影响,部分以交付稳定著称的国外方案也出现了
数据
自动驾驶
车载
127
浏览量
摄像头无处不在,隐私保护如何不掉队?
2026-06-18 17:34
一、引言2026年,我们已完全生活在一个“视觉世界”中,智能城市监控、车载行车记录仪、市场调研影像、AI训练素材等场景中,摄像头无处不在,图像与视频数据呈爆发式增长。这些数据为技术创新、业务分析与服务优化提供了海量支撑,同时也带来了严峻的隐私安全与合规挑战。视觉数据区别于
AI
摄像头
视觉
1397
浏览量
1W+观看、1000+人同屏!这场智驾仿真直播的20+个干货来了!
2026-06-15 17:02
下午,康谋“速通高阶智驾仿真测试——新一代智能驾驶仿真平台与应用!”直播圆满结束,感谢各位观众的支持与互动。本场直播聚焦4大核心议题:全球法规合规x3DGS量产瓶颈xaiSim6平台突破xHIL仿真案例!累计观看人数突破1万+,最高同时在线人数超过1000人,评论区互动热烈,提问不断。大家的热情与专业探讨,让这场技术分享变得更加精彩与充实。康谋感受到了大家的
仿真
智能网联汽车
智能驾驶
1716
浏览量
CoppeliaSim功能全景解析:一款面向算法验证与科研教育的开放型机器人仿真平台
2026-06-12 17:33
一、引言在机器人开发的链条里,仿真往往是被低估却又绕不开的一环。物理样机昂贵、迭代缓慢、试错成本高,而一个高质量的仿真环境能让算法、结构、控制策略在进入硬件之前就完成大量验证。CoppeliaSim(前身为V-REP)正是这一领域中经久不衰的代表。它由瑞士CoppeliaRobotics开发,以“分布式控制架构”和“高度开放的接口体系”著称,既能满足科研人员
仿真
仿真器
机器人
579
浏览量
强光、暴雨、泥污、大雾——不依赖天气的相机感知验证怎么做?
2026-06-05 17:32
一、引言想象一下:你开发了一套自动驾驶相机感知算法,需要验证它在强光逆光、暴雨、摄像头镜面被泥水污染等极端场景下是否稳定可靠。现实道路测试?等一场大雨需要时间制造一场大雾需要运气一次完整的实车路测动辄百万成本某些危险场景根本无法在公共道路上重现这就是整个自动驾驶行业的
传感器
相机
自动驾驶
1370
浏览量