模型验证 - 基于模型的Zynq SoC软硬件协同设计工作流程及其案例研究
一旦性能使用高保真度模型验证完毕,接着在硬件中对控制器进行原型设计。根据图 1 所示的工作流程,首先从生成 IP 核入手。IP 核生成工作流程指导选择目标开发板,引导完成映射内核的输入和输出端口到目标接口的流程,包括 AXI4 接口和外部端口。
通过与 Vivado Design Suite 集成,该工作流程能完成比特流构建和 Zynq-7020 SoC 的架构编程。
现在 IP 核已经加载到目标器件上,下一步是从针对 ARM 内核的 Simulink 模型上生成嵌入式 C 语言代码。从生成 C 语言代码、编译 C 语言代码和用嵌入式 Linux 构建可执行文件整个过程完全自动化,然后原型即可投入运行。
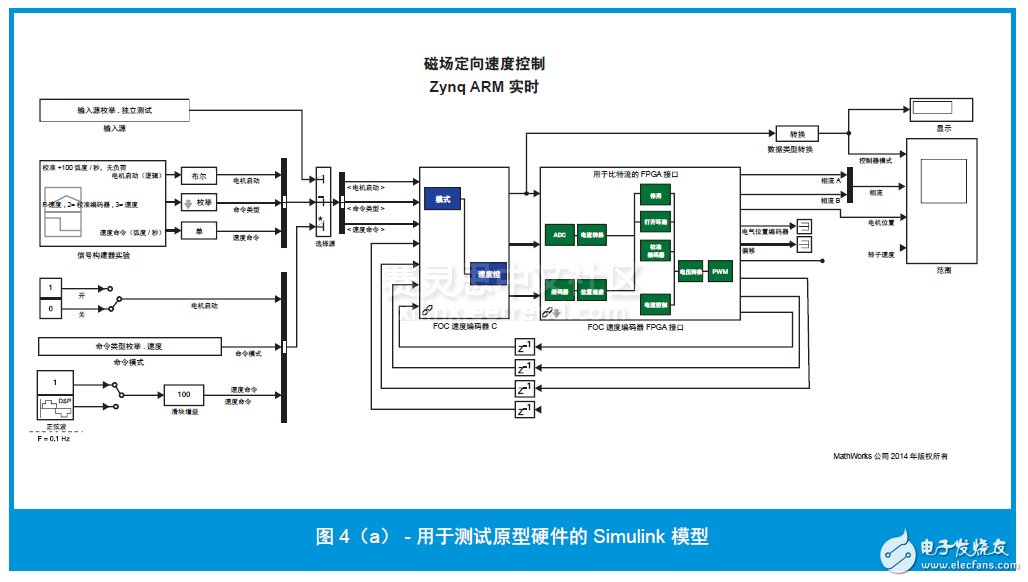
为了运行原型硬件并验证其结果是否与仿真模型一致,我们构建了一个用作高级控制面板的修改版 Simulink 模型(图 4a)。在这个模型中删除了设备使用的仿真模型(即驱动电子电路、电机、负载和传感器部分),用连接到 ZedBoard 的 I/O 替代。
在 Simulink 会话中使用该模型可以启动电机,选择不同激励配置,监测相关信号,获取供在 MATLAB 中后续处理的数据,不过现在可以重复的是脉冲测试(图 3)。
图 4a 显示了硬件原型的轴转速和相流结果与仿真结果的对比情况。硬件原型的启动顺序与两个仿真模型的启动顺序有明显差别。不过这种情况的原因预计是硬件测试中电机的转子和定子的初始角与仿真中使用的初始角不同,导致电流控制算法在通过自己的编码器校准模式驱动电机时的响应不同。从施加脉冲第 2 秒开始,仿真和原型硬件的结果就基本完全吻合。
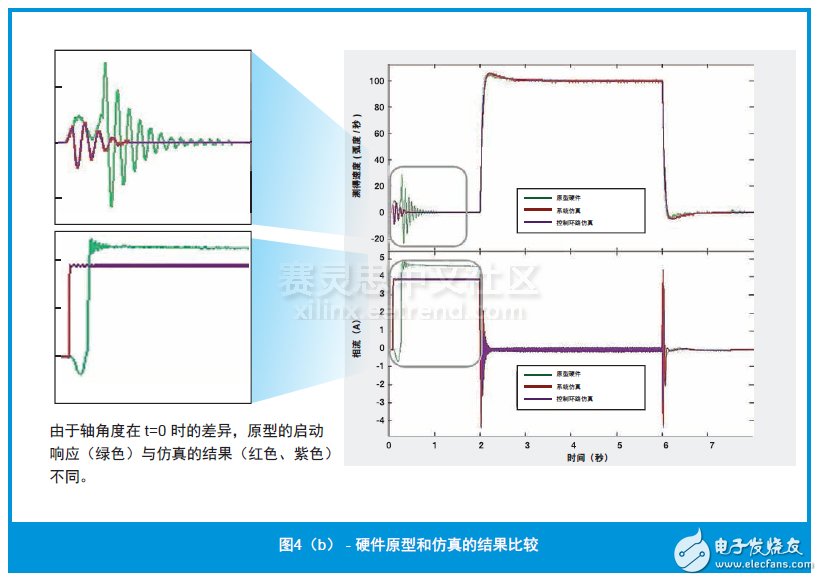
以这些结果为基础,可以继续进一步不同负载和运行条件下的测试,也可以开展进一步的 C 语言和 HDL 优化。
工程师正在转为使用基于模型的设计工作流程,在赛灵思 Zynq SoC 上实现算法的软硬件设计。Simulink 仿真能尽早评估算法,方便设计人员评估算法的有效性。无需实验室,在桌面上就能完成设计的权衡,显著提升生产力。业经验证的 C 语言和 HDL 代码生成技术,结合对赛灵思 All Programmable SoC 的硬件支持,为算法在真实硬件上运行提供快速且可重复的流程。仿真和硬件环境间的持续验证让设计人员能够在开发流程中尽早发现并解决问题。
MathWorks 为基于 Zynq 的开发板、软件定义无线电套件和电机控制套件提供工作流程支持。
MATLAB 和 Simulink 均为The MathWorks公司的注册商标,详见: marks 列出的其他商标。其他产品或品牌名称均为其各自所有者的商标或注册商标。
- 第 1 页:基于模型的Zynq SoC软硬件协同设计工作流程及其案例研究
- 第 2 页:三相电机控制
- 第 3 页:模型验证
本文导航
非常好我支持^.^
(0) 0%
不好我反对
(0) 0%
相关阅读:
- [电子说] 直播就在明天!Fidelity 风机高质量网格仿真一体化解决方案——Cadence CFD 极速前 2023-10-24
- [电子说] 模拟电子蜡烛电路原理图讲解 2023-10-24
- [电子说] N8957APV光伏列阵仿真器功率模块故障维修 2023-10-23
- [电子说] 时钟精度PPM设置仿真错误简析 2023-10-23
- [机器视觉] 机器视觉之图像增强和图像处理 2023-10-23
- [电子说] 关于Matlab的三种加密方式 2023-10-23
- [电子说] 内置式永磁同步电机复矢量电流调节器设计 2023-10-23
- [电子说] 51单片机温度控制调速风扇仿真设计 2023-10-22
( 发表人:黄昊宇 )