基于改进人工势场法的路径规划
大小:1.68 MB 人气: 2017-11-06 需要积分:0
标签:路径规划(15294)
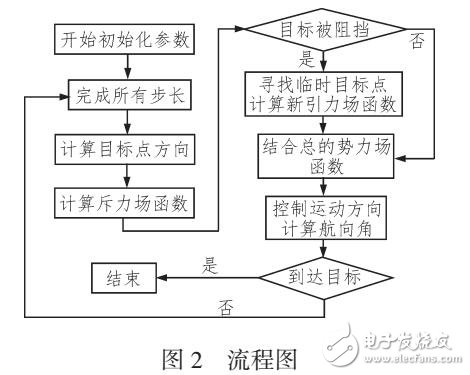
路径规划与识别作为智能机器人研究的最重要因素,具有重要的理论意义和实用价值。但传统的人工势场法在路径规划中存在目标不可达和局部最小值点的缺点,影响机器人到达目标点。针对其存在的缺点,本文采用改进的人工势场法进行路径规划,重新构建引力和斥力函数,引入运动因子,对结果进行仿真使机器人顺利跳出局部最小值点,且路径规划相对更短,有效的解决了复杂环境下机器人的避障不足,验证结果显示所提方法能够符合路径规划的要求。
非常好我支持^.^
(0) 0%
不好我反对
(0) 0%
下载地址
基于改进人工势场法的路径规划下载
相关电子资料下载
- 自主机器人近距离操作运动路径规划算法 392
- AGV在立体仓库中的路径规划 407
- 全局路径规划RRT算法原理 687
- CBS多机器人路径规划实例讲解 403
- 基于过Python+matplotlib数据可视化路径规划算法实现 884
- 机器人技术中常用的路径规划算法的开源库 614
- 机器人基于搜索和基于采样的路径规划算法 248
- 自动驾驶系统功能自车运动与路径规划介绍 495
- 全文详解A*算法及其变种 1166
- 路径规划算法实现原理 570