光电传感器 - 基于光电传感器的能自主识别道路的智能车
2012年08月07日 11:33 来源:互联网 作者:互联网 我要评论(0)
一、光电传感器
光电传感器的选择及电路设计
光电传感器位于智能车的最前方,起到预先判断路径的作用。其发射的光对白色和黑色有不同的反射率,因此能得到不同的电压值,采进单片机后通过一定的算法比较电压来判断黑线的位置,从而控制舵机的转动。这种方法易于实现,响应速度快,实时性好,成本低。
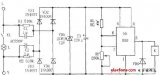
本文选用性价比基本适合的反射式红外传感器tcrt5000。红外光电传感器电路的设计形式多种多样,由于本文算法中采用的是传感器阵列经验判断方法,为了控制简便采用数字量输出传感器电路,如图2所示。

光电管采用脉冲调制式发光,即vo是震荡电路产生的脉冲电压,这样易滤除外界干扰。虽然电路相对复杂,但足以保证模型车的稳定行驶。
光电传感器布局的研究
光电管阵列的布局直接影响智能车的循线效果。一般来说,典型的布局有“一”字形布局和“w”形布局两种。
所谓“一”字形布局,就是把多个传感器按照“一”字排开。这种传感器布局方式最常见,算法在理论上易于实现。其不足之处在于:对赛道的曲率几乎没有任何预测功能。因此一般不采用这种布局。
而“w”形布局,是把多个传感器按照“w”形排列。“w”形布局由于传感器分布在两排,使得智能车对弯道有一定的预测功能,这种预测功能特别体现在直道进入弯道时刻。后一排传感器仍在直道时,前一排传感器已经进入弯道。而不足之处是增加了控制算法的复杂程度,判断舵机的旋转方向时,往往需要上一次的检测数据。经验判断的可能性也随着传感器数量的增加而增加。
光电传感器布局仿真
经多次仿真实验,最终确定了传感器的布局和数量。采用如图3所示的“w”形布局,一共有13个传感器,前排8个,后排5个,前后两排间距为3.5cm。设置这个间距,使其对赛道有一定预测功能。具体的布局及仿真效果如图4所示。

本文导航
- 第 1 页:基于光电传感器的能自主识别道路的智能车
- 第 2 页:光电传感器
- 第 3 页:循线控制算法
- 第 4 页:实验结果
- 第 5 页:实验结果与分析
标签: