基于Kinect的环境平面特征提取与重构
大小:0.86 MB 人气: 2017-12-19 需要积分:3
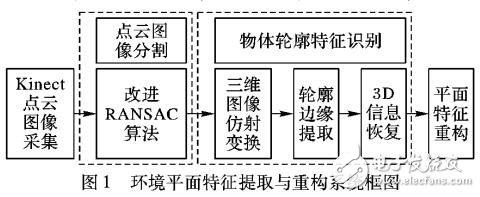
针对三维场景物体特征识别过程中数据量大、算法复杂等问题,提出一种基于Kinect的环境平面特征提取与重构算法。首先,针对场景的点云分割,采用融合场景几何信息和颜色信息的随机采样一致性( RANSAC)算法,综合二者分割优势,克服几何特征分割过程中分割不足或者过分割,提高分割精度;其次,根据投影变换原理推导出相应的三维坐标变换矩阵,指导分割后独立区域内的三维平面特征信息到二维空间映射,利用凸包概念搜索物体边界信息,实现二维空间的轮廓点提取;最后,通过旋转逆变换,恢复轮廓点的三维信息,完成环境特征重构。采用3组场景数据验证所提算法,实验结果表明,所提算法分割较精确,不容易产生过分割的情况,对不同形状特征的物体,具有较好的重构效果。
非常好我支持^.^
(0) 0%
不好我反对
(0) 0%