 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
组件
|
TB6612FNG(O,C,8,EL
|
× 1 |
|
227CKS035M
伊利诺伊电容器
|
× 1 |
|
741C083510JP
|
× 1 |
|
Y1624350R000T9R
|
× 1 |
|
标头男
|
× 1 |
描述
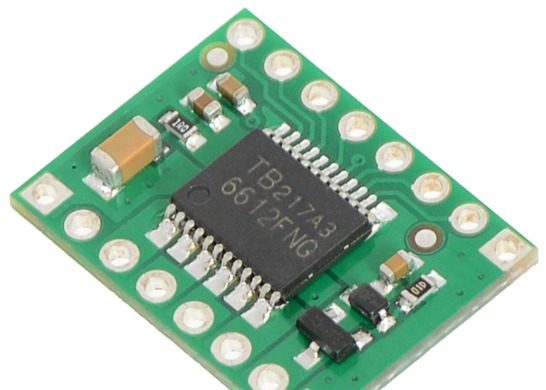
TB6612FNG 电机驱动
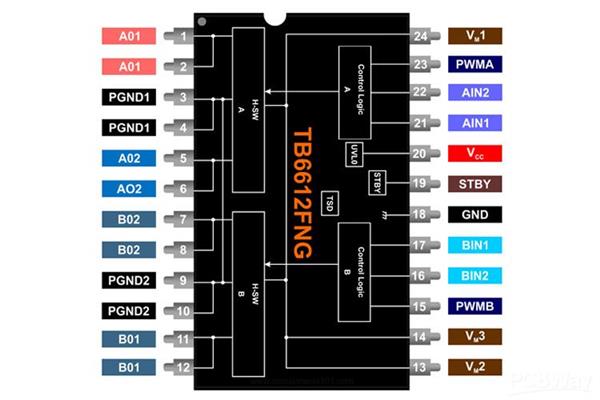
TB6612FNG电机驱动器可以以 1.2A(峰值 3.2A)的恒定电流控制多达两个直流电机。两个输入信号(IN1 和 IN2)可用于以四种功能模式之一控制电机:CW、CCW、短制动和停止。两个电机输出(A 和 B)可以单独控制,每个电机的速度通过频率高达 100kHz 的 PWM 输入信号控制。应将 STBY 引脚拉高以使电机脱离待机模式。
逻辑电源电压 (VCC) 可以在 2.7--5.5VDC 的范围内,而电机电源 (VM) 的最大电压限制为 15VDC。每个通道的额定输出电流高达 1.2A(或短单脉冲高达 3.2A)。
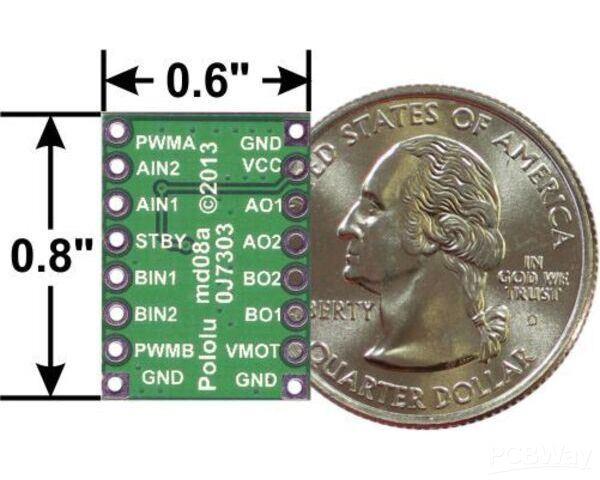
如图所示,这个小板安装了所有组件。两条电源线上都包含去耦电容。TB6612FNG 的所有引脚都被分成两个 0.1" 间距接头;这些引脚的排列方式是输入引脚在一侧,输出引脚在另一侧。
TB6612电机驱动模块采用TB6612FNG作为驱动芯片,具有大电流(1.2A连续电流),双通道输出,MOSFET-H桥结构,可驱动两台电机。电机电压和模块的工作电压是分开的——模块的 VCC:2.7 V 到 5.5 V,电机的 VM:15V(最大值)。但电机的最佳工作电压为2.5V-13.5V,低于2.5V时无法工作。
容易控制,通过设置MA和MB的高低电平可以控制两个舵机的正反转,PWMA和PWMB是控制电机转速的;因此,只有 4 个 I/O 引脚会被占用。电机连接和信号输入的防反接端口插接牢固方便。通过芯片内部的低压检测和热关断来保护电路,您无需担心破坏您的项目或损坏主控板。
特征
> 采用TB6612FNG电机驱动芯片,最大输出电流1.2A。
> 接线牢固方便,电机连接和信号输入均带有防反接端口。
> 简单控制:同时控制两台电机 - MA 和 MB 控制电机方向,PWMA 和 PWMB 控制转速。
> 双电源。模块的 VCC:2.7-5.5 V,电机的 VM:15V(最大)。
> 小巧轻便,带3mm安装孔,适用于智能汽车。
> 内置热关断电路和低电压检测。
> 尺寸:42 x 32 毫米
实验测试
我用 Arduino 驱动 2 个电机
驱动 2 个电机加速和减速。
成分
-1 x TB6612 电机驱动器
-1 x Arduino Uno
-1 x 电机
-1 x 18650 电池座
-2 x 18650 锂电池
- 几根跳线
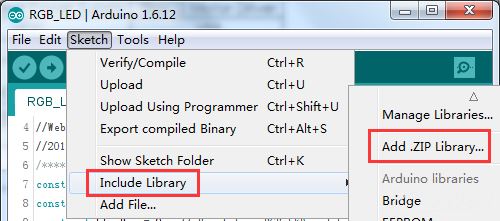
步骤 1. 安装库
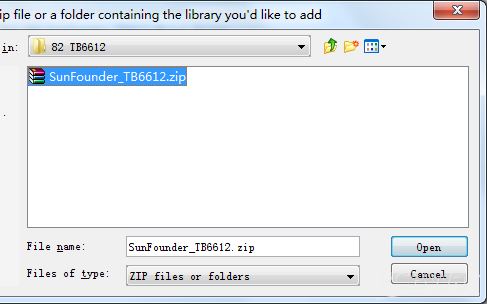
打开 Arduino 软件,选择 Sketch -> Include Library -> Add .ZIP Library。
选择下载的zip文件并打开。SunFounder_TB6612.zip
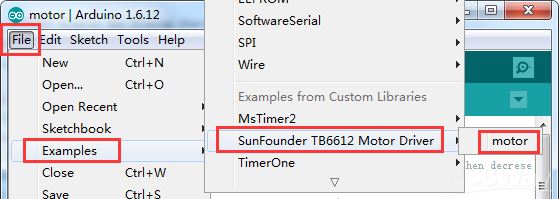
步骤 2. 打开示例
打开 File -> Examples -> Sunfounder TB6612 Motor Driver -> motor,然后上传这个例子
步骤 3. 接线
将独立电源连接到模块,如下图所示:
独立电源TB6612电机驱动VCCVMGNDGND
将 Arduino UNO 连接到模块:
Arduino UNOTB6612电机驱动器5VVCCGNDGND5MA6PWMA9MB10PWMB
将电机连接到模块:
电机TB6612电机驱动器黑线A1红线A2黑线B1红线B2
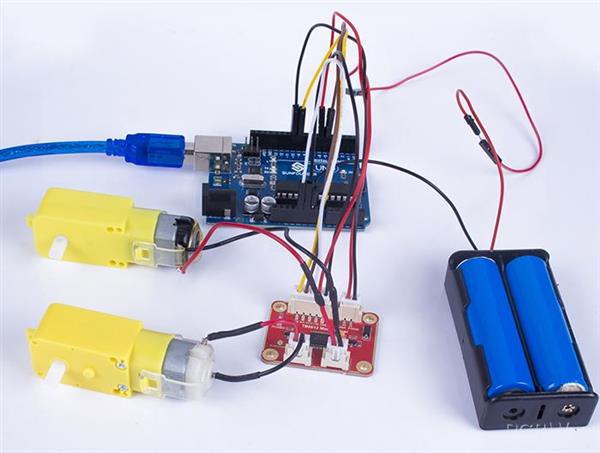
以下是接线的样子:
示例上传后,电机会加速旋转并正向减速,然后反向重复。
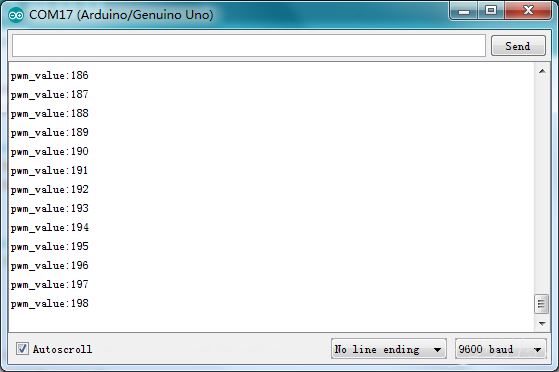
您可以打开串行监视器查看输出 PWM 值的变化 - 从小到大,然后从大到小。
电机转速与PWM值呈正相关。
II 用 Raspberry pi 控制 2 个电机
步骤 1. 接线
由于电机会消耗大量功率,因此您需要为该模块提供独立的电源,以确保伺服有充足的供电。
将独立电源连接到模块,如下图所示:
独立电源TB6612电机驱动VCCVMGNDGND
将树莓派连接到模块:
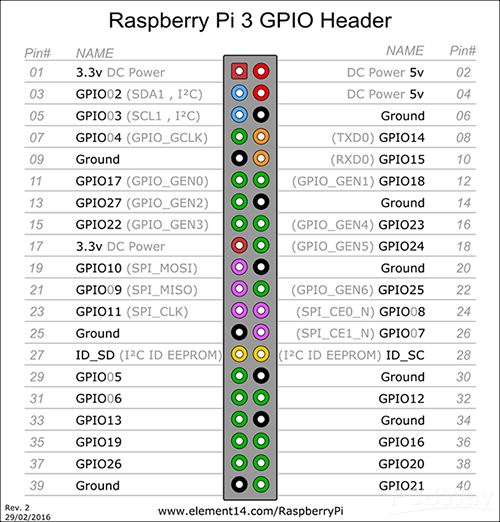
树莓派TB6612电机驱动3.3VVCCGNDGNDGPIO17MAGPIO27PWMAGPIO18MBGPIO22PWMB
将电机连接到模块:
电机TB6612电机驱动器黑线A1红线A2黑线B1红线B2
树莓派的引脚:
将伺服连接到模块:
电机TB6612电机驱动器黑线A1红线A2黑线B1红线B2
步骤 2. 建立您的项目:
通过 ssh 登录树莓派,从 Github 复制 TB6612 仓库:
git 克隆 https://github.com/sunfounder/SunFounder_TB6612.git
复制后,您将获得 TB6612 的 Python 包。将其导入Python程序中,即可使用。
这是一个简单的例子:
1.创建一个新文件:
mkdir test_TB6612/
2. 将包复制到文件中:
cd test_TB6612
cp –r /home/pi/SunFounder_TB6612 ./
3.创建代码文件
触摸 test_motor.py
这里你的程序的文件结构是这样的:
测试_TB6612/
有了这个结构,就可以成功导入 Python 文件了。
接下来,让我们看看如何控制电机。
步骤 3. 驱动电机的代码
纳米 test_motor.py
输入以下代码:
#!/usr/bin/env python
进口时间
从 SunFounder_TB6612 导入 TB6612
导入 RPi.GPIO 作为 GPIO
定义主():
进口时间
打印 ”********************************************”
打印 ”* *”
print "* SunFounder TB6612 *"
打印 ”* *”
print "* 将 MA 连接到 BCM17 *"
print "* 将 MB 连接到 BCM18 *"
print "* 将 PWMA 连接到 BCM27 *"
print "* 将 PWMB 连接到 BCM22 *"
打印 ”* *”
打印 ”********************************************”
GPIO.setmode(GPIO.BCM)
GPIO.setup((27, 22), GPIO.OUT)
a = GPIO.PWM(27, 60)
b = GPIO.PWM(22, 60)
一开始(0)
b.开始(0)
def a_speed(值):
a.ChangeDutyCycle(值)
def b_speed(值):
b.ChangeDutyCycle(值)
电机A = TB6612.电机(17)
电机B = TB6612.电机(18)
motorA.debug = True
motorB.debug = True
motorA.pwm = a_speed
motorB.pwm = b_speed
延迟 = 0.05
电机A.forward()
对于范围内的 i (0, 101):
电机A.速度=我
time.sleep(延迟)
对于范围内的 i (100, -1, -1):
电机A.速度=我
time.sleep(延迟)
motorA.backward()
对于范围内的 i (0, 101):
电机A.速度=我
time.sleep(延迟)
对于范围内的 i (100, -1, -1):
电机A.速度=我
time.sleep(延迟)
motorB.forward()
对于范围内的 i (0, 101):
电机B.速度=我
time.sleep(延迟)
对于范围内的 i (100, -1, -1):
电机B.速度=我
time.sleep(延迟)
motorB.backward()
对于范围内的 i (0, 101):
电机B.速度=我
time.sleep(延迟)
对于范围内的 i (100, -1, -1):
电机B.速度=我
time.sleep(延迟)
定义销毁():
电机A.stop()
马达B.stop()
如果 __name__ == '__main__':
尝试:
主要的()
除了键盘中断:
破坏()
按 Ctrl+X 退出,会提示保存更改,输入 Y(保存)或 N(未保存),然后按 Enter 键退出。
输入命令以运行示例:
python test_motor.py
我们仍然会看到电机加速旋转并正向减速,然后反向重复,如前所示。
附件
数据表
SunFounder_TB6612.zip
- STM32平衡小车 TB6612电机驱动学习 0次下载
- 使用STM32与TB6612FNG驱动直流减速电机 3次下载
- 直流电机驱动L298N和TB6612FNG详解 4次下载
- 树莓派驱动电机 1次下载
- TB6612FNG电机驱动模块纯硬件调试 1次下载
- 双DC马达驱动IC TB6612FNG产品规格介绍 0次下载
- 用PIC16F877A和TB6612FNG电机驱动的微型电路 4次下载
- TB6612FNG双路全桥驱动芯片的数据手册和电路原理图免费下载 30次下载
- TB6612FNG直流电动机驱动芯片的数据手册免费下载 35次下载
- TB6612FNG驱动芯片与直流电机控制教程资料免费下载 23次下载
- 直流电机的原理和控制减速器的作用及直流电机驱动芯片TB6612FNG概述 50次下载
- 基于AVR单片机与TB6612FNG的直流电机控制的设计与实现 23次下载
- TB6612FNG_Breakout_v11 59次下载
- TB6612FNG简介及其与单片机的直流电机控制系统设计 236次下载
- TB6612FNG在直流电机控制设计中的应用 124次下载
- H桥电机驱动器路图分享 474次阅读
- 开源电机驱动器开发方法与实现 498次阅读
- CLN17电机驱动器的特点和应用场景 729次阅读
- 驱动器和电机驱动器的概念 1462次阅读
- 电机驱动器和电机控制器的区别 2754次阅读
- 电机驱动器简介:H桥拓扑和方向控制 1958次阅读
- PCA9685的使用及RT-Thread PCA9685驱动组件详解 1.8w次阅读
- 步进电机驱动器有什么参数_步进电机驱动器常见故障维修 1.5w次阅读
- 基于THB8128的步进电机驱动器设计 1037次阅读
- dfrobotTB6612FNG微型双路直流电机驱动模块简介 5723次阅读
- 如何设置步进电机驱动器的参数 4w次阅读
- 步进电机驱动器工作模式_步进电机驱动器电路图 8224次阅读
- 东芝新推出的低功耗有刷直流电机驱动器芯片的详细介绍 4642次阅读
- 电机驱动器如何通过I2C接口使用PID算法控制电机 7344次阅读
- 电机驱动器模组方案 1769次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1ATmega8芯片中文手册
- 2.45 MB | 3次下载 | 1 积分
- 2带有集成场效应晶体管(FET) 的3.1V至5.5V输入,3A输出同步降压稳压器TPS51312数据表
- 1.28MB | 3次下载 | 免费
- 3VGA 转 HDMI 输出的音视频采集卡LCC385数据手册
- 0.34 MB | 2次下载 | 免费
- 4全志A527系列规格书YNH-830-V1
- 2.39 MB | 2次下载 | 免费
- 5光伏太阳能电池板可编程最大功率点跟踪控制器SM72442数据表
- 373.53KB | 2次下载 | 免费
- 6传感芯片选型指南
- 3.60 MB | 2次下载 | 免费
- 7高效1.5MHz 1.2A同步降压稳压器PL5900A数据手册
- 3.26 MB | 1次下载 | 免费
- 810 A 12-V输入非隔离降压开关电源模块PTH12060数据表
- 1.11MB | 1次下载 | 免费
本月
- 1ES9038PRO解码芯片的电路原理图介绍
- 0.25 MB | 33次下载 | 5 积分
- 2DC-DC电路(Buck)的设计与仿真
- 0.60 MB | 24次下载 | 2 积分
- 3UHD智能显示SoC VS680产品简介
- 0.46 MB | 11次下载 | 免费
- 4STM32国内外发展现状
- 1.15 MB | 8次下载 | 免费
- 5采用 Impedance Track™ 技术的宽量程电量监测计BQ34Z100-G1数据表
- 2.7MB | 7次下载 | 免费
- 6TDK电容器产品指南
- 11.88 MB | 7次下载 | 1 积分
- 7电池管理系统(BMS)软硬件介绍
- 0.23 MB | 6次下载 | 2 积分
- 816A 输出电流,高可靠、高效率 同步降压转换器PCD3201产品手册
- 0.47 MB | 6次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935085次下载 | 免费
- 2开源硬件-PMP21529.1-4 开关降压/升压双向直流/直流转换器 PCB layout 设计
- 1.48MB | 420049次下载 | 免费
- 3Altium DXP2002下载入口
- 未知 | 233067次下载 | 免费
- 4电路仿真软件multisim 10.0免费下载
- 340992 | 191315次下载 | 免费
- 5十天学会AVR单片机与C语言视频教程 下载
- 158M | 183316次下载 | 免费
- 6labview8.5下载
- 未知 | 81567次下载 | 免费
- 7Keil工具MDK-Arm免费下载
- 0.02 MB | 73786次下载 | 免费
- 8NI LabVIEW中实现3D视觉的工具和技术
- 未知 | 70088次下载 | 免费





 工商网监
工商网监
评论