 电子发烧友App
电子发烧友App


3)、在RCC的中断处理程序中,再对HSE和PLL进行相应的处理。
注意:一旦CSS被激活,当HSE时钟出现故障时将产生CSS中断,同时自动产生 NMI。NMI将被不断执行,直到CSS中断挂起位被清除。因此,在NMI的处理程序中 必须通过设置时钟中断寄存器(RCC_CIR)里的CSSC位来清除CSS中断。
2、SysTick工作原理
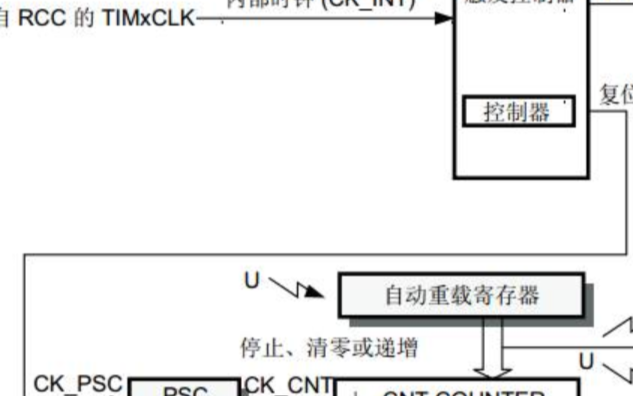
Cortex-M3的内核中包含一个SysTick时钟。SysTick 为一个24位递减计数器,SysTick设定初值并使能后, 每经过1个系统时钟周期,计数值就减1。计数到0时, SysTick计数器自动重装初值并继续计数,同时内部的 COUNTFLAG标志会置位,触发中断(如果中断使能)。
3、内部时钟输出PA.8(MCO)
STM32的PA.8引脚具有复用功能——时钟输出(MCO), 该功能能将STM32内部的时钟通过PA.8输出。
操作流程:
1)、设置PA.8为复用Push-Pull模式。
GPIO_InitStructure.GPIO_Pin GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
2)、选择输出时钟源。
时钟的选择由时钟配置寄存器(RCC_CFGR)中的MCO[2:0]位控制。
RCC_MCOConfig(RCC_MCO);
参数RCC_MCO为要输出的内部时钟:
RCC_MCO_NoClock --- 无时钟输出
RCC_MCO_SYSCLK --- 输出系统时钟(SysCLK)
RCC_MCO_HSI --- 输出内部高速8MHz的RC振荡器的时钟(HSI)
RCC_MCO_HSE --- 输出高速外部时钟信号(HSE)
RCC_MCO_PLLCLK_Div2 --- 输出PLL倍频后的二分频时钟(PLLCLK/2)
注:由于STM32 GPIO输出管脚的最大响应频率为50MHz,如果输出频率超过50MHz,则输出的波形会失真。
4、可编程电压监测器(PVD)
STM32内部自带PVD功能,用于对MCU供电电压VDD进行监控。通过电源控制寄存器中的PLS[2:0]位可以用来设定监控电压的阀值,通过对外部电压进行比较来监控电源。当条件触发,需要系统进入特别保护状态,执行紧急关闭任务:对系统的一些数据保存起来,同时对外设进行相应的保护操作。
操作流程:
1)、系统启动后启动PVD,并开启相应的中断。
PWR_PVDLevelConfig(PWR_PVDLevel_2V8); // 设定监控阀值
PWR_PVDCmd(ENABLE); // 使能PVD
EXTI_StructInit(&EXTI_InitStructure);
EXTI_InitStructure.EXTI_Line EXTI_Line16; // PVD连接到中断线16上
EXTI_InitStructure.EXTI_Mode EXTI_Mode_Interrupt; //使用中断模式
EXTI_InitStructure.EXTI_Trigger EXTI_Trigger_Raising;//电压低于阀值时产生中断
EXTI_InitStructure.EXTI_LineCmd ENABLE; // 使能中断线
EXTI_Init(&EXTI_InitStructure); // 初始
EXTI_InitStructure.EXTI_Trigger的赋值可选项:
EXTI_Trigger_Rising---表示电压从高下降到低于设定阀值时产生中断;
EXTI_Trigger_Falling---表示电压从低上升到高于设定阀值时产生中断;
EXTI_Trigger_Rising_Falling---表示电压上升或下降越过设定阀值时都产生中断。
2)、当工作电压低于设定阀值时,将产生PVD中断,在中断程序中进行相应的处理:
void PVD_IRQHandler(void)
{
EXTI_ClearITPendingBit(EXTI_Line16);
…… // 用户添加紧急处理代码处
}
5、STM32上不使用外部晶振,OSC_IN和OSC_OUT的接法
1)、对于100脚或144脚的产品,OSC_IN应接地,OSC_OUT应悬空。
2)、对于少于100脚的产品,有2种接法:
2.1)、OSC_IN和OSC_OUT分别通过10K电阻接地。
此方法可提高EMC性能。
2.2)、分别重映射OSC_IN和OSC_OUT至PD0和PD1,再配置PD0和PD1为推挽输出并输出‘0’。
此方法可以减小功耗并(相对上面2.1),并节省2个外部电阻。
Interrupt/Evens
1、NVIC的优先级概念占先式优先级 (pre-emption priority):
高占先式优先级的中断事件会打断当前的主程序/中断程序运行— —抢断式优先响应,俗称中断嵌套。
副优先级(subpriority):
在占先式优先级相同的情况下,高副优先级的中断优先被响应;
在占先式优先级相同的情况下,如果有低副优先级中断正在执行, 高副优先级的中断要等待已被响应的低副优先级中断执行结束后才 能得到响应——非抢断式响应(不能嵌套)。
2、判断中断是否会被响应的依据
首先是占先式优先级,其次是副优先级;
占先式优先级决定是否会有中断嵌套;
Reset、NMI、Hard Fault 优先级为负(高于普通中断优先级)且不可调整。
3、STM32中用到的Cortex-M3寄存器说明
在STM32中用到了Cortex-M3定义的三组寄存器,有关这三组寄存器的说明不在STM32的技术手册中,需要参考ARM公司发布的Cortex-M3 Technical Reference Manual (r2p0)。
在STM32的固件库中定义了三个结构体与这三个寄存器组相对应,这三个结构体与ARM手册中寄存器的对应关系如下:
1)、NVIC寄存器组
STM32的固件库中有如下定义:
typedef struct
{
vu32 ISER[2];
u32 RESERVED0[30];
vu32 ICER[2];
u32 RSERVED1[30];
vu32 ISPR[2];
u32 RESERVED2[30];
vu32 ICPR[2];
u32 RESERVED3[30];
vu32 IABR[2];
u32 RESERVED4[62];
vu32 IPR[11];
} NVIC_TypeDef;










 工商网监
工商网监
评论