 自动驾驶辅助系统性能评估软件MXeval5.0更新:精准泊车
自动驾驶辅助系统性能评估软件MXeval5.0更新:精准泊车
自动驾驶辅助系统性能评估工具MXeval现在终于可以决定谁停车停得更好了,是男是女,还是机器?亲自在最新的Park Assist library寻找答案吧~通过重新升级的MXevalApp Manager,其相对应的主观问卷现已可以秒速上传到您的平板电脑上。
功能与资料库更新
最新版自动驾驶辅助系统性能评估软件MXeval包含了功能升级,bug修复以及评估资料库的更新。
提示:该升级需要更新您的license文件,所需license版本为5.0,如您有有效售后支持合同,请联络北汇升级需求。
功能更新
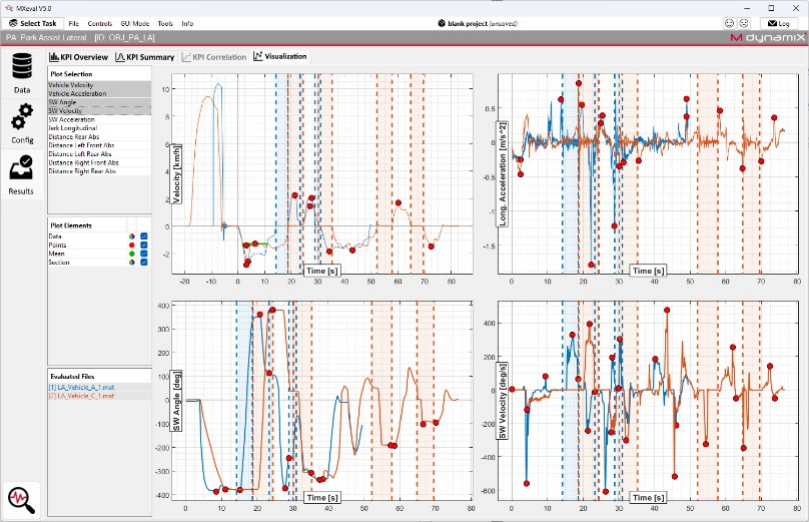
Park Assist Library
自动驾驶辅助系统性能评估工具MXeval新的Park Assist library可以对横向和纵向停车情况进行评估。这个工具箱还附带了一个新的地面实况工具箱,专门用于从GNSS和环境物体数据中计算停车距离。
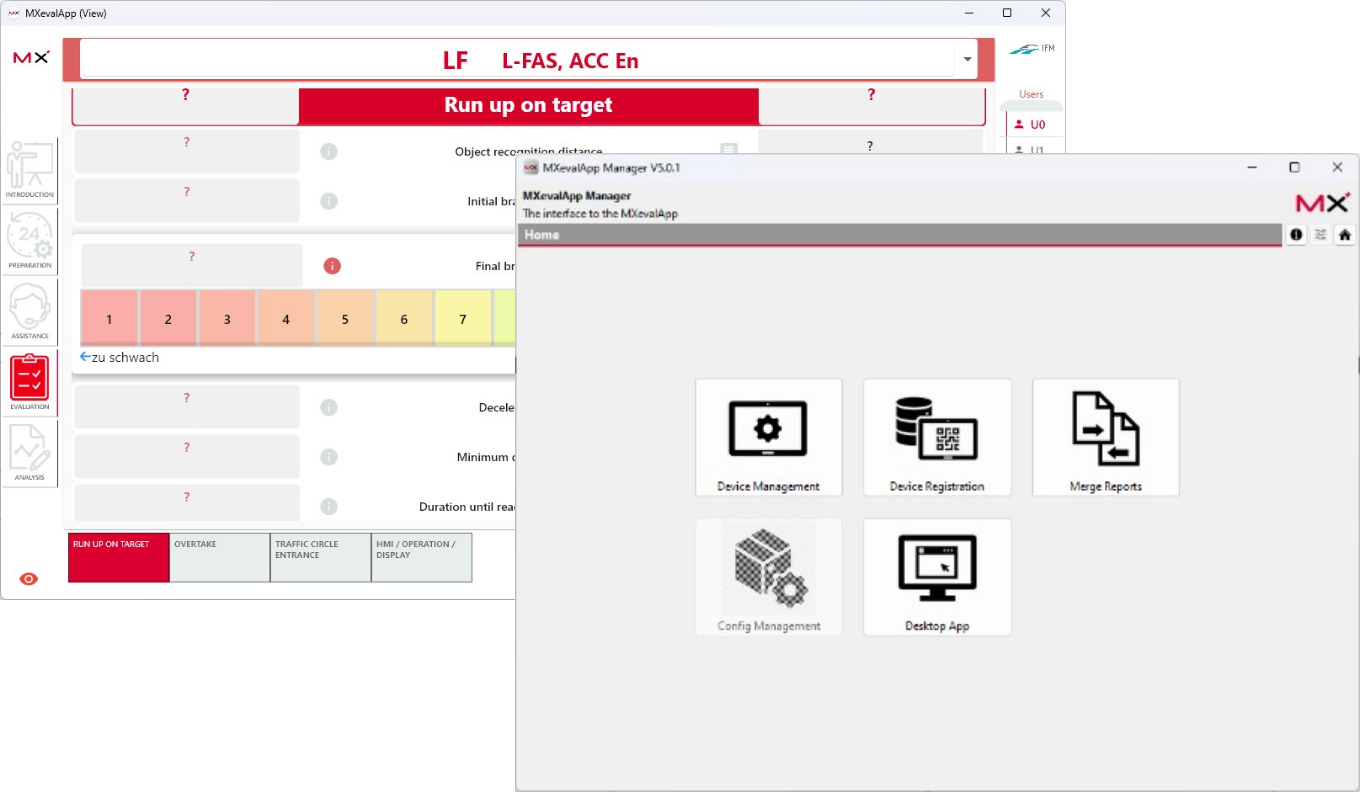
MXevalApp Manager
MXevalApp Manager功能从MXeval V4.1就发布了,当前全新设计为可以完全独立使用的版本。现在它可以处理配置与报告数据的管理,其MXevalApp安装与设备注册都可以通过扫码二维码的方式即可完成。此外,新版的MXevalApp Manager已包含MXevalApp本身的Windows版本(视图模式)。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自动驾驶
+关注
关注
773文章
13027浏览量
163200 -
ADAS系统
+关注
关注
4文章
195浏览量
25561 -
系统
+关注
关注
1文章
981浏览量
21035
发布评论请先 登录
相关推荐
未来已来,多传感器融合感知是自动驾驶破局的关键
驾驶的关键的是具备人类的感知能力,多传感器融合感知正是自动驾驶破局的关键。昱感微的雷视一体多传感器融合方案就好像一双比人眼更敏锐的眼睛,可以为自动驾驶系统提供更丰富更
发表于 04-11 10:26
基于实车在环(ViL)的自动驾驶功能一致性评估
作者|Br1anQ、Chrans小编|不吃猪头肉引言自动驾驶功能的开发和评估在汽车行业内已经很常见了。尤其是自动泊车功能,其低速和小范围操作使得更容易用


自动泊车和遥控泊车的区别
随着科技的快速发展,汽车行业也在不断的创新与进步。自动驾驶技术是其中的一个重要方向,而自动泊车和遥控泊车作为自动驾驶的子技术之一,受到了广大
特斯拉3D鸟瞰式泊车辅助系统推出,引入高精度3D场景重建功能
现在,漫长的等待终于告一段落。特斯拉自动驾驶软件负责人Ashok Elluswamy宣布,“高级泊车辅助”将作为节日更新的一部分,推送给尚未
农机自动驾驶显示系统组成部分以及配置
不开农机自动驾驶系统这个概念的。
农机自动驾驶主要是通过软硬件同步协调一致达到自动驾驶的目的,硬件部分包括:电动方向盘、卫星信号接收器、角度传感器、高精度定位模块以及平板显示
发表于 10-17 17:52
【KV260视觉入门套件试用体验】八、VITis AI自动驾驶多任务执行MultiTask V3
是一种模型,旨在同时执行自动驾驶场景中的不同任务,同时实现优异的性能和效率。这些任务包括对象检测、分割、车道检测、可行驶区域分割和深度估算,这些都是自动驾驶感知模块的重要组成部分。
三、代码实现
发表于 09-26 16:43
自动驾驶如何落地 自动驾驶的商业模式与挑战
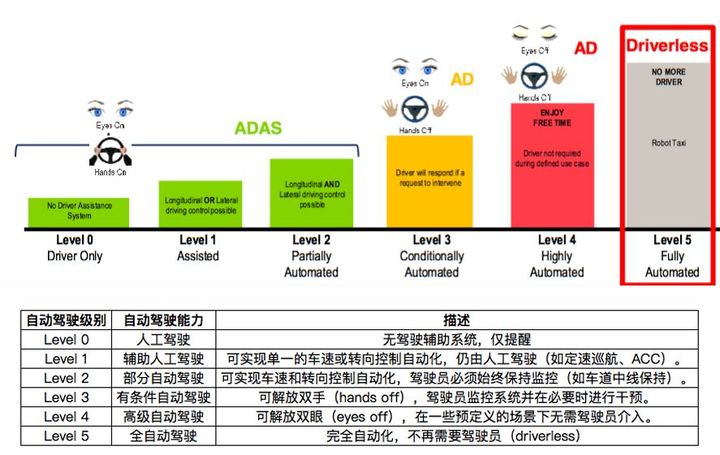
依据于自动驾驶系统对汽车的控制程度,SAE将自动驾驶划分成6个等级:
L0:无自动驾驶(非自动化),汽车的控制权完全由
发表于 06-02 15:23
•0次下载

自动驾驶算法软件架构介绍
自动驾驶技术是一个庞大的工程体系,软件架构、功能算法、控制规划、感知识别、建图定位、电气架构、车载控制器、验证
体系等等,有太多的角度可以去切入。对于自动驾驶功能与算法开发,自动驾驶
发表于 06-01 14:41
•1次下载
ADAS辅助驾驶——NOA自动辅助导航驾驶
功能的本质意思是把“导航”和“辅助驾驶”结合。在原来L2辅助驾驶的基础上(如车道线保持、自动跟车),加上车机的导航信息(如地图
基于自动泊车的自动驾驶控制算法设计与研究
介绍了自动泊车系统的硬件架构,在此基础上,对自动泊车控制算法进行了设计与研究,包括APA算法功能需求分析,APA控制






 工商网监
工商网监
评论