 AGV小车是如何通过AGV激光导航仪识别反光柱坐标
AGV小车是如何通过AGV激光导航仪识别反光柱坐标
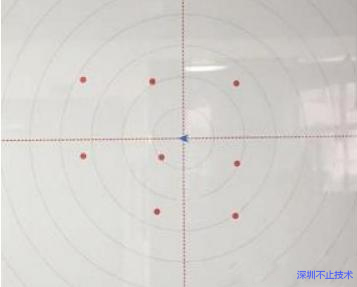
AGV小车定位原理——识别反光柱坐标
通过过滤反射系数,可以得到同一反光柱上多个激光点的详细数据(角度、距离、反射系数)。然后通过简单的数学计算和规律分析,就可以得到该反光柱相对导航仪的准确坐标。
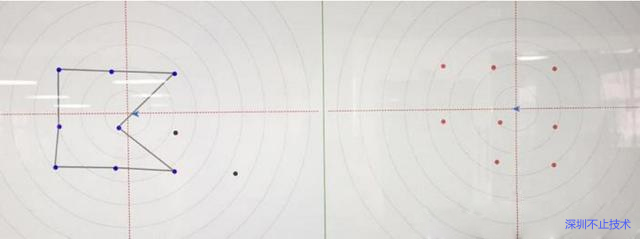
AGV叉车定位原理——定位匹配
想要获得AGV激光导航仪坐标和角度,必须同时满足以下2个条件:
①AGV叉车导航仪至少可以扫描到3个反光柱
②叉车AGV导航仪扫描到的多个反光柱构成的图形,在已有地图数据中,可以成功匹配到相同构形。利用已有地图数据,结合即时扫描的反光柱坐标,反推出AGV导航仪位姿。
深圳市不止技术有限公司是激光雷达行业头部知名企业,团队自2016年底就开始了多款激光雷达方案的研发,并创造了30多件发明专利,我们作为激光雷达行业5年多的资深老兵,对激光雷达有着深厚的技术积累。是一家能提供单点、单线到多线全系列、dtof、itof全品类激光雷达方案定制化的公司,而且掌握了机器人移动底盘技术。在激光雷达核心硬件、专用芯片、AI算法上具有完整的自主知识产权
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达
+关注
关注
961文章
3643浏览量
186630 -
激光系统
+关注
关注
0文章
147浏览量
9321
发布评论请先 登录
相关推荐
更智能更柔性化,AGV导航方式的创新与演进!
AGV小车实现高效、低成本、安全的物料运输,是制造工厂和仓库改进运营的重要措施。AGV导航技术不断发展,从固定路径到自由路径导引,提高了环境适应性。

AGV小车行驶过程中需要暂停时该如何做?
AGV AGV也称为自动搬运车,它在导航装置的引导下进行自动移动,无需驾驶员就可以在不同的制造站点和仓库站点之间移动,以实现自动化搬运,提高效率和生产率,减少人工成本和产品损坏的目的。目前,已经

工业4G路由器:实现AGV小车通信畅通的秘密武器
AGV小车的主控制器通常是通过PLC来编程,由于AGV小车是一直处于实时移动状态的,中控室主控计算机采用线缆的方式与
智能化升级:科智立RFID AGV地标传感器助力AGV小车升级改造
引言 在这个日新月异的信息化时代,各行各业都在不断进行升级改造,以求在激烈的市场竞争中立于不败之地。其中,智能化升级是提升企业核心竞争力的重要手段。本篇文章将以AGV小车的智能化升级为话题,深入探讨

反光柱导航开发与实验
VEnus算法对于反光柱导航的基本思路,其主要分为了高反点提取、高反点聚类查找中心、高反点与已知反光柱位姿匹配以及调用ceres库进行位姿优化等步骤。


【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
、反射板等),而是通过工作场景中的自然环境。如:仓库中的柱子、墙面等作为定位参照物以实现定位导航。
**
2、激光反射板导航**
激光
发表于 06-28 09:52

AGV和AMR是什么关系?AGV采用了哪些关键的导航技术?
与电磁导航相类似的是基于磁条的AGV导航技术。不同之处在于,后者的磁条是铺在地面上而不是埋在地下。基于磁条的AGV导航的优点是
发表于 05-10 17:33
•955次阅读
AGV导航常见的5种方式
AGV全称是Automated Guided Vehicle,意思是“自动导引运输车”。AGV是装备有电磁、光学或其它自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输小车






 工商网监
工商网监
评论