 路基自动驾驶的内涵与技术路线
路基自动驾驶的内涵与技术路线

近日,第六届国际智能网联汽车技术年会(CICV2019)在北京亦庄的亦创国际会展中心举办。会议期间,中国交建智能交通研发中心副主任朱弘戈博士针对路基自动驾驶的内涵与技术路线进行了分享。(本文根据分享内容整理)
01
引言
近年来自动驾驶技术迅猛发展。目前,高级别自动驾驶解决方案基本采用“感知-决策-执行”链条。众多知名企业对于感知的解决方案不尽相同,但无论类似特斯拉的视频方案还是像Waymo的激光雷达方案,这些单车感知方案均存在感知距离有限、遮挡性盲区等问题。换言之,人工驾驶存在的问题单车自动驾驶解决方案依然存在,单车智能技术路线存在的问题逐渐暴露,主要存在的问题有:
1. 无法全面重现行驶环境,特别是盲区问题;
2. 复杂场景下算法准确率低,与人的判断差距很大;
3. 单车制造成本居高不下,难于产业化发展;
4. 道路资源利用率低;
5. 特定场景缺乏组织调度,难于实现自协调。
因此,自动驾驶技术的发展逐渐从单车智能走向车路协同。交通运输部高度重视自动驾驶和车路协同等前瞻性技术的发展和应用,提出“以智慧交通建设为载体,按照车路协同发展的技术路径,积极推进自动驾驶的发展”。针对自动驾驶、车路协同、新一代交通控制网等方面,部署开展了大量的研究和开发工作。力求形成技术研发、产业示范、标准支撑、良性发展格局。
02
内涵
路基自动驾驶是指基于道路的车路协同式自动驾驶。根据道路和车辆的智能化水平划分为不同的发展阶段,实现车辆的自动驾驶技术与道路智能化技术协同发展,最终形成新一代交通控制与运行系统,实现交通运输转型升级。

路基自动驾驶是以道路智能化技术(Intelligent Road Technology) 、车辆自动驾驶技术(Autonomous Driving Technology) 、路运一体技术(integrated control and operation technology of road and transportation) 为核心,以运行保障体系(Operation guarantee system) 为基础,实现不同业务场景下的自动驾驶。

03
框架
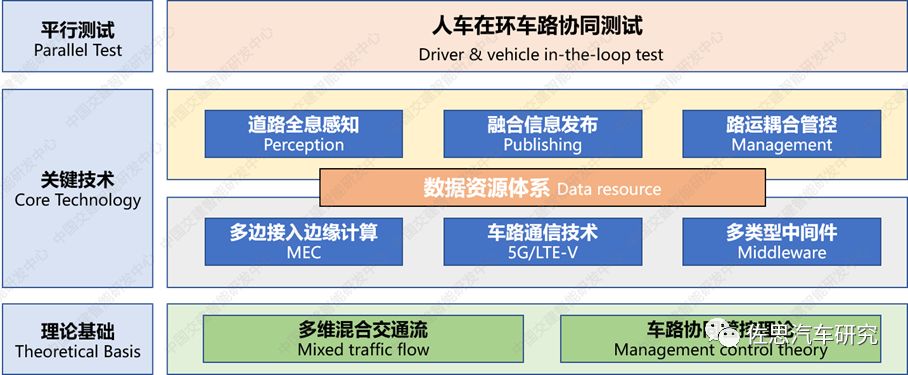
路基自动驾驶的体系如图所示,多维混合交通流和柔性专用车道管理是路基自动驾驶的理论基础。MEC(多边接入边缘计算)、5G/LTE-V(车路通信技术)、 Middleware(多类型中间件)构成了其关键技术的通用技术骨架。道路全息感知技术、多维融合信息发布技术和路运耦合管控技术组成了应用技术框架。人车在环车路协同测试是必要的测试验证手段。综上,形成完整的路基自动驾驶的技术框架。
道路全息感知与智能发布
路侧感知和车侧感知相互融合可以形成综合交通环境感知体系,能够解决单车自动驾驶的视觉盲区问题,同时使自动驾驶车辆拥有了超视觉感知功能。
路侧感知即道路全息感知重点工作在于两个方面:一是采用更加多样化的感知手段,二是实现多源时空数据的融合;进而形成道路全息感知体系。
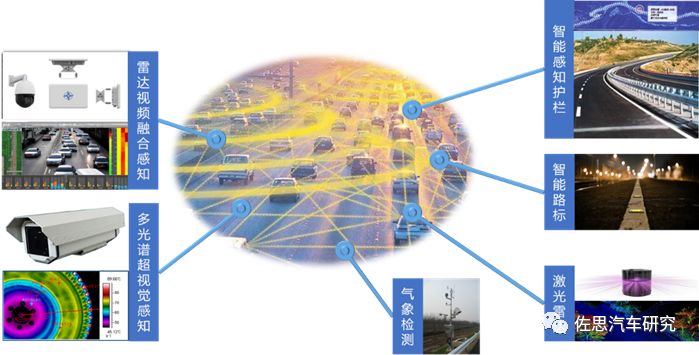
新技术的应用带来感知手段的升级,例如雷达视频融合感知、多光谱超视觉感知、激光雷达等。随着感知手段的增多,对于多源时空数据的融合就更加关键。数据融合分为:数据层融合、特征层融合和决策层融合。道路多源时空数据应该是特征层融合。
在路基自动驾驶技术体系中,路侧的多维融合信息发布技术是不可或缺的关键技术之一。多维,是信息发布的机制和对象两个维度相互叠加,如图所示。

在以无人驾驶为发展目标的技术演进过程中,信息应该是经过梳理,逐渐分化为驾驶人接受的信息和车辆控制系统接受的信息,另一方面,从信息的推送机制上,应该分为区域广播信息和精准推送的个性化服务。
不同的信息在多维融合信息发布体系中就有不同的实现途径,例如:受天气影响的路面的性能,将会被区域广播至附近行驶的车辆的控制系统;特定车前方障碍物信息被精准推送至车辆的控制系统;行驶路径周边服务信息会被精准地推送给驾驶人。
路运耦合管控技术
路运耦合管控技术旨在通过先进的技术手段将道路和营运车辆进行综合管控。中国交建智能交通研发中心在充分调研国内外技术发展路径的基础上结合中国交建在智能交通领域的产业发展路线,认为路运一体的发展进程分为三个发展阶段。这三个阶段分别是:“传统业务组合”阶段、“路运管控服务的深度耦合”阶段、“路运一体化协同优化”阶段。
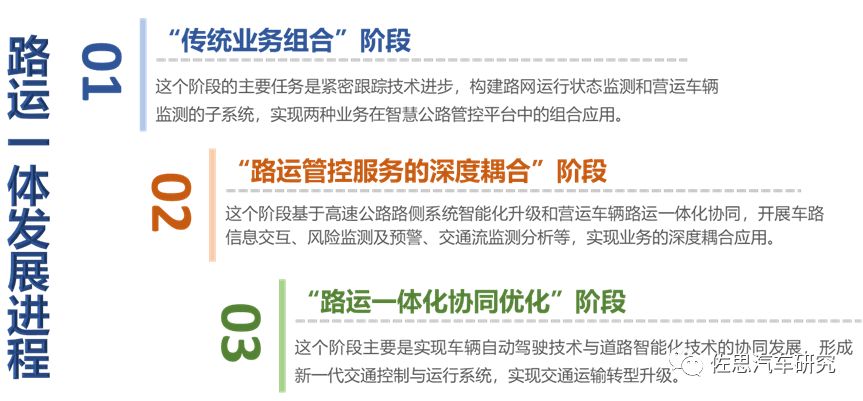
这三个阶段分别是车和路的弱耦合、中等耦合、强耦合阶段。在不同的阶段需要技术攻关的方向不尽相同。
“路运管控服务的深度耦合”阶段处于车路通信逐渐建立,车路协同技术路径摸索中前进的阶段。应该重点探索不同车辆在不同道路场景下的车路协同需求。“路运一体化协同优化”阶段,则是已经实现了车路协同技术的基础应用,网联车具有一定密度,自动驾驶蓬勃发展。此时,可以探讨通过车路互动实现交通控制,实现车侧路侧的协同决策。研发中心提出了几个重点攻关方向,例如:通过网联车实现整个道路交通状态的感知;利用网联车的速度引导,实现运输通道重点路段的交通流控制,使其更加平稳高效;开展路基自动驾驶的落地应用。
人车在环车路协同测试
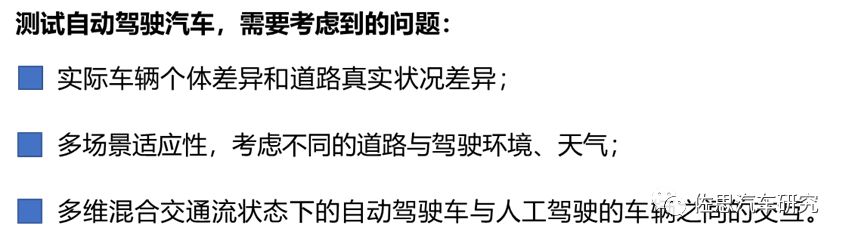
路基自动驾驶技术的实际应用落地,离不开最重要的环节——测试。目前的自动驾驶算法需要大量的数据进行训练,绝大部分厂家在路测的同时结合仿真测试以寻求最短时间内得到最优结果。全国各地纷纷建设智能网联汽车测试基地,很多城市也都出台了相应的开放道路测试条例。但是封闭的测试场地没有真实的道路环境,开放的测试区域又往往都是交通量小、交通场景简单的区域。测试多维混合流条件下的车辆的系统稳定性和行驶安全性是十分困难的。
人车在环车路协同测试系统,利用真实数据在虚拟环境中建立对应的仿真测试环境,进行测试和评价。通过实际地图数据搭建仿真环境中的测试路网,根据实测的交通检测器数据在仿真环境中还原真实交通状态,将控制算法写入虚拟控制中心内,通过通信模块实时获取测试车辆数据,即可实现控制算法的测试。

04
应用
多维混合交通流将长期存在
交通技术一定要首先明确交通的组成,要深入剖析该技术的应用背景,才能够判断理论技术与实际应用的匹配程度。随着技术的发展,汽车将由人工驾驶&非网联阶段转变为无人驾驶&网联阶段。但是技术演进逐渐分化为不同路线,部分车辆向网联化迁移,另一部分向无人驾驶迁移。因此,多维混合交通流将长期存在。

在混合交通中,由于不同车辆的动力特性,行驶速度,安全需求等特点不同,造成了极其复杂的交通环境。多维混合交通流的运行特性与单一车流存在较大的差异。
专用车道管理是多维混合交通流阶段的必由之路
专用车道管理能够从时间、空间的不同维度进行路权划分,保证部分车辆的优先通行权,目前典型应用常见于公交车专用道、HOV专用车道、有轨电车专用道、拥堵区车道划分等领域。但是在车路协同的技术背景下,随着技术的不断发展,专用车道的管理由时间空间静态划分转变成为柔性动态划分成为可能。
柔性车道管理技术是一种动态的专用道管理技术。这种技术摒弃了传统环境下的刚性的管理,而是基于车路协同的环境充分挖掘道路的利用空间,用柔性的管理平衡系统最优和用户最优两种选择。
柔性动态的管理手段有清空距离划分、时段划分、应急状态划分。采用柔性专用道管理技术可以
1.提高专用道时空资源利用率
2.实现特殊车辆快速通行
3.保障特殊车辆行程时间稳定性
05
结语
随着路基自动驾驶技术的逐渐推广,应急管理、交通事件管理、恶劣天气、施工占道等领域都会产生变革。运行保障措施得到进一步升级。例如,利用道路全息感知技术,第一时间感知交通事件,判断类型和严重程度,协同规划决策,让救援车辆以最快速度到达现场,实现快速精准救援。
基于运行保障体系,面向应用业务场景,应用路基自动驾驶技术,一定可以实现交通运输行业的全面升级,提升运输效率、降低运输成本、保障运营安全。中国交建智能交通研发中心将继续深入研究和攻关各项关键技术,积极与行业内伙伴诚挚合作,共同推进新一代智能交通运输系统的发展。
-
传感器
+关注
关注
2573文章
54366浏览量
785984 -
自动驾驶
+关注
关注
791文章
14668浏览量
176475 -
智慧交通
+关注
关注
5文章
786浏览量
27871 -
MEC
+关注
关注
0文章
119浏览量
20356
原文标题:路基自动驾驶的内涵与技术路线
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
不同等级的自动驾驶技术要求上有何不同?
低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

自动驾驶技术测试有哪些?

自动驾驶技术落地前为什么要先测试?
自动驾驶安全基石:ODD
萝卜快跑在香港的自动驾驶测试区域再扩大

自动驾驶经历了哪些技术拐点?

NVIDIA Halos自动驾驶汽车安全系统发布
激光雷达技术:自动驾驶的应用与发展趋势

沃尔沃与Waabi携手开发自动驾驶卡车
2024年自动驾驶行业热点技术盘点
从《自动驾驶地图数据规范》聊高精地图在自动驾驶中的重要性






 工商网监
工商网监
评论