 如何基于深度神经网络设计一个端到端的自动驾驶模型?
如何基于深度神经网络设计一个端到端的自动驾驶模型?

如何基于深度神经网络设计一个端到端的自动驾驶模型?如何设计一个基于增强学习的自动驾驶决策系统?简述算法设计思路。
【问题1】
如何基于深度神经网络
设计一个端到端的自动驾驶模型?
分析与解答
本题属于开放性设计题,回答者需要了解自动驾驶模型的基本功能和研发中涉及到的主要问题,并结合深度学习领域的相关知识给出设计方案。
自动驾驶模型是自动驾驶系统的重要组成部分,其在功能上试图模仿人类司机,通过给定当前的车辆状态和周围环境信息,输出为对车辆控制信号。传统的驾驶模型设计方法人为地将自动驾驶任务分解成车道识别、场景抽象、路径规划和控制决策等多个子任务,然后再根据各个子任务的输出,通过人工定义的规则来控制汽车的前进;而通过建立从输入信号到输出信号的端到端模型,可以
无需引入大量的人工规则来控制汽车的行驶;
使整个自动驾驶系统的结构更加简单、高效;
使模型自主地学到人没有指定的子任务。
而对于端到端驾驶模型的具体设计,这里介绍业界较有影响力的工作——Nivdia于2016年提出的PilotNet模型以供参考。
PilotNet模型是一个端到端的深度神经网络,可以在自动驾驶系统中控制车辆前进的方向。模型根据安装在汽车挡风玻璃前的三个摄像头采集到的原始图片,通过深度神经网络学习出汽车前进所需要转动的角度。其整体架构如 Fig. 2 所示 [3]。
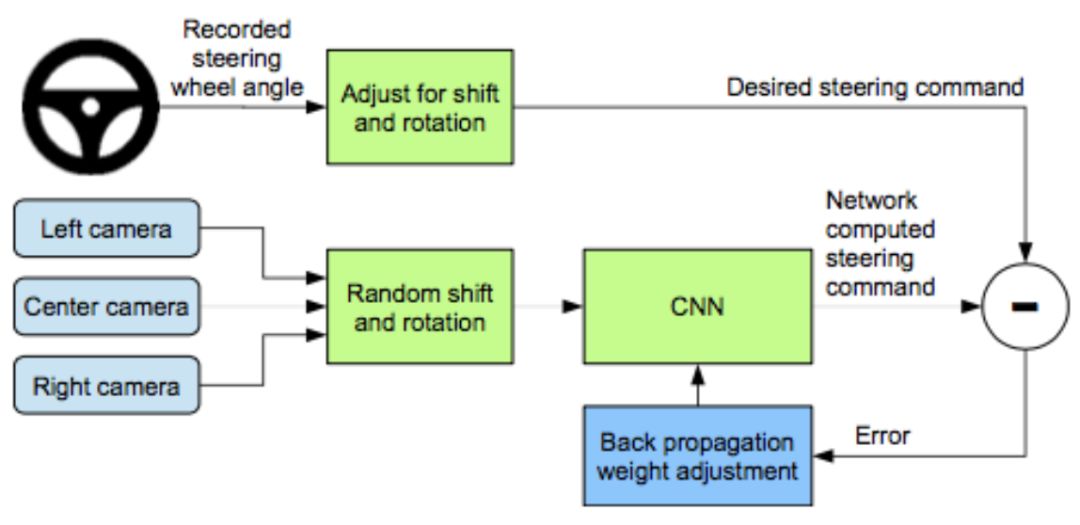
Figure 1:Nivdia端到端的自动驾驶系统
PilotNet是一个9层神经网络,由1个归一化层(Normalization Layer)、5个卷积层(Convolutional Layer)和3个全连接层(Fully Connected Layer)组成,如 fig. 3 [4] 所示。模型的输入为映射到YUV平面的原始输入图像,输出为车辆前进需要偏转的方向。网络的前三个卷积层采用5*5的卷积核,后两个卷积层采用3*3的卷积核。训练数据包含在不同类型道路上(高速公路、住宅区的街道、乡间小路等)、不同光线强度、不同天气条件下的真实的汽车行驶过程中收集到的视频采样图片。
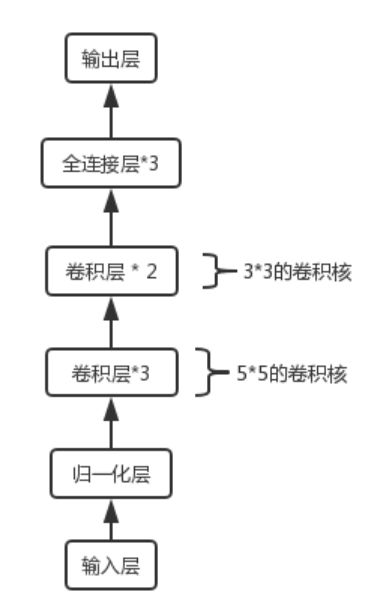
Figure 2: PilotNet网络结构图
PilotNet在模拟仿真和实际路测均取得较好的实验结果。实验中定义车辆自动化程度为评测指标,即:
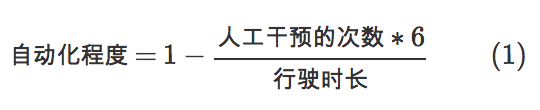
模拟系统中车辆偏离道路中心线超过一米时会发生一次人工干预,并假设人工干预平均需要消耗的时间约为6s/次。PilotNet模型在仿真系统上的评测结果为90%,路测指标可以达到98%。
【问题2】
如何设计一个基于增强学习的自动驾驶决策系统?
简述算法设计思路
分析与解答
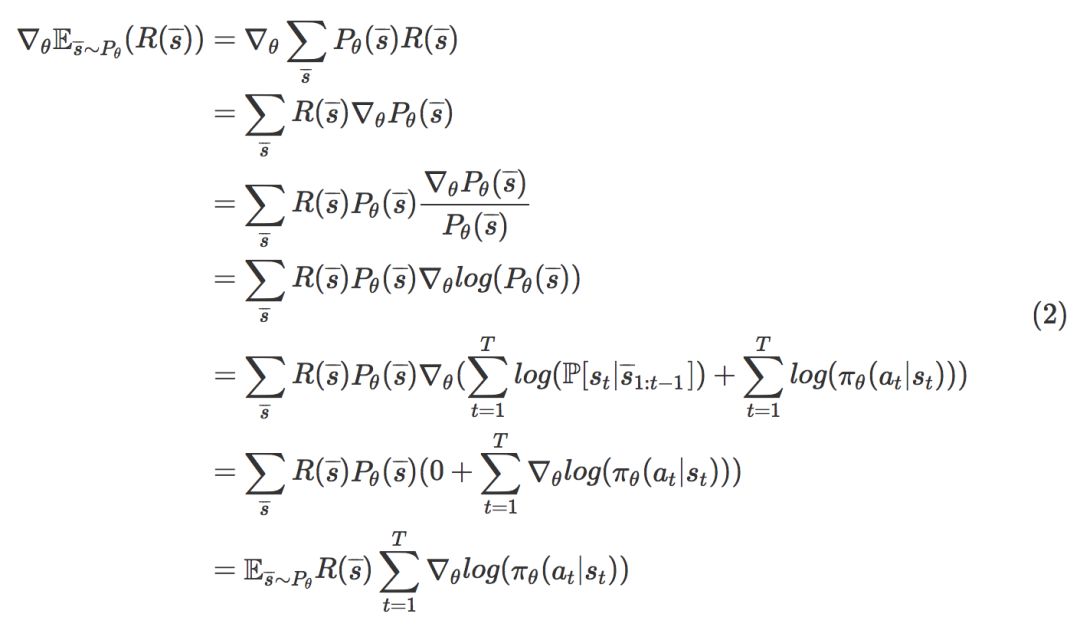
传统的自动驾驶决策系统多数采用人工定义的规则,但是人工定义的规则不够全面,容易漏掉一些边界情况,因而会考虑采用增强学习的原理设计一个自动驾驶的决策系统,使自动驾驶的决策系统能从数据中自动学习并优化自身的决策过程。
对于这一问题的解答可以参考Mobileye提出的基于增强学习的多智能体决策系统 [5] 。自动驾驶的决策系统不同于传统的机器人决策系统:首先,其属于多智能体的场景,其他智能体的行为难以预测,并会对主智能体的行为造成影响;其次,在决策中需要确保策略的安全性,安全地处理意料之外的场景,防止交通事故的发生。
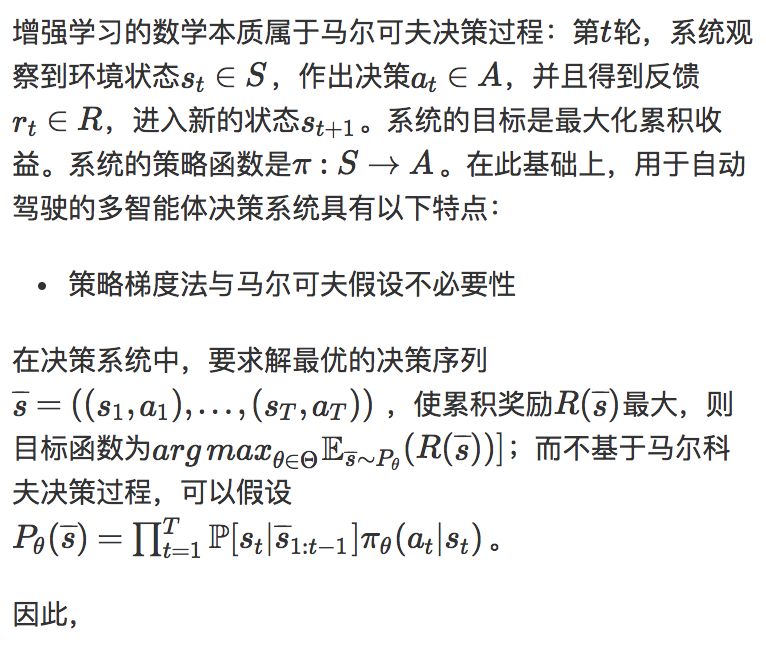
所以,


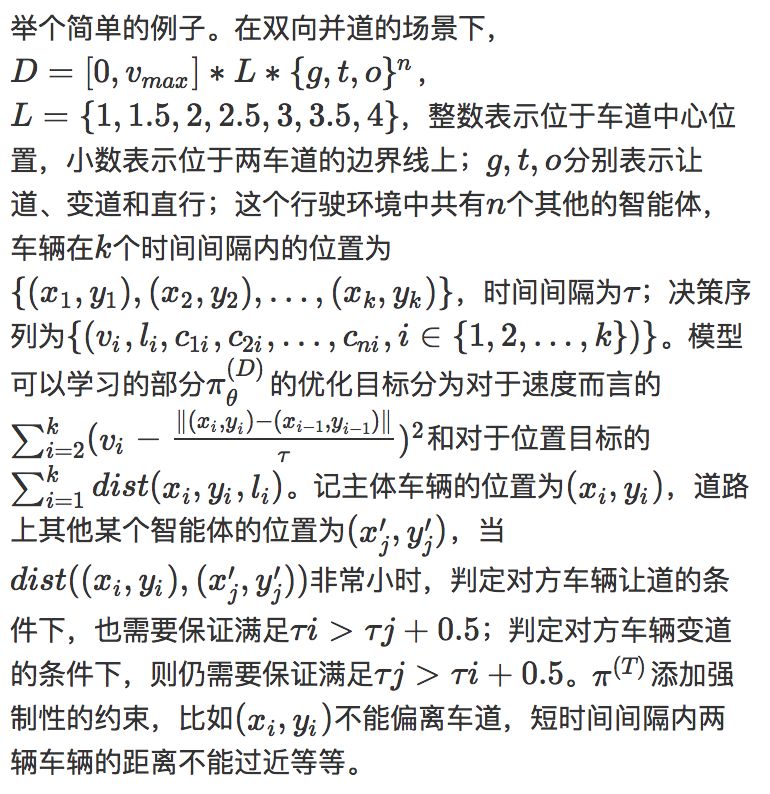
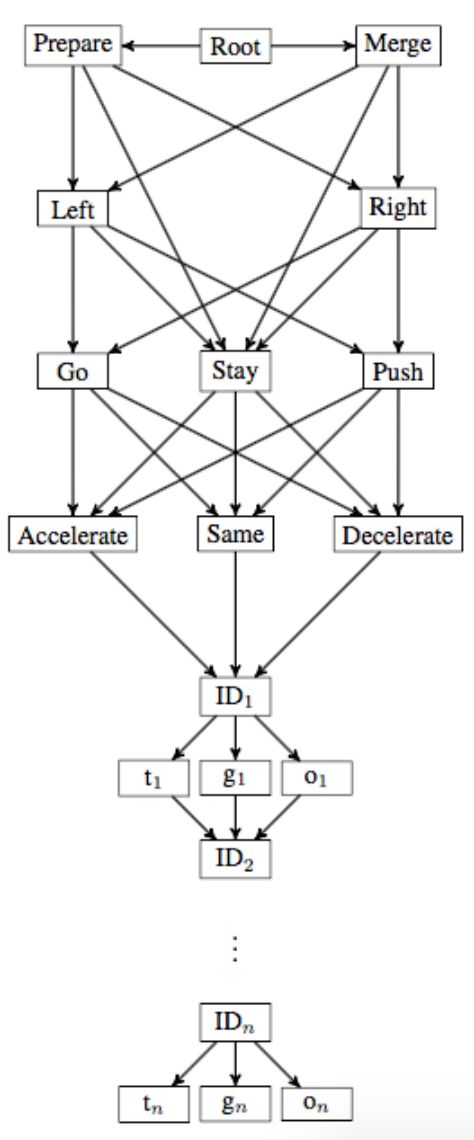
Figure 3: 双向变道决策过程的DAG
扩展与总结
自动驾驶系统极其复杂,本章所涉及的内容仅仅涵盖了其中一部分研发问题与进展。深度学习在自动驾驶领域的应用在图像识别、场景分割等计算机视觉相关领域中较为广泛与深入,而在控制、决策方面的应用还处在初步的尝试阶段。通过本章的介绍,希望大家能够初步了解深度学习在自动驾驶系统中的应用现状与主流应用方式,而更深入的学习了解则请阅读相关参考文献。
-
自动驾驶
+关注
关注
791文章
14669浏览量
176486
原文标题:两道算法工程师的面试题,80%的人答不上来
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
自动驾驶中常提的卷积神经网络是个啥?


一文读懂特斯拉自动驾驶FSD从辅助到端到端的演进


端到端自动驾驶相较传统自动驾驶到底有何提升?

一段式端到端在自动驾驶中到底有何优势?


为什么自动驾驶端到端大模型有黑盒特性?


自动驾驶中基于规则的决策和端到端大模型有何区别?

DiffusionDrive首次在端到端自动驾驶中引入扩散模型






 工商网监
工商网监
评论