 中科院上海硅酸盐所/新加坡国立大学:研发多自由度高灵敏柔性压离子传感器
中科院上海硅酸盐所/新加坡国立大学:研发多自由度高灵敏柔性压离子传感器

人体运动捕捉在生物力学评估、沉浸式VR/AR等领域需求迫切。传统光学式与惯性式运动追踪技术成本高、校准复杂且长期佩戴不适。柔性弯曲传感器作为新兴解决方案,其中的电阻式、电容式与压电式类型存在持续耗电、信号易受干扰或仅响应动态刺激等限制。柔性压电离子传感器兼具柔软、自供能、动静态响应等优势,却长期受制于灵敏度低、感应范围窄,以及单一自由度响应的问题,严重制约其在复杂人体运动捕捉中的实际应用。因此,开发兼具超高灵敏度、宽检测范围及多自由度运动分辨能力的压离子传感器至关重要。
中科院上海硅酸盐研究所孙静研究员团队的王冉冉研究员和程荫特聘研究员与新加坡国立大学Ho Ghim Wei教授进行合作,通过材料与结构的双重设计,开发出一款具备高灵敏度、可实时解析人体复杂动作的SPIM柔性压离子传感器。材料上,借助离子-偶极相互作用促进离子通道形成,空间位阻效应放大正负离子迁移率失衡,协同实现3.2 mV/度的超高灵敏度;结构上,采用四棱柱纤维搭配对称纳米网格电极,实现多弯曲自由度解耦,精准识别屈伸、展收、环转等复杂肢体动作。该传感器进一步展示了手部动作的数字孪生以及基于单关节操控的复杂VR交互,将超高灵敏度、宽角度响应与多自由度分辨集成于紧凑可穿戴形态,有望在穿戴式元宇宙界面交互领域获得应用。相关研究以“Ultrasensitive multi-degree-of-freedom piezoionic sensor via synergistic hydrogel-ion interactions”为题发表于最新一期国际期刊《Nature Communications》。论文第一作者是方悦博士、欧阳昊硕士与程荫特聘研究员,通讯作者为程荫特聘研究员、Ho Ghim Wei教授和王冉冉研究员。
图文解析
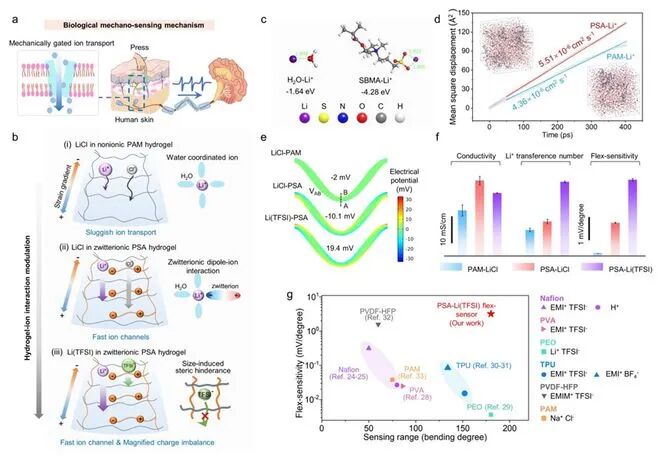
图1. SPIM柔性传感器的设计及超高灵敏度的机理分析
围绕SPIM传感器的设计逻辑与超高弯曲灵敏度机理,图1呈现了从生物启发到性能突破的路径。图1a描述了人体皮肤机械感受器的离子门控传输机制。图1b中对比了三种水凝胶-离子组合体系,其中两性离子水凝胶-无机盐(PSA-LiCl)通过偶极-离子相互作用构建独立迁移通道提升了离子迁移效率,而两性离子水凝胶-有机盐(PSA-Li (TFSI))则借助聚合物-离子双重作用实现了超高灵敏度。密度泛函理论计算显示(图1c),Li+与PSA中SBMA基团的结合能(-4.3 eV)低于与水分子的结合能(-1.6 eV),分子动力学模拟证实PSA水凝胶中离子扩散系数更高(图1d),有限元仿真呈现了PSA-Li (TFSI)体系更显著的电势差(19.4 mV)(图1e)。图1f性能对比表明各项指标均优于传统压离子传感器及其他机制传感器(图1g)。
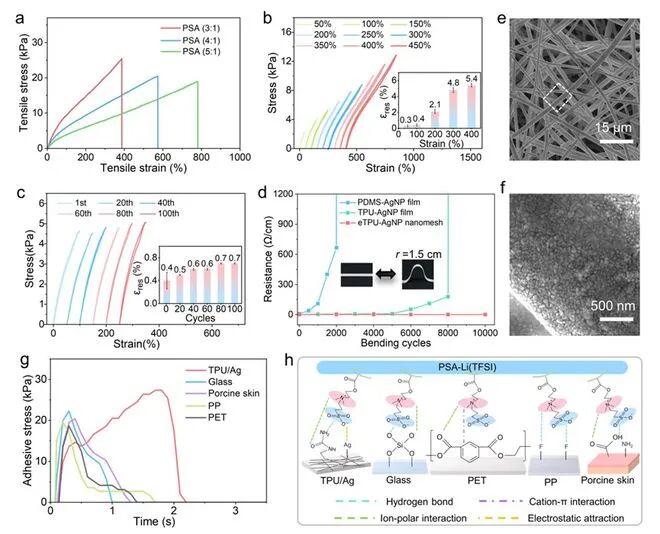
图2.机械/电气韧性与界面韧性
研究聚焦传感器的结构稳定性与界面兼容性,通过水凝胶力学性能优化、电极设计及界面作用分析,保障传感器长期使用的可靠性。水凝胶力学优化方面,PSA水凝胶杨氏模量达14 kPa(图2a),兼具柔软性与支撑性,在50%-450%应变范围内循环拉伸后残余应变极小(图2b、2c),展现出优异的回弹能力。电极设计上,采用静电纺丝结合真空蒸镀制备的eTPU-AgNP纳米网电极,具有优异电机械稳定性(图2d)。界面粘附性方面,PSA-Li (TFSI)水凝胶与电极的粘附强度高达27 kPa,粘附力源于氢键、离子-极性相互作用、静电引力等多重作用,确保传感器与皮肤或器件的稳定结合。
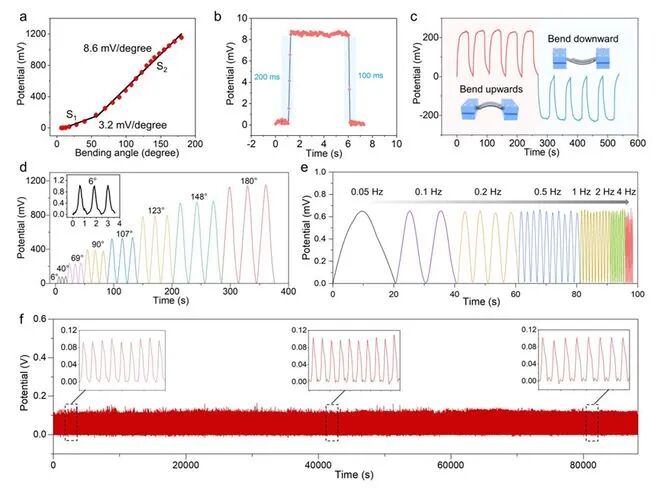
图3. PSA-Li(TFSI)的传感性能
图3系统展示了SPIM传感器的关键传感指标。在灵敏度与检测范围上(图3a),输出电势随弯曲角度呈两段线性增长,60度以下灵敏度为3.2 mV/度,60-180度提升至8.6 mV/度,宽角度范围充分覆盖人体关节运动需求。响应时间为200 ms,恢复时间100 ms,快速响应特性满足实时运动监测场景(图3b),并且具有上下弯曲方向识别能力上(图3c)。信号重复性测试中(图3d),在6-180度弯曲时信号一致性良好,即使6度微小弯曲也能产生稳定可分辨的信号。频率适应性上(图3e),在0.05-4 Hz频率范围内均能有效捕获,覆盖人体关节日常运动的频率范围。长期稳定性测试表明(图3f),40度弯曲角度下经过 10,000次循环后,输出电势无明显衰减,展现出可靠的耐用性。
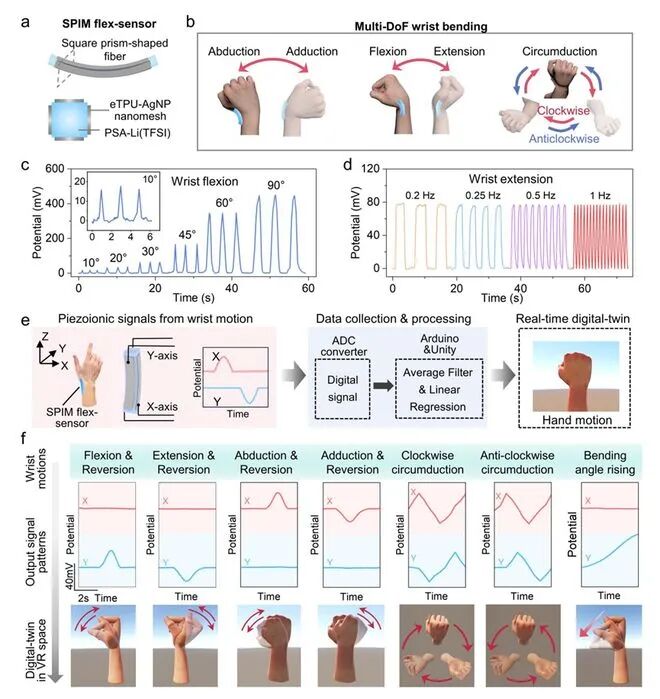
图4.自由姿势手部运动的数字孪生
基于多自由度响应能力,SPIM传感器实现了腕关节复杂运动的精准捕获与数字孪生重建,展示其运动追踪应用。传感器采用四棱柱状PSA-Li (TFSI)纤维搭配对称eTPU-AgNP纳米网格电极(图4a),贴合腕骨位置可同步监测多方向关节运动,涵盖腕关节屈曲/伸展、外展/内收、顺时针/逆时针环转等复杂运动模式(图4b)。频率响应测试中,40度伸展运动在0.2-1 Hz不同频率下,传感器输出信号幅值稳定,与驱动频率完全匹配,动态响应性能可靠(图4d)。数字孪生流程通过传感器采集信号,经ADC转换、滤波处理及线性回归分析后,在Unity引擎中实现手部运动的实时数字孪生,其中环转运动时,X-Y轴电极产生具有特定相位差的三角波信号,可精准还原运动轨迹,如视频1所示。
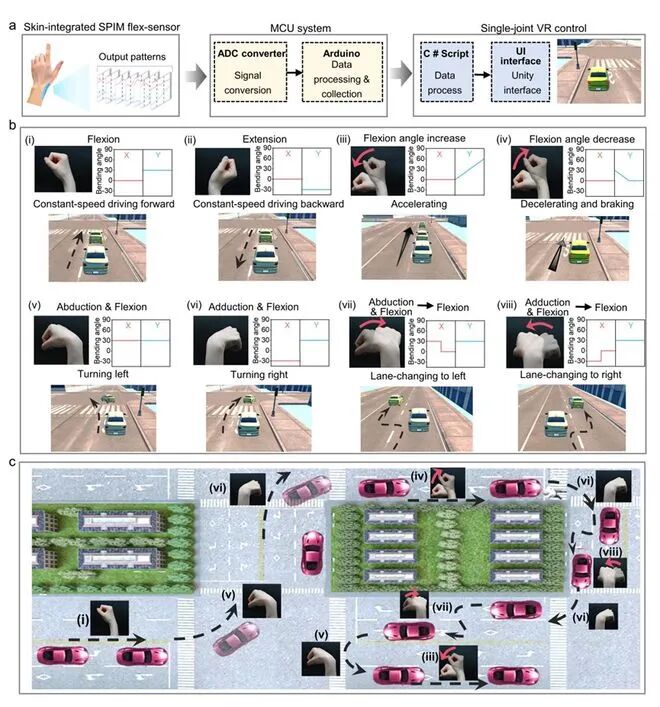
图5.单一紧凑传感器实现单关节虚拟现实控制
SPIM传感器可通过单关节动作实现VR场景的复杂控制,验证其作为人机交互接口的实用性与便捷性。皮肤集成的SPIM传感器将腕关节弯曲的方向与幅度转化为X、Y轴电势信号,经MCU系统处理后,映射为VR场景中的控制指令,实现物理动作到虚拟操作的直接转换(图5a)。图5b中描述了8种核心驾驶指令,对应腕关节的单一或组合动作。在VR交通场景演示中(图5c),佩戴传感器的操作者通过简单直观的腕关节运动,即可完成虚拟汽车的转向、加速、变道等复杂操作(如视频2所示),验证了传感器在沉浸式交互中的高效性与直观性,为元宇宙应用提供了轻量化、高精度的控制方案。
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55811浏览量
795437
发布评论请先 登录
ADIS16407十自由度惯性传感器的全面解析
ADIS16448:紧凑精密10自由度惯性传感器的技术剖析与应用指南
ADIS16445:高精度六自由度惯性传感器的卓越之选
ADIS16334:六自由度惯性传感器的卓越之选
KMX62:6自由度惯性传感器系统的全面解析
上海交通大学,中科院上海硅酸盐所:基于聚烯烃塑料的可持续碳气凝胶,用于高线性度双向应变传感

新加坡国立大学:研发用于水下传感应用的自激式线性神经形态柔性压力传感器

SCH16T-K01:高性能6自由度传感器的技术剖析与应用指南
首尔国立大学:研究生物启发型离子传感器:将自然机制转化为传感技术

中科院/重庆大学:仿生“电子皮肤”获突破!梯度模量设计让传感器实现“宽压域、高灵敏、抗漂移”

四川大学:协同离子-电子传输应变传感器实现宽工作范围内超高且可调灵敏度
中科院宁波材料所:双结构石墨烯/PDMS复合传感器,用于可穿戴设备应用
南京理工大学:研发柔性机械传感器表界面微结构-面向软体机器人
十字形多自由度超声电机接触分析模型研究
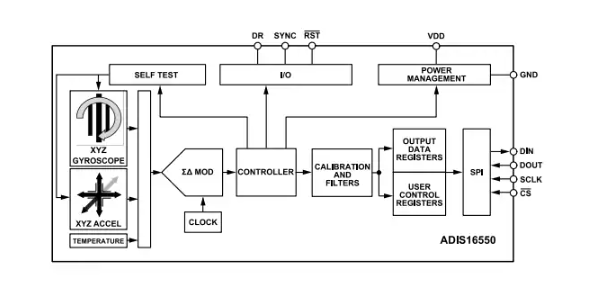
Analog Devices Inc. ADIS16550六自由度惯性传感器数据手册



评论