 自动驾驶大模型的训练数据有什么具体要求?
自动驾驶大模型的训练数据有什么具体要求?

[首发于智驾最前沿微信公众号]想训练出一个可以落地的自动驾驶大模型,不是简单地给其提供几张图片,几条规则就可以的,而是需要非常多的多样的、真实的驾驶数据,从而可以让大模型真正理解道路、交通参与者及环境的变化。

图片源自:网络
大模型能不能在真实交通环境中看懂路、判断状况、做出正确决定,关键在于它训练时看到的东西有没有覆盖足够多、够真实、够准确。若训练数据有缺陷、种类单一、环境单一、标注不准确、传感器不对齐,那么训练出的大模型在真实交通环境中面对复杂、极端、多变场景时,就容易失灵、判断失误。

多传感器+多模态,感知数据来源要丰富
对于自动驾驶来说,仅依靠单一摄像头图像无法稳定、全面地判断路况。视觉图像擅长提供颜色、纹理、标志、灯光信号等语义信息,但在光线不足、夜间、强逆光、遮挡以及雨雪雾等复杂环境下容易失效。因此,使用如激光雷达(LiDAR)、毫米波雷达(Radar),以及用于获取定位、姿态和速度信息的IMU/GNSS/GPS等传感器补全这类视觉盲区是非常有效的手段。通过将这些传感器的数据相融合,能实现多模态感知,从而让自动驾驶汽车更可靠地理解周围环境。
对于能够实现“端到端”感知、决策甚至控制的自动驾驶模型而言,多模态数据是必不可少的。这类模型需要像人一样,综合多种“感官”信息来理解环境,不仅会用摄像头“看见”物体和标识,也会通过激光雷达等传感器“测量”距离、深度与速度。当遇到恶劣天气或视觉受限的情况时,多种数据可以相互补充,从而维持系统感知的稳定性。

图片源自:网络
因此,训练这类模型的数据必须包含来自不同传感器的信息,其中不仅要有摄像头图像信息,还应包括激光雷达点云、毫米波雷达数据、定位及惯性测量单元(IMU)信息等。这些不同来源的数据必须在时间上严格同步、在空间上精确对齐,经过校准后才能有效用于模型训练,确保多模态融合的效果。

环境与场景需要更多样
现实中的道路环境复杂多变,从城市街道、高速公路到乡村小道、桥梁隧道,再到不同国家和地区的交通设施与驾驶习惯,均各有差异。同时,天气和光照条件也时刻变化,晴天、阴天、雨雪、雾天、夜晚、逆光等场景都可能出现。
交通参与者更是种类繁多,其中不仅包括汽车、卡车、摩托车、自行车和行人,还可能涉及宠物、动物、临时路障、施工标志等不规则障碍物,更有一些人为导致的异常障碍物。
如果训练模型的数据只包含白天、天气良好、道路规整、交通有序的理想场景,那么模型学到的驾驶经验将非常有限。一旦遇到复杂、混乱或不常见的路况,自动驾驶系统就容易出现误判甚至失效。

图片源自:网络
因此,想训练好自动驾驶大模型,必须有高质量的训练数据,其必须覆盖广泛、多样的真实场景,且尽可能还原现实中可能遇到的各种情况。这也是让自动驾驶模型具备泛化能力、安全适应不同环境的基础。

标注与对齐—数据必须干净、准确、有意义
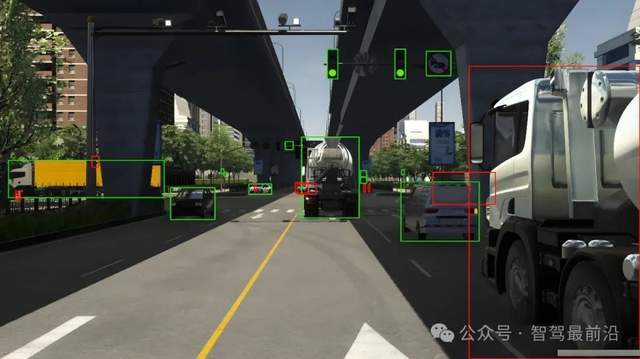
再好的传感器、多模态数据与丰富的复杂场景,如果数据本身没有被准确标注、严格同步与精确对齐,也可能达不到训练大模型的要求。自动驾驶训练数据不仅要求有图像和点云,更关键的是要让大模型知道图像和点云中每个物体是什么、位于何处、属于哪一类,以及可能的运动状态。
为了让模型学会识别这是车道线、那是行人、这是障碍物、那是远处的车辆、这是从左侧走来的行人、这是交通信号灯、那是交通标志、这是路边的立柱等各类元素,训练数据必须对这些场景进行精确而细致的标注。标注内容包括物体的3D边界框、类别(如车辆、行人、自行车、交通标志、信号灯、障碍物等),有时还需涵盖跨帧的运动轨迹、被遮挡的状态、以及运动方向与速度(如果预测任务需要)等信息。
图片源自:网络
由于数据来自多模态传感器(如摄像头、激光雷达、毫米波雷达等),不同传感器之间必须进行校准并在时间上同步,以确保同一时刻的图像帧、激光雷达点云以及其他传感器数据能够完全对应。否则,模型在融合多模态信息时,会因时间偏差或空间未对齐而产生误差,进而影响感知准确性,甚至危及行车安全。
在进行标注时,一定要注意标注的质量,错误标注、漏标物体、类别混淆、边界框的位置尺寸或角度标注不准确、前后不一致或跨帧不连贯等问题,都可能导致模型学到错误的规律,以至于在实际部署时做出误判。

数据需适应真实驾驶的动态、远、长特性
自动驾驶的感知与决策需要适应真实交通环境中动态、远距离、长时间连续的特性。交通环境并不是静止的,而是随时间连续变化的,物体可能处于运动状态(如行人、车辆),会加速、减速、转向,也可能被遮挡、进入或离开视野。一个完善的自动驾驶模型不仅要能识别当前瞬间的画面,还需要理解随时间变化的动态过程,预测物体未来的状态与轨迹,并能应对遮挡、规划路径与决策。
因此,对于自动驾驶大模型训练的数据仅依赖静态图像或单帧点云的标注数据依旧不够。训练数据最好包含多帧连续的时序信息,使模型能够学习运动规律、轨迹预测、速度与加速度估计、遮挡与重现现象,以及物体之间的交互行为。当前很多多模态数据集与研究都已将时序动态建模纳入考量。

图片源自:网络
此外,针对高速场景下的远距离感知(如远处车辆或障碍物),以及复杂天气、低光照、遮挡等边缘情况,训练数据也需要覆盖足够远、足够复杂、足够不完美的场景。只有这样,模型在真实世界中面对各种环境时才能保持稳定可靠。
因此,远距离感知、夜间、雨天、混合光照、遮挡与复杂背景等情形,都应在训练数据中得到充分体现。目前,已有不少公开数据集致力于融合激光雷达、相机与毫米波雷达数据,实现360度覆盖,并包含夜间、雨天、城市、高速、郊区等多种复合场景,以提升模型的适应性与稳健性。

最后的话
要训练出能在真实路上使用的大模型,数据必须是“多、准、广、连”。也就是说要有摄像头、LiDAR、雷达、IMU等多种传感器的同步数据,覆盖白天/夜晚、多种天气和不同道路场景,包含连续帧与大量边缘情况,标注要精确到3D边框、跟踪id、速度/方向和遮挡信息,并且做好隐私合规。只有这种高质量、多模态、时序化且标注严谨的数据,模型才能把海量样本变成可靠的感知、预测与决策能力,从而让自动驾驶加速落地。
审核编辑 黄宇
-
自动驾驶
+关注
关注
795文章
15056浏览量
181991 -
大模型
+关注
关注
2文章
3863浏览量
5295
发布评论请先 登录
3DGS+合成数据,真能让自动驾驶告别“长尾场景焦虑”吗?

理想汽车发布下一代自动驾驶基础模型MindVLA-o1

大模型时代自动驾驶标注有什么特殊要求?

如何构建适合自动驾驶的世界模型?

自动驾驶中常提的模仿学习是什么?
自动驾驶大模型中常提的泛化能力是指啥?

如何训练好自动驾驶端到端模型?

VLA能解决自动驾驶中的哪些问题?

不同等级的自动驾驶技术要求上有何不同?
自动驾驶仿真测试有什么具体要求?

自动驾驶数据标注主要是标注什么?
什么是自动驾驶数据标注?如何好做数据标注?

为什么自动驾驶端到端大模型有黑盒特性?

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

自动驾驶中常提的世界模型是个啥?




评论