 从经典CAN到CAN XL:自动驾驶高带宽数据采集的新答案
从经典CAN到CAN XL:自动驾驶高带宽数据采集的新答案

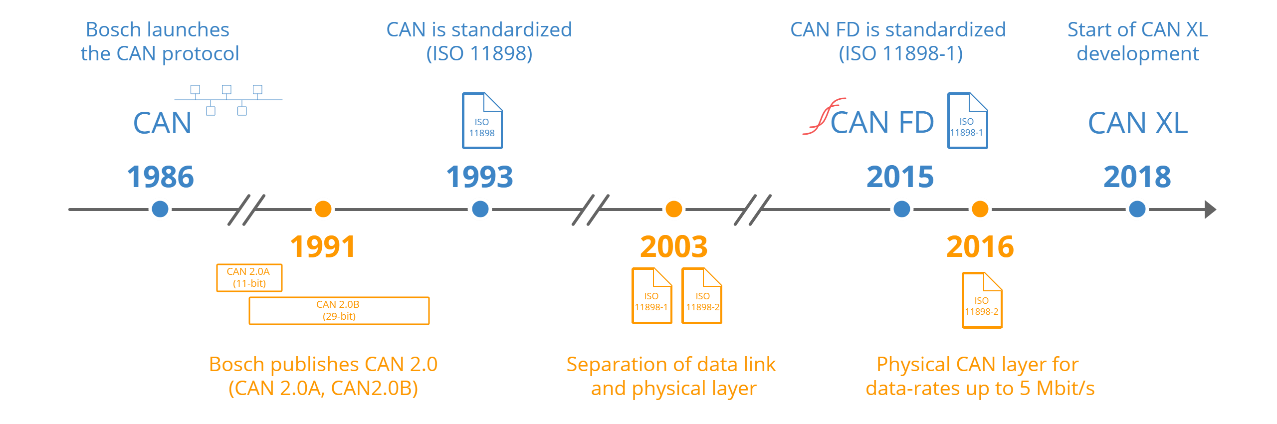
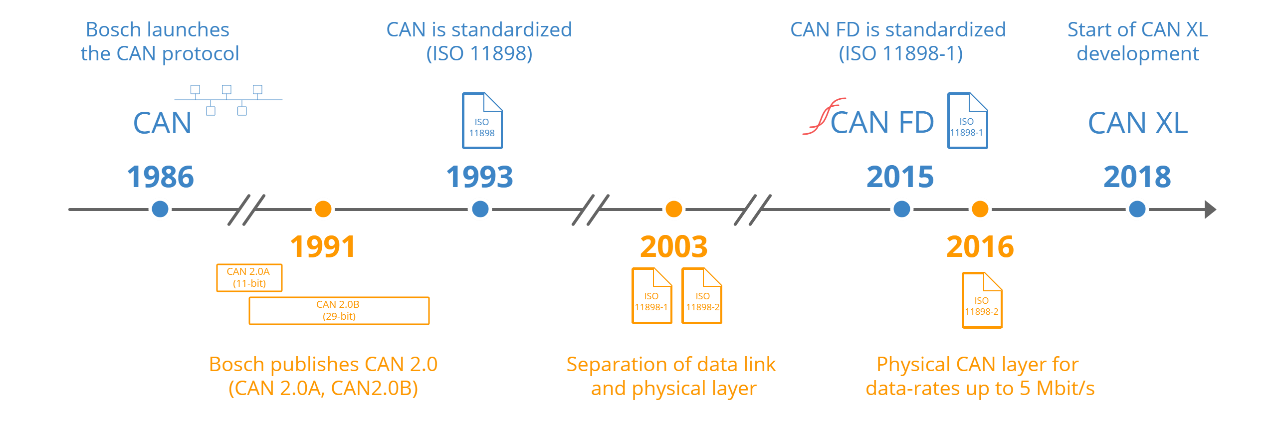
当激光雷达、800 万像素摄像头和毫米波雷达同时“开口说话”,每帧 3 MB 的点云图像在 10 ms 内就要被域控制器收齐——经典 CAN 的 1 Mbps 显然力不从心,CAN FD 的 64 字节帧也略显拮据。2024 年正式发布、现已批量供货的第三代总线 CAN XL,用 20 Mbps 峰值速率与 2048 字节单帧负载,为 L3 以上自动驾驶数据采集提供了第三条路。本文结合最新路测数据与 OTA 升级案例,拆解 CAN XL 与 CAN FD、经典 CAN 的核心差异,并给出可落地的选型思路。
一、为什么“更大帧”比“更高速”更关键
很多工程师第一反应是“把速率提上去就行”,但车载异构网络里总线长度、支线拓扑与 EMC 法规限制了波特率上限。CAN XL 沿用仲裁段最高 1 Mbps、数据段最高 20 Mbps 的“双速率”机制。相比CAN FD,既保留原有线束,又把单帧数据扩大 32 倍,相当于用“大货车”替代“小皮卡”——同样 3 MB 视频,CAN FD 需拆分 480 帧、间隔 5 ms 重传,总耗时 4.5 s;CAN XL 仅 24 帧、1.9 s 完成,抖动从 30 μs 降到 17 μs,CPU 负载下降 40 %。对于 10 Hz 的实时融合算法,这意味着缓存更小、延迟更确定。
二、协议层三大革新:SDT、VCID 与双 CRC
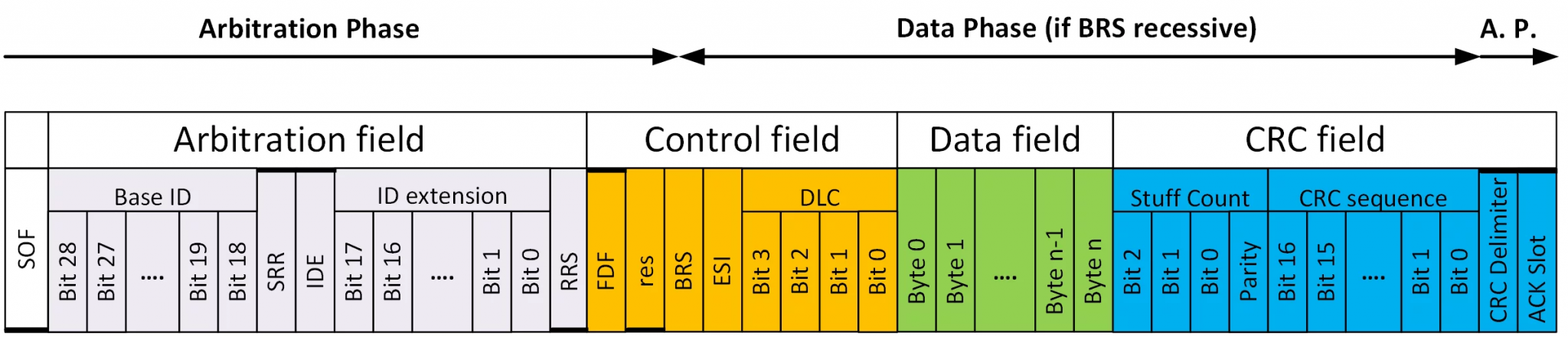
1. 服务数据类型 SDT:8 位 SDT 可封装以太网帧(SDT=0x04/0x05 对应 IEEE 802.3 隧道),支持 UDP、SOME/IP 与 TCP/IP 协议栈调用,域控无需额外交换机即可实现跨协议数据转发,雷达对象列表进 ROS2 节点具备可行性。 2. 虚拟网络 ID VCID:8 位 VCID 可在单物理总线上划分最多 256 路逻辑通道,支持按通道做 QoS 与故障域隔离,适配激光雷达(高优先级)、摄像头(大带宽)的差异化需求。 3. 13 bit PCRC + 32 bit FCRC 级联校验:3 位 PCRC 校验仲裁段与控制段,32 位 FCRC 校验数据段,级联设计实现汉明距离 = 6,可检测 5 位随机错误,误帧率较 CAN FD 显著降低,满足 ISO 26262 ASIL‑B 通信链路覆盖度要求。
三、与 CAN FD、经典 CAN 的硬指标对照
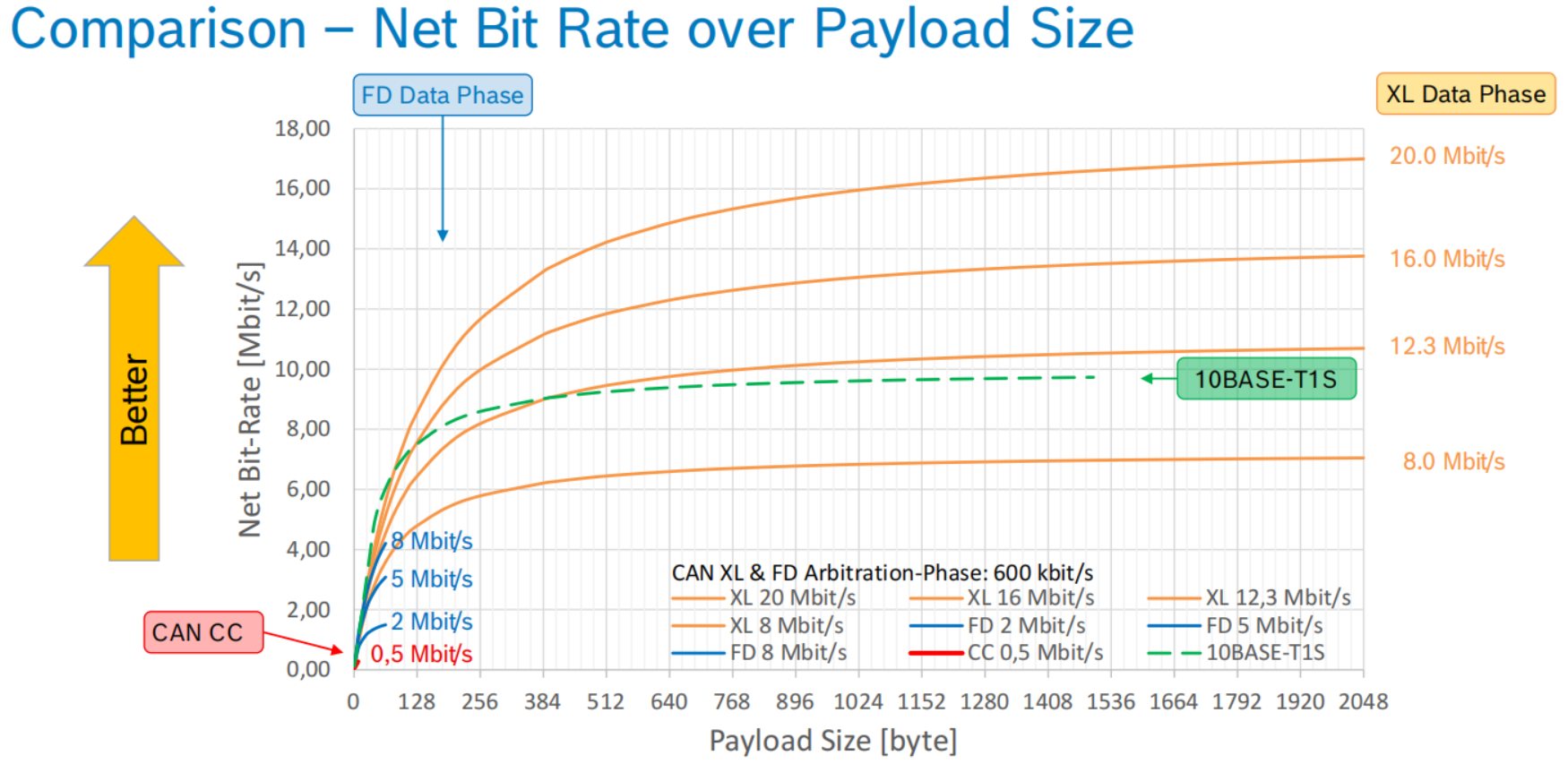
速率:经典 CAN 1 Mbps,CAN FD 8 Mbps(SIC),CAN XL 20 Mbps; 单帧数据:8 Bytes → 64 Bytes → 2048 Bytes; 仲裁 ID:11 bit → 11 bit → 11 bit(向下兼容); 速率切换:无 → 可选 → 强制; 远程帧:支持 → 不支持 → 不支持; 拓扑兼容性:三者可在同一总线共存,只需统一 SIC 或 SIC-XL 收发器,老节点无需硬件改动。
四、自动驾驶数据采集落地案例
某 Tier-1 前向感知域控原方案:4 路 100 万像素摄像头 + 1 路 16 线激光雷达,采用 100BASE-T1 以太网,需 5 通道 PHY 交换机,线束成本 380 元/车,且交换机休眠功耗 120 mA。
升级至 CAN XL 后:摄像头模组保留以太网接口,但通过板载“以太网-CAN XL 桥接 MCU”把 H.264 码流转成 CAN XL 帧;激光雷达原生 CAN XL 输出。整线束改为 4 根双绞线(电源+CAN XL),取消交换机,休眠电流降到 15 mA,整车线束减重 0.8 kg,BOM 成本下降 42 %,OTA 升级 3 MB 固包由 4.5 s 缩短至 1.9 s,用户无感完成。
五、选型建议:什么时候上 CAN XL
1. 传感器单口数据量 0.5-3 MB/s,且对实时性 < 10 ms;
2. 平台需向下兼容大量 legacy CAN 节点,不想推倒重来;
3. 整车电源管理严苛,要求总线自己唤醒、休眠;
4. 预算无法承担 100BASE-T1 交换机 + PHY 的高成本。
若只是 500 Kbps 车身控制,经典 CAN 足够;若仅 2 Mbps 雷达目标帧,CAN FD 即可;一旦迈进 800 万像素或 3 MB 点云,CAN XL 成为目前唯一能兼顾带宽、实时与成本的量产方案。
对于希望体验或部署CAN XL的用户,目前市场上已有成熟的开发套件和工具,能够帮助工程师快速上手。
虹科PCAN-XL套件
适用场景:CAN XL技术验证、车载通信开发、工业自动化测试

核心组件:
PCAN-USB XL接口:支持CAN XL、CAN FD和经典CAN,兼容USB 2.0/3.0,提供500V电气隔离,确保设备安全。
PCAN-Explorer 7(抢先体验版):支持CAN XL协议解析、Python脚本自动化、J1939 FD协议,并提供高精度时间戳(1µs)和灵活的报文过滤。
双节点支持:套件可选配1个或2个PCAN-USB XL接口,即使没有CAN XL对接设备,也能进行基础通信测试。
优势:
✅ 即插即用,适合快速验证CAN XL通信
✅ 支持高达20Mbit/s的数据传输(FAST-Mode)
✅ 兼容CAN FD和经典CAN,便于过渡和兼容性测试
六、小结
CAN XL 不是“更快的 CAN FD”,而是把“以太网级大帧”搬进熟悉的两线 CAN 生态。20 Mbps 峰值、2048 字节单帧、双 CRC 校验、原生 TCP/IP 映射,让它在 L3 以上自动驾驶数据采集场景首次实现“高带宽-低延迟-低成本”的不可能三角。随着 2025 年 ISO 11898-4 正式落地,主流 MCU 已集成 CAN XL 控制器,Tier-1 的评估板也已批量供货,下一步要做的,就是把这条“更宽的 CAN”规划进下一代 E/E 架构。
审核编辑 黄宇
-
CAN
+关注
关注
59文章
3107浏览量
473830 -
数据采集
+关注
关注
42文章
8405浏览量
121386 -
自动驾驶
+关注
关注
795文章
15056浏览量
181991
发布评论请先 登录

基于CANoe的CAN XL测试实践

为什么很多主机厂都在开始讨论和预演CAN XL?

自动驾驶端到端为什么会出现黑盒现象?

高校自动驾驶研究新基建:“实测 - 仿真” 一体化数据采集与验证平台

CAN XL 技术解析:从协议演进到自动驾驶数据采集应用实践
自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案

自动驾驶数据采集时间同步指南:方法、挑战、场景与康谋解决方案
直播回顾 | CAN XL新标准落地难?从协议解析到实践应用,虹科技术专家带您全面探索CAN XL的技术突破与落地

端到端自动驾驶相较传统自动驾驶到底有何提升?

CAN XL通信技术在车载毫米波雷达中的应用(2)

条码信号“搭子”来了:CAN转EtherCAT扫码连动器,靠谱!
为什么自动驾驶端到端大模型有黑盒特性?

一文读懂CAN XL协议



评论