 新型“机器蟑螂”可行走、下水和在水面上游泳
新型“机器蟑螂”可行走、下水和在水面上游泳

美国哈佛大学的研究人员基于蟑螂的水下生存和移动能力,研制出新型蟑螂仿生机器人。该机器人既能在陆地上行走,又能在水面上游泳,必要时还可在水下行走将来有望应用于水下探索。
目前,蟑螂机器人还处于实验室阶段,其重量仅有1.65g,四肢上分别设置有一个多功能脚垫,利用多功能脚垫,其可依靠液体表面张力在水面上游泳,甚至还能通过施加电压冲破水面,潜入水底。同时,该机器人可携带1.44g的有效载荷在水上浮动,以最高 10 赫兹的频率,在水面上进行快速摆动,还能追上预先放在水上的纸船。此外,该机器人整个机身覆盖特殊防水涂层,可避免在水下发生电路短路现象。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
仿生机器人
+关注
关注
1文章
76浏览量
16241
原文标题:哈佛大学研发新型蟑螂仿生机器人
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
纤纳光电钙钛矿叠层组件发电表现优于晶硅
一年前,全球首个百千瓦级钙钛矿/晶硅叠层电站在山东枣庄峄城的一片水面上并网发电。如今,这座500kW电站的实际运行数据显示,钙钛矿叠层组件发电增益比晶硅高出约10%。
2026年中国十大机器视觉公司的决胜逻辑:全栈能力与场景深耕
凌云光是以机器视觉与光纤光学为主营业务的科创板上市公司,公司掌握“光机电算软”全栈核心技术,在产业链中扮演着高端视觉系统提供商的角色,能够有效衔接上游核心器件与下游复杂的工业场景。特别是在新型显示
发表于 05-15 09:16
基于 BLDC/PWM 的扫地机器人行走电机驱动板电路原理与故障保护
扫地机器人行走系统的核心性能取决于无刷直流电机(BLDC)与 PWM(脉宽调制)驱动技术的协同优化,而驱动板作为 “动力中枢”,需同时实现精准调速、差速转向控制与全方位故障防护。本文以两轮差速扫地机器
机器视觉镜头如何发现深海沉船
。 使用机器视觉镜头进行深水成像在水面下数百英尺处拍摄视频需要的不仅仅是一台标准摄像机。在这个深度,没有自然光。能见度迅速下降。水中的微粒会将人造光反射回摄像机镜头,就像车灯光束中的雪花一样
发表于 02-11 16:03
请问JH7110 上游到主线 Linux 是否停止?
我正在查看页面 (JH7110 上游状态 |房车空间)的上游进度状态,它似乎在很大程度上停滞/减慢了。
从内核版本 6.3 上游到 6.6/6.7 的组件出现了一连串。
自内核 6.7 以来,只有一
发表于 02-04 06:51
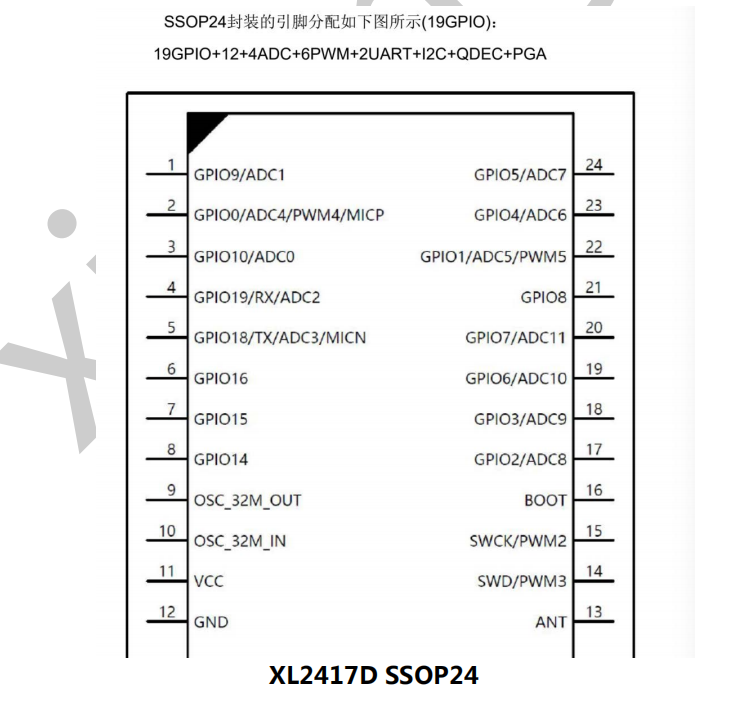
2.4G钓鱼打窝船解决方案,2.4G SOC芯片XL2417D,通信距离可达300M
2.4G钓鱼打窝船是一种高科技钓鱼辅助设备,主要用于将鱼饵精准投放至湖泊深处进行打窝,主要通过2.4G双向无线通信系统实现遥控操作,通过遥控操作,可以精准的在水面上定位并释放鱼饵,大大提高了打窝的准确性和效率。钓鱼打窝船的打窝距离和精度远超于手抛打窝,在较大水域中用处非常大。
凯米斯科技:智能监测赋能唐山地下水治理标杆
随着地下水生态保护与精细化管理需求的持续升级,凯米斯科技依托其在环境监测领域的技术积淀与场景化落地能力,打造了一套适配复杂水文地质条件的地下水监测解决方案,在实际项目中实现了监测、管理与治理的高效

尾矿区地下水在线监测管理系统方案
在矿产资源开发过程中,尾矿区的管理往往面对着一系列难题,尤其是地下水污染与过度开采问题。尾矿中的有害物质可能通过渗流作用污染地下水,同时非法盗采地下水现象频发,导致地下水位下降、水质恶
地下水水位监测物联网系统方案
随着全球城市化进程的加速推进以及农业灌溉需求的持续增长,地下水作为重要的淡水资源,其开采量日益增加。然而,不合理的开采方式导致地下水位持续下降,进而引发了地面沉降、水源枯竭、海水倒灌等一系列环境
阵列式雷达流量监测站-案例分享
(水位)和水面流速,进而计算出流量。一、工作原理阵列雷达技术:采用多天线阵列,可同时发射多个雷达波束,覆盖更广的水面区域。非接触式测量:安装在水面上方(如桥梁、支架)

材质识别MEMS超声波传感器赋能双足机器人自适应行走
材质识别MEMS超声波传感器通过声学特性分析,为双足机器人提供了独特的环境感知维度。其在步态适应性、防滑控制及能耗优化方面的作用,已成为复杂环境下稳健行走的关键使能技术。随着MEMS工艺与算法融合的深入,双足机器人的环境适应性将

全球首次!人形机器人 24 小时自主行走
电子发烧友网综合报道 近日,智元机器人宣布,该公司旗下的人形机器人 “远征 A2” 完成了一场全球首次的 24 小时高温环境下全自主行走挑战。 挑战于 8 月 17 日 8:20 开始,持续至
发表于 08-25 08:29
•2252次阅读
成都华微一行走进成都人形机器人创新中心
近日,成都华微电子科技股份有限公司(以下简称“成都华微”)董事会秘书李春妍、SoC研发中心主任胡参、市场部部长车红瑞一行走进成都人形机器人创新中心,双方围绕智能机器人核心技术展开深入交流。
智能割草机器人行走轮无感FOC解决方案
,割草机器人行业正处在爆发式增长的关键时期,它凭借着其高效率、减少劳动力、安全的特点,在欧美等庭院文化发达的国家盛行。 智能割草机器人中的电机驱动系统主要由行走电机驱动和割草电机驱动两部分组成,

树莓派驱动的智能假肢:用眼感知,用心行走!
的研究人员发布了一篇论文,阐述了如何借助计算机视觉技术——结合部分由树莓派驱动的预测机制——助力配备下肢机器人假肢的用户在不平整路面上更自然、更安全地行走。论文作者之




评论