 协作机器人TM25S:内置视觉系统实现精准作业
协作机器人TM25S:内置视觉系统实现精准作业

TM25S协作机器人配宽视角、高分辨率的“500万像素相机”,内置视觉系统,专为工业级图案识别、物体定位和特征识别而设计。如果集成外部相机或照明设备,用户可设置视觉任务以立即部署,无需执行复杂步骤。
内置视觉系统具有四大功能:识别、增强、查找、测量。
识别功能可以对条形码/QR码/DataMatrix码等二维码进行读取、颜色识别、OCR等功能,可用于检测、分拣、定位等多种工序。

增强功能可以增强图像特征,提高特殊应用环境中识别项目的成功率。

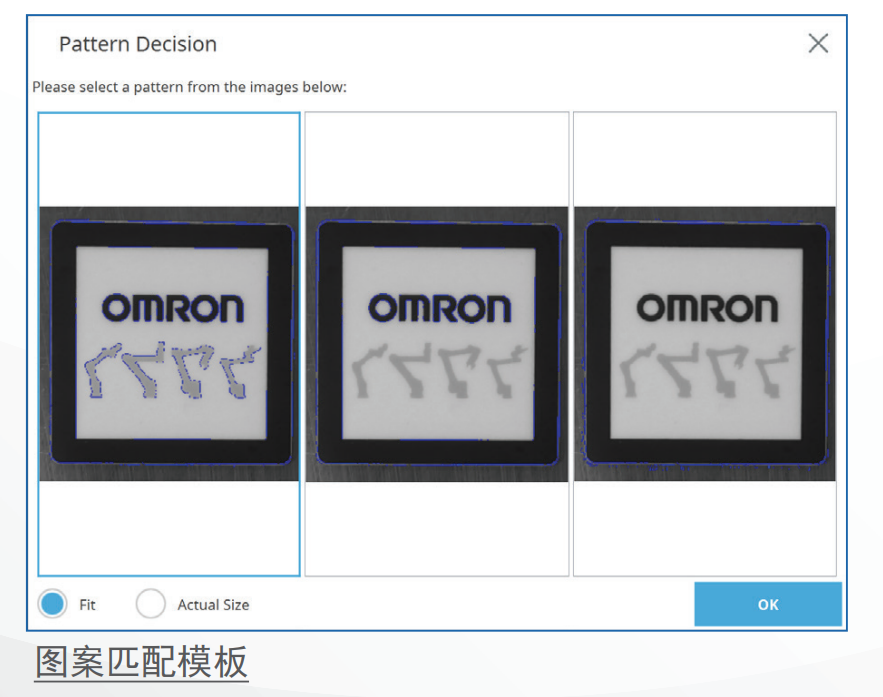
查找功能可以通过特征量进行图像匹配,从而定位对象。

测量模块可用于计算对象的数量、图像的几何位置和角度。

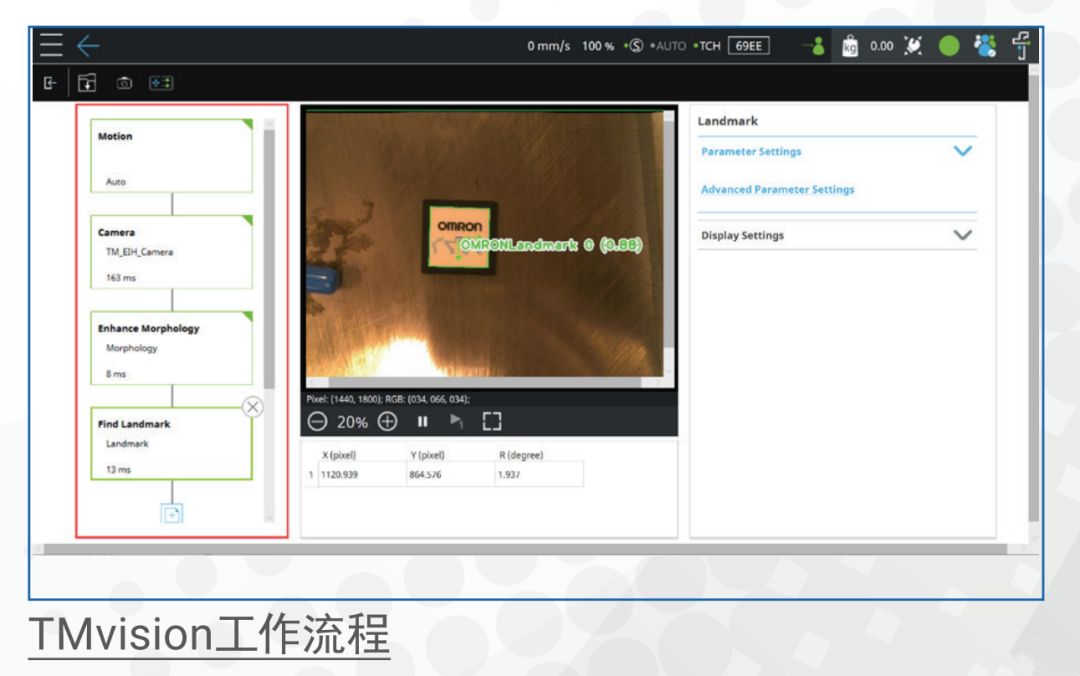
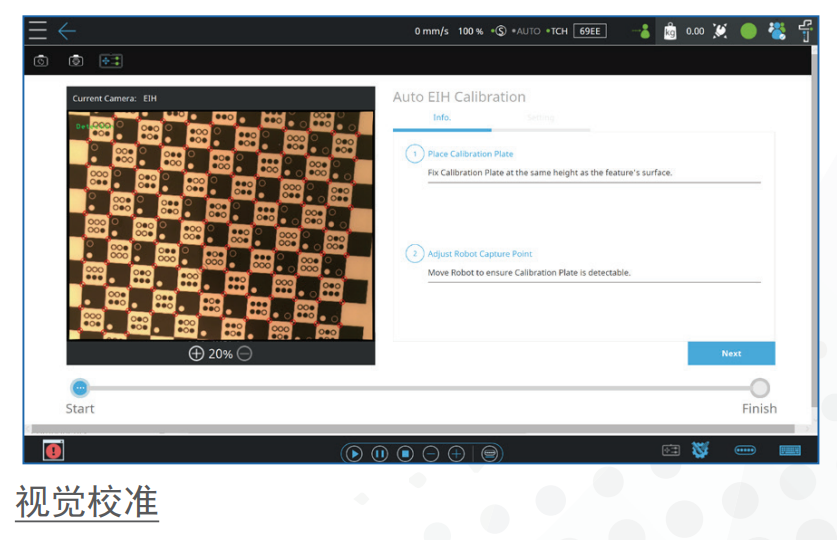
此外,TM25S还内置了相机设定应用TMvision。它能提供的多种辅助和集成工具,可以对协作机器人的功能进行设定和编程,可实现图像匹配、视觉校准、伺服质检和测量操作。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
视觉系统
+关注
关注
3文章
367浏览量
31627 -
协作机器人
+关注
关注
2文章
535浏览量
31277
原文标题:协作机器人TM25S丨内置视觉系统,实现精准作业
文章出处:【微信号:欧姆龙工业自动化,微信公众号:欧姆龙工业自动化】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
变焦、高速、高清:索尼FCB-ER9500机芯如何重塑机器人视觉
在现代化工业车间里,一台搭载了新型视觉系统的机器人正精准地检测着精密零部件的微小瑕疵,这是工业自动化领域正在发生的变革场景。 工业机器人正逐渐成为智能制造的核心力量,而
视觉协同驱动智能作业:SDI编码板CM2001S与CM8210S-B重塑机器人应用新生态
在工业4.0与智能制造的浪潮中,视觉系统已成为机器人的"智慧双眼"与"神经中枢",直接决定其作业精度、响应速度与环境适应性。SDI编码板CM2001S与摄像模组CM8210
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 多路MIPI-CSI接口:原生支持接入多个摄像头,为构建多目视觉系统打下坚实基础,满足机器人全方位感知需求。
RK3576在机器人领域的核心应用场景特种作业与工程
发表于 10-29 16:41
富唯智能复合机器人力控技术:重新定义精准自动化
在工业自动化和智能医疗快速发展的今天,富唯智能凭借先进的复合机器人力控技术,推出了新一代复合机器人解决方案。该方案深度融合协作机器人、自主移动机器人
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
。
同时,磁传感器还是多传感器融合中的 “稳定锚点”。在机器人运动系统的融合定位中,它常作为核心基准。以 “足球机器人” 项目为例,当视觉传感器因强光出现噪点、超声波传感器受声波反
发表于 08-26 10:02
智慧档案库房|经世智能复合机器人档案存取与转运解决方案
经世智能复合机器人在智慧档案库房行业主要应用于档案自动存取与转运、高密度存储环境下精准作业等环节,通过“AGV移动底盘+协作机械臂+视觉系统

慧通测控的协作机器人有哪些测试项目?
在智能制造与自动化浪潮席卷全球的当下,协作机器人(Cobots)以其能够与人类安全、高效协同作业的特性,成为工业、医疗、物流等领域的 “新宠”。然而,要确保协作

工业机器人协作场景中的聚徽电容触控交互方案:安全急停与精准操控的双重保障
随着工业自动化的深入发展,工业机器人协作场景日益普遍。在人与机器人协同作业的过程中,安全与精准是
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
相机标定是视觉系统的基石,直接影响后续图像处理的精度。书中详细介绍了单目和双目相机的标定流程,包括标定板的使用、参数优化以及标定文件的应用。
实际应用中,标定误差可能导致机器人定位偏差,因此标定过程
发表于 05-03 19:41
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】+两本互为支持的书
最近在阅读《具身智能机器人系统》这本书的同时,还读了 《计算机视觉之PyTorch数字图像处理》一书,这两本书完全可以视为是互为依托的姊妹篇。《计算机视觉之PyTorch数字图像处理》
发表于 01-01 15:50
新型复眼结构有望革新机器人视觉系统
的灵敏度较现有市售产品高出两倍以上。这一突破有望革新机器人视觉系统、增强机器人的导航、感知和决策能力,并为人机协作开拓了更广泛的商业应用和未来发展空间。 研究团队(香港科技大学





 工商网监
工商网监
评论