 使用激光跟踪仪提升码垛机器人精度
使用激光跟踪仪提升码垛机器人精度

1.背景
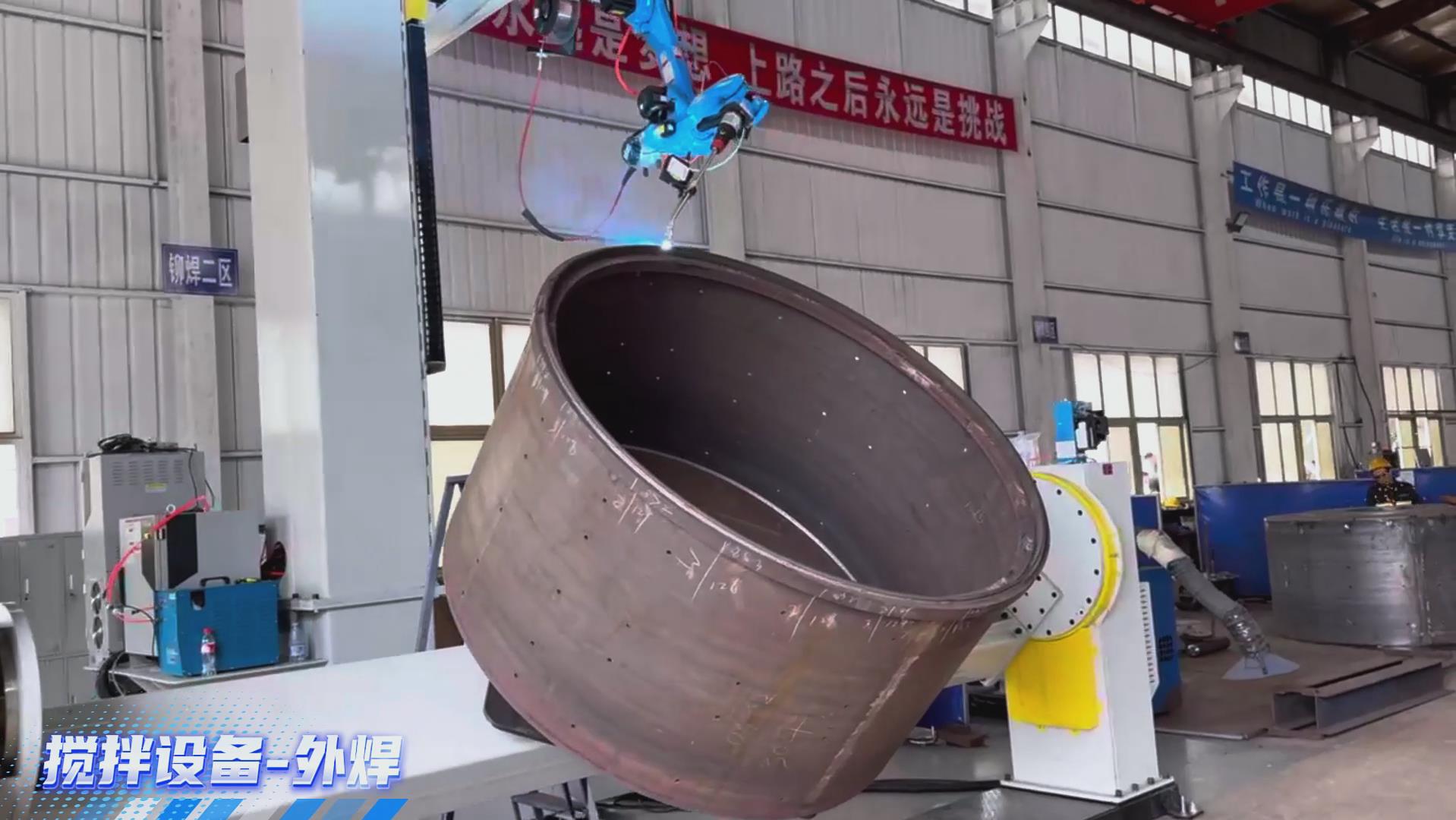
码垛机器人是一种用于工业自动化的机器人,专门设计用来将物品按照一定的顺序和结构堆叠起来,通常用于仓库、物流中心和生产线上,它们可以自动执行重复的、高强度的搬运和堆垛任务。
 图1 码垛机器人
图1 码垛机器人传统调整码垛机器人的方法,通常在组装后先按机械刻度粗调每个关节零位,然后机器人分别沿X/Y方向,走固定长度的距离,用尺子或其它工具测量实际距离,计算偏差,根据偏差再进行微调零位,但这种调整方式有很大的局限性,对机器人的绝对定位精度提升有限,无法满足工业发展需要。
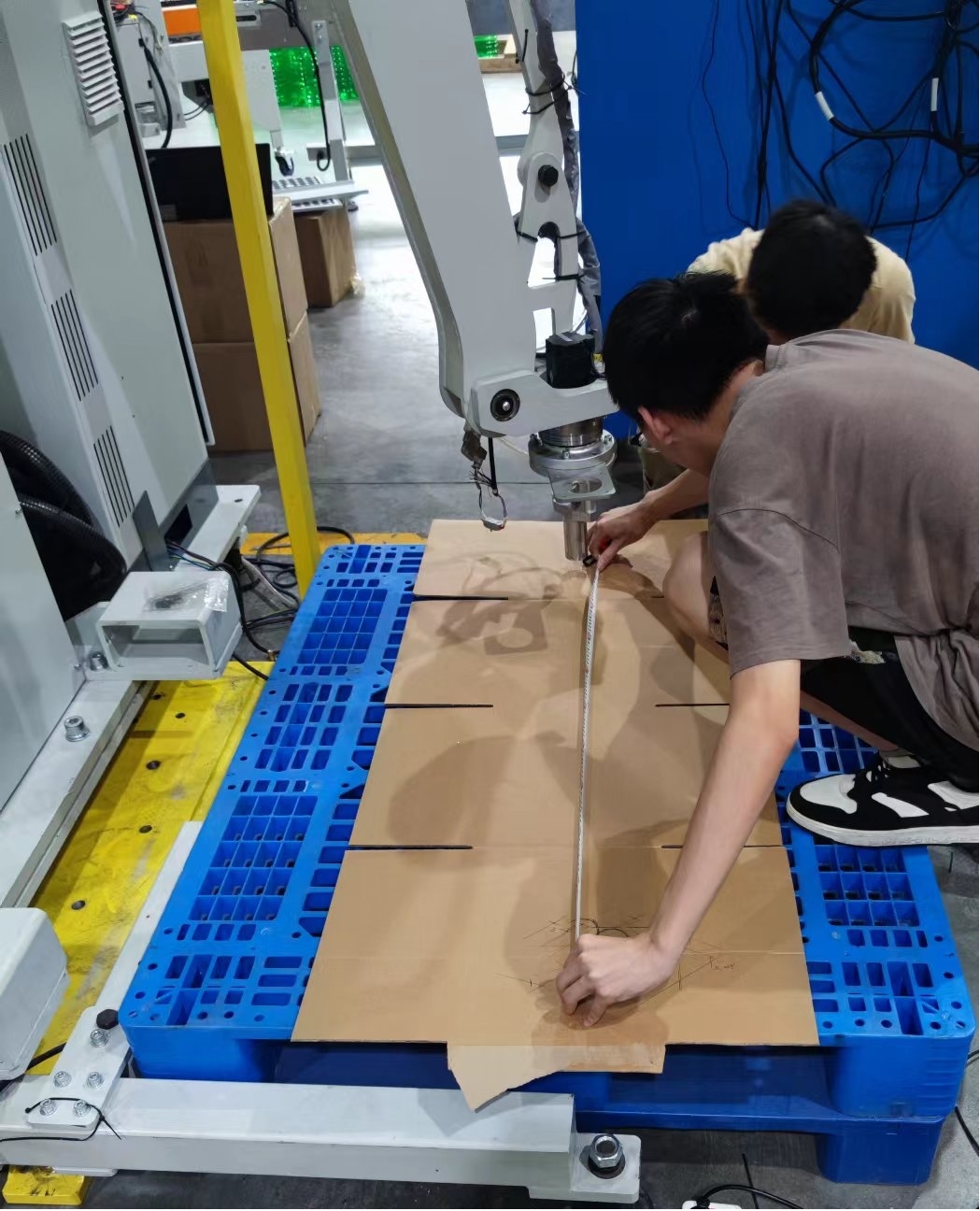 图2 传统方式测量机器人X向运动偏差
图2 传统方式测量机器人X向运动偏差2.解决方案
针对工业机器人行业提升绝对精度的需求,深入行业调研实测,RobotMaster软件系统专门应对工业机器人校准及性能需求,搭配GTS系列激光跟踪仪, 搭建成一套完备的工业机器人校准及检测方案。
其中GTS激光跟踪仪搭配iTracker六维姿态传感器(图3),可实现对目标位置和姿态的动态跟踪及高精度测量,可同时实现对工业机器人位置精度和姿态精度的监控和测量,完美契合工业机器人性能指标的测量需求。
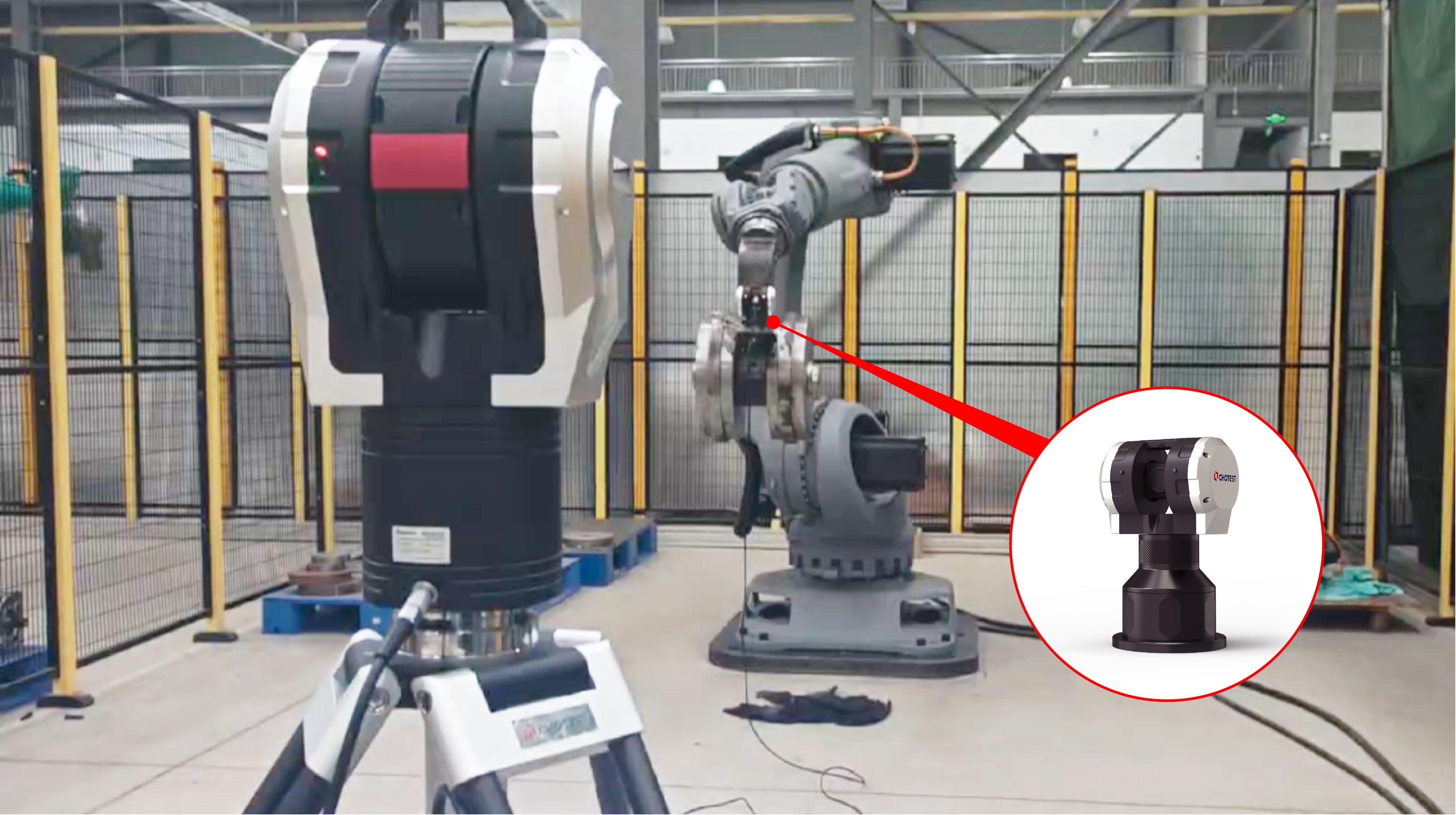 图3 使用六维姿态传感器测量机器人
图3 使用六维姿态传感器测量机器人激光跟踪仪校准机器人的原理:通过GTS激光跟踪仪,可以精确测量机器人末端在一系列预定义关节角度下的实际位姿,RobotMaster软件将测量数据与内部通过DH模型转换得到的理论值进行计算。根据计算所得偏差,通过软件的算法调整DH模型,使得理论位置与测量位置之间的差异最小化,将修正后的参数补偿进机器人,从而提高其精度。
3.校准流程
3.1 模型创建
在RobotMaster软件中选择码垛机器人,建立机器人的理论DH模型(图4),如果没有DH模型,也可用常规模式创建杆长模型。
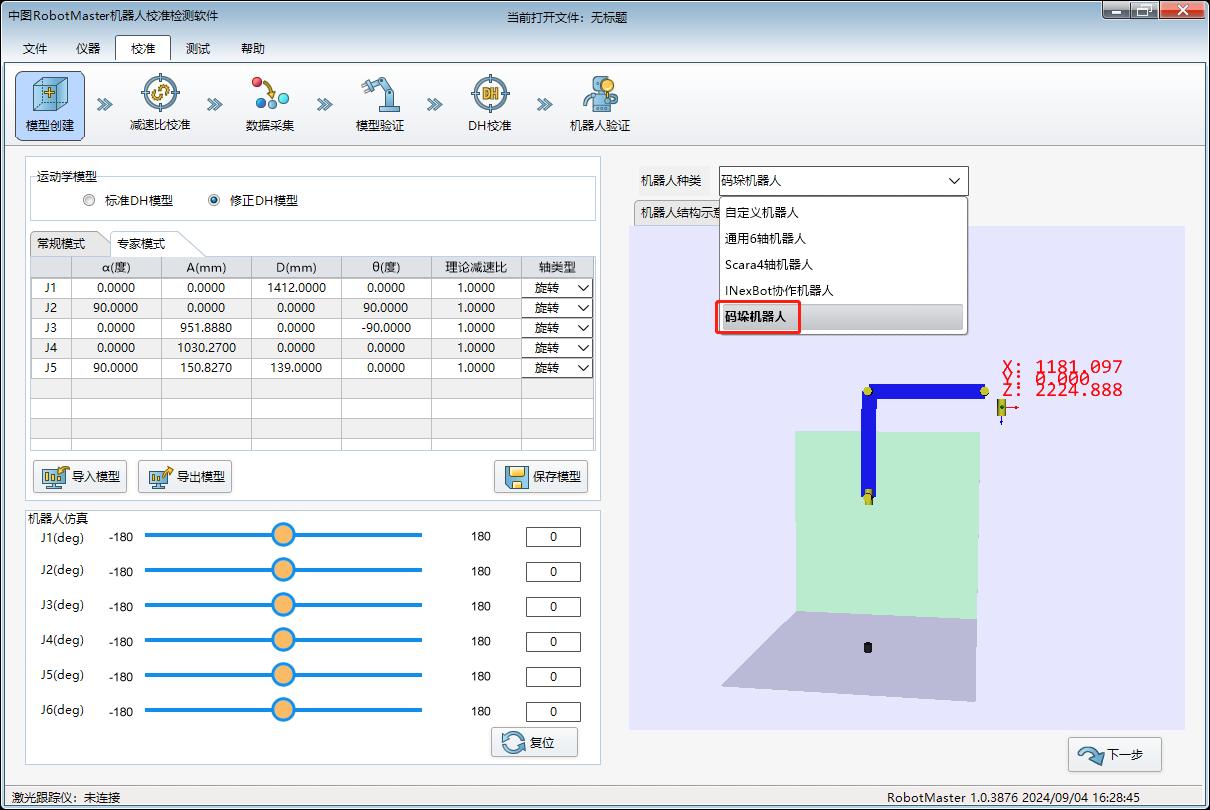 图4 码垛机器人DH模型
图4 码垛机器人DH模型3.2 数据采集
(1)通过跟踪仪采集码垛机器人不同位置的50个点位。
 图5 跟踪仪测量进行数据采集
图5 跟踪仪测量进行数据采集(2)数据采集完毕后,进入模型验证步骤,软件将测量数据与理论值进行计算得到各点位偏差。根据偏差大小可以辅助判断使用的DH模型是否正确,也可以根据实际测量情况,选择去掉个别异常点进行分析校准,如图6,去掉异常点P6后,验证偏差整体下降。
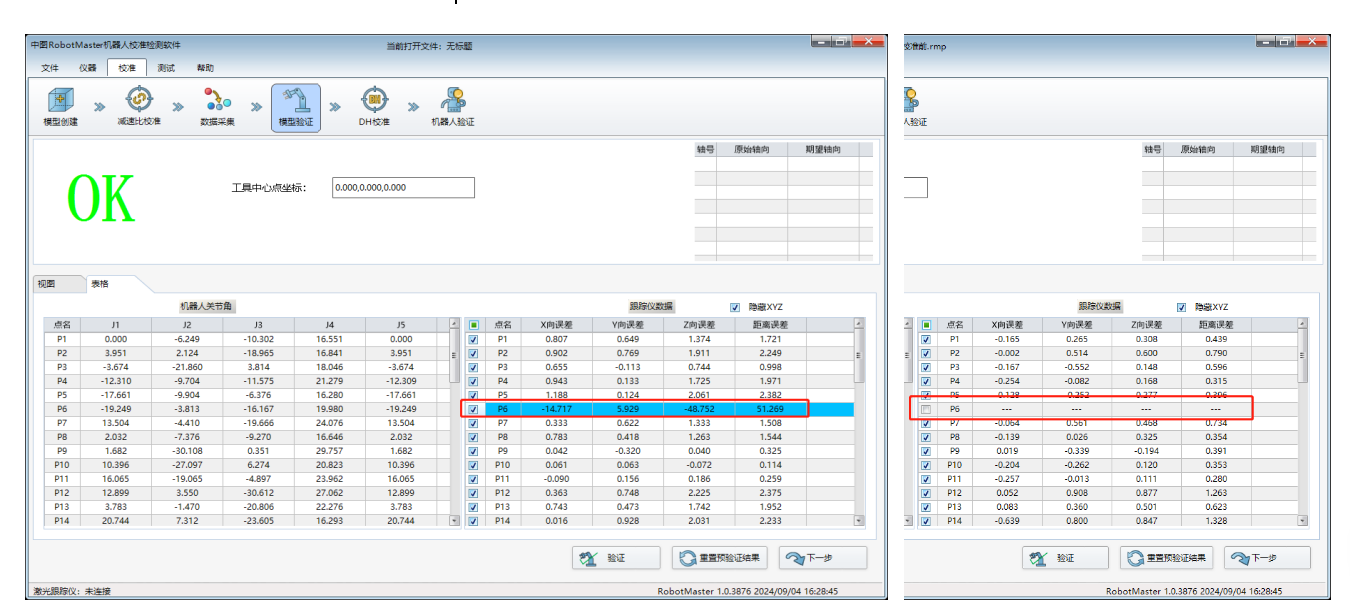 图6 整体计算P6点异常大(左)和去掉P6计算结果正常(右)
图6 整体计算P6点异常大(左)和去掉P6计算结果正常(右)3.3 模型校准
根据需要进行校准项勾选进行校准计算,得到校准后的DH模型(图7左),将补偿值修正到机器人控制器,完成对机器人参数的补偿,可以看到校准后的最大位置精度提升到到0.5mm左右(7右)。
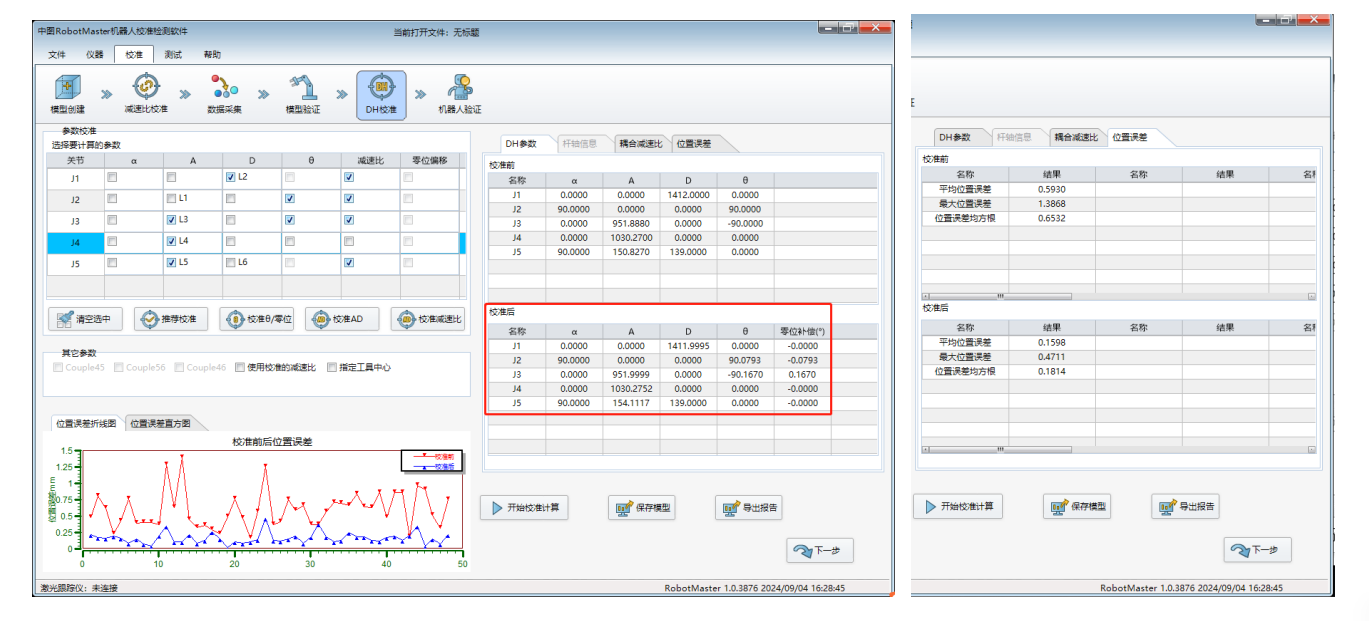 图7 DH模型校准(左)和去掉P6计算结果正常(右)
图7 DH模型校准(左)和去掉P6计算结果正常(右)3.4 校准验证
切换性能检测模块,该模块依据GB/T 12642即ISO 9283标准要求,帮助用户完成对工业机器人各项性能指标的测试。
创建立方体,进行S1-位姿准确度和重复性项测试,从图7可以看出,校准后的码垛机器人位置准确度最大在0.5mm左右,与校准结果相符。
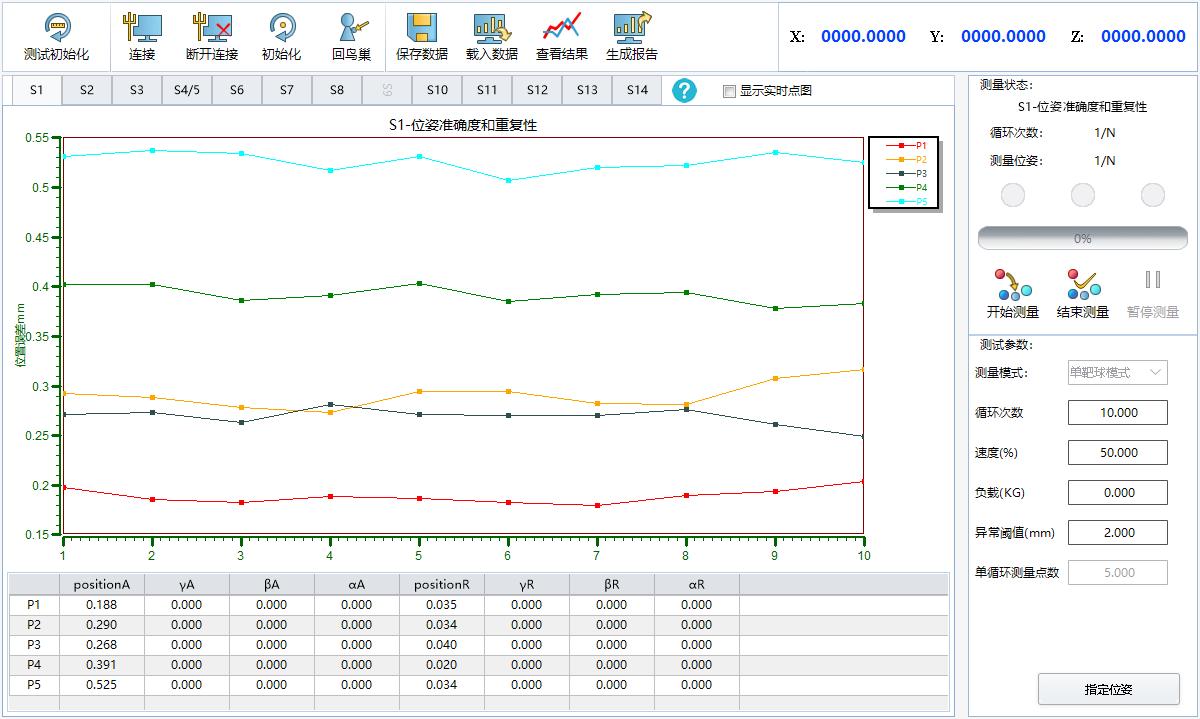 图8 位置准确度与重复性
图8 位置准确度与重复性4.结论
工业机器人校准及性能检测系统,借助RobotMaster软件强大的机器人校准和检测功能,配合GTS激光跟踪仪顶尖的跟踪测量性能,强强组合,已经在工业机器人领域取得了客户充分认可和肯定,未来将用更快的响应和更好的服务支持,满足机器人行业的不同需求,与客户共同提高,确保机器人的性能时刻处于理想状态。
-
机器人
+关注
关注
214文章
31634浏览量
224490 -
工业自动化
+关注
关注
17文章
3309浏览量
70183 -
激光跟踪仪
+关注
关注
0文章
86浏览量
9253
发布评论请先 登录
机器人关节高精度感知核心是什么?
码垛机器人监控管理平台解决方案
机器人拆码垛中高精度放置与垛型构建的解析分析:技术路径与核心要素
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
码垛机器人远程监控运维管理系统方案

M16圆形连接器为码垛机器人实现高效稳定的运行
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
RFID技术与码垛机器人深度协同的核心难题与破局之道
码垛机器人数据采集远程监控系统方案

码垛机器人远程运维云平台解决方案

卡诺普机器人搭载创想焊缝跟踪系统,实现搅拌设备焊接智能化升级
创想智控焊缝跟踪系统携手广数机器人实现农机齿轮焊接智能化升级
三坐标和激光跟踪仪的不同之处

激光干涉仪:解锁协作机器人DD马达的精度密码




评论