 一文讲清弧焊机器人三种焊接方法!
一文讲清弧焊机器人三种焊接方法!

弧焊机器人的焊接方法主要有气体保护电弧焊、钨极氩弧焊和等离子电弧焊三种,气体保护电弧焊是使用氩气、二氧化碳等气体作为焊接区域保护气体的焊接方法;钨极氩弧焊是用钨棒作为电极加上氩气进行保护的焊接方法;等离子电弧焊是利用等离子弧高能量密度束流作为焊接热源的熔焊方法。接下来无锡金红鹰带您了解。
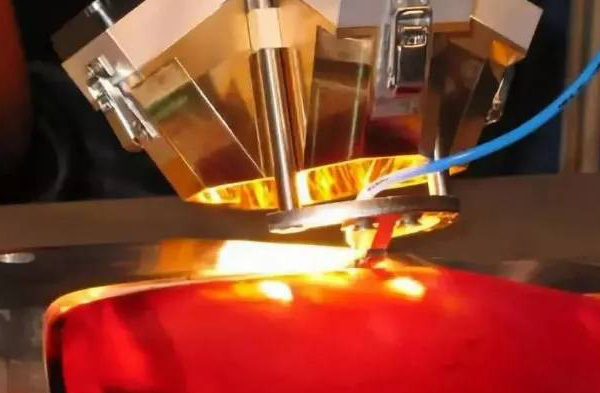
金红鹰氩弧焊机器人烧烤炉炉头焊接应用案例
1、气体保护电弧焊:
使用氩气作为焊接区域保护气体的氩弧焊、使用二氧化碳作为焊接区域保护气体的二氧化碳保护焊等,均归于气体保护电弧焊。这两种焊接方法分别对应无锡金红鹰的二/气保焊机器人和氩弧焊机器人。其基本原理是在以电弧为热源进行焊接时,同时从喷枪的喷嘴中接连喷出维护气体把空气与焊接区域中的熔化金属隔离开来,以维护电弧和焊接熔池中的液态金属不受大气中的氧、氮、氢等污染,以到达进步焊接质量的目的。简单理解就是利用二氧化碳、氩气等气体来隔离焊接区域的融化金属和空气,稳定焊接质量减少焊接缺陷。

工艺分类
气体保护电弧焊分钨极惰性气体保护焊和熔化极气体保护焊两大类。
1)钨极惰性气体保护焊
是在惰性气体的保护下利用钨电极与工件间产生的电弧热熔化母材和填充焊丝(如果使用填充焊丝)的一种焊接方法。用氩气作为保护气体的称钨极氩弧焊, 用氦气作为保护气体的称为钨极氦弧焊。由于氦气价格昂贵,在工业上广泛使用的是钨极氩弧焊。
钨极氩弧焊按操作方式分为手工焊、半自动焊和自动焊。以手工钨极氩弧焊应用最广泛,其次是自动钨极氩弧焊,半自动钨极氩弧焊则很少应用。
钨极惰性气体保护焊的应用
钨极惰性气体保护焊适宜于焊接各种有色金属和合金。
用0.5~5 Hz的低频脉冲电流进行焊接,可降低焊件的热输入,便于控制焊缝冷却结晶和控制熔深,适用于薄壁构件的焊接、悬空全位置焊接和厚壁结构的打底焊等。如用20 kHz高频脉冲电流,可使电弧挺直而稳定、焊缝金属晶粒细化,并可提高焊接速度。
特点
其特点是电弧稳定,输入能量易于控制,焊接质量高,对焊接位置和接头几何形状的适应性也较强。但因焊接电流受钨极许用电流的限制和向焊缝中添加填充金属不方便, 这种方法不利于焊接工件, 焊接生产率也低。
2)熔化极气体保护焊
采用可熔化的焊丝 (熔化电极) 与焊件之间的电弧热作为热源来熔化焊丝与母材金属,并向焊接区输送保护气体,使电弧、熔化的焊丝、熔池及附近的母材金属免受空气影响的气体保护焊。它适宜于焊接各种金属材料。
与钨极惰性气体保护焊相比,焊接生产率高许多倍。用细焊丝(一般直径小于1.6 mm),小电流时,可用于各种位置的焊接;用粗焊丝,大电流时, 则主要用于平焊位置。
熔化极气体保护焊主要有:
(1)熔化极惰性气体保护焊通常用氩、氦、或氩与氦的混合气体作保护气体, 熔滴过渡形式是喷射过渡或脉冲喷射过渡,适宜于焊接各种有色金属和奥氏体不锈钢和高温合金。
(2)氧化性混合气体保护焊保护气体由惰性气体和少量氧化性气体——O2、CO2或其混合气体(一般O2为2%~5%,CO2为5%~20%)混合而成。熔滴过渡形式为短路过渡、喷射过渡或脉冲喷射过渡,适用于碳钢、合金钢和不锈钢等黑色金属材料的焊接。
(3)二氧化碳气体保护焊保护气体主要用二氧化碳,有时在其中加入一定量的氧(5%~20%)。熔滴过渡形式是短路过渡或滴状兼短路过渡,只适宜于焊接碳钢和合金结构钢,焊接成本低。
(4)药芯焊丝气体保护焊采用中心含有药芯(焊剂)的管状焊丝,用二氧化碳或二氧化碳加氩气体作为保护气体,兼有二氧化碳气体保护焊和手弧焊的某些特点,适宜于焊接碳钢、低合金钢、镍及其合金等。
主要特点:
①由于采用二氧化碳气体和焊剂的联合保护,易于获得优质焊缝;
②电弧稳定,飞溅少,焊缝成形好;
③对焊件钢材成分的适应性强;
④焊接生产率高,约为手弧焊的3~5倍。
(5)气电立焊是由熔化极气体保护焊和电渣焊发展而形成的一种熔化极气体保护焊方法。保护气体采用二氧化碳气体或氩气加氧气。其主要优点是可不开坡口焊接厚板,生产率高、成本低。
气体保护电弧焊加入气体的原因
在气体保护电弧焊初期,使用的主要是单一气体;如氩气(Ar)、氦气(He)和CO2气,后来发现一种气体中加入一定分量的另一种或两种气体后,可以分别在细化熔滴、减少飞溅、提高电弧的稳定性、改善熔深以及提高电弧的温度等方面获得满意的效果。
常用的混合气体有:
(1)Ar+He。广泛用于大厚度铝板及高导热材料的焊接,以及不锈钢的高速机械化焊接。
(2)Ar+H2。利用混合气体的还原性来焊接镍及其合金,可以消除镍焊缝中的气孔。
(3)Ar+O2混合气体(O2量为1%)。特别适用于不锈钢MIG焊接,能克服单独用氩气时的阴极飘移现象。
(4) Ar+CO2或Ar+CO2+O2。适于焊接低碳钢和低合金钢,焊缝成形、接头质量以及电弧稳定性和熔滴过渡都非常满意。
2、钨极氩弧焊:
钨极氩弧焊时常被称为TIG焊,是一种在非消耗性电极和工作物之间产生热量的电弧焊接方式,以高熔点的金属钨棒作为焊接时发生电弧的一个电极,并处在氩气维护下的电弧焊,此保护是由气体或混合气体流供应,必须是能提供全保护,因为甚至很微量的空气混入也会污染焊道,常用于不锈钢、高温合金等要求严厉的焊接。
原理
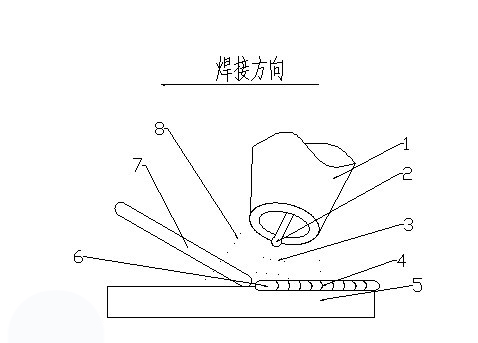
钨极氩弧焊是用钨棒作为电极加上氩气进行保护的焊接方法,其方法构成如图所示。焊接时氩气从焊枪的喷嘴中连续喷出,在电弧周围形成保护层隔绝空气,以防止其对钨极、熔池及邻近热影响区的氧化,从而获得优质的焊缝。焊接过程中根据工件的具体要求可以加或者不加填充焊丝。
特点
这种焊接方法由于电弧是在氩气中进行燃烧,因此具有以下优缺点:
1) 氩气具有极好的保护作用,能有效的隔绝周围空气;它本身既不与金属起化学反应,也不溶于金属,使得焊接过程中的冶金反应简单易控制,因此获得较高质量的焊缝提供良好条件。
2)钨极电弧非常稳定,即使在很小电流情况下(<10a)仍可稳定燃烧,特别适用于薄板材料焊接。<>
3)热源和填充焊丝可分别控制,因而热输入容易调整所以这种焊接方法可进行全方位焊接,也是实现单面焊双面成型的理想方法。
4)由于填充焊丝不通过电流,故不产生飞溅,焊缝成型美观。
5)交流氩弧焊在焊接过程中能够自动清除焊件表面的氧化膜作用,因此,可成功地焊接一些化学活泼性强的有色金属,如铝、镁及合金。
6)钨极承载电流能力较差,过大的电流会引起钨极的熔化和蒸发,其微粒有可能进入熔池而引起夹钨。因此,熔敷速度小、熔深浅、生产率低。
7)采用氩气较贵,熔敷率低,且氩弧焊机有较复杂,和其他焊接方法(如焊条电弧焊、埋弧焊、CO2-气体保护焊)比较,生产成本较高。
8)氩弧周围受气流影响较大,不易室外工作。
3、等离子电弧焊:
由钨极氩弧焊发展起来的一种焊接方法,是指利用等离子弧高能量密度束流作为焊接热源的熔焊方法。等离子弧焊接具有能量集中、生产率高、焊接速度快、应力变形小、电孤稳定、具有弧柱细长,能量密度高的特色,且适宜焊接薄板和箱材等特点,因而在焊接领域有着广泛的应用,特别适合于各种难熔、易氧化及热敏感性强的金属材料(如钨、钼、铜、镍、钛等) 的焊接。等离子弧是离子气被电离发生高温离子气流,从喷嘴细孔中喷出,经压缩构成细长的弧柱,高于惯例的自由电弧,如:氩弧焊仅达5000-8000K。
原理
等离子弧切割是一种常用的金属和非金属材料切割工艺方法。它利用高速、高温和高能的等离子气流来加热和熔化被切割材料,并借助内部的或者外部的高速气流或水流将熔化材料排开直至等离子气流束穿透背面而形成割口。无锡金红鹰等离子弧切割对应机器人是三维等离子切割机器人。
种类
等离子弧有两种工作方式。一种是“非转移弧”,电弧在钨极与喷嘴之间燃烧,主要用於等离子喷镀或加热非导电材料。
另一种是“转移弧”,电弧由辅助电极高频引弧后,电弧燃烧在钨极与工件之间,用於焊接。形成焊缝的方式有熔透式和穿孔式两种。前一种形式的等离子弧只熔透母材,形成焊接熔池,多用于0.8~3mm厚的板材焊接;后一种形式的等离子弧只熔穿板材,形成钥匙孔形的熔池,多用于3~12mm厚的板材焊接。此外,还有小电流的微束等离子弧焊,特别适合於0.02~1.5毫米的薄板焊接。
特点
(1)微束等离子弧焊可以焊接箔材和薄板。
(2)具有小孔效应,能较好实现单面焊双面自由成形。
(3)等离子弧能量密度大,弧柱温度高,穿透能力强,实现10~12mm厚度钢材不开坡口焊接,能一次焊透双面成形,焊接速度快,生产率高,应力变形小。
(4)设备比较复杂,气体耗量大,组对间隙、对工件的洁净要求严格,只宜于室内焊接。
审核编辑黄宇
-
机器人
+关注
关注
213文章
30580浏览量
219530 -
焊接
+关注
关注
38文章
3507浏览量
62748
发布评论请先 登录
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
智能焊接机器人当前的技术瓶颈是什么
焊接机器人新品三大趋势分析
工业机器人的特点
盘点#机器人开发平台
2024年中国弧焊机器人市场销量分析






 工商网监
工商网监
评论