 【先楫半导体HPM6750EVKMINI评估板试用体验】基准性能测试之二:coremark
【先楫半导体HPM6750EVKMINI评估板试用体验】基准性能测试之二:coremark

本文来源电子发烧友社区,作者:李先生, 帖子地址:https://bbs.elecfans.com/jishu_2284342_1_1.html
前言
 获取代码
获取代码
 添加代码
添加代码
 修改代码
修改代码
前言
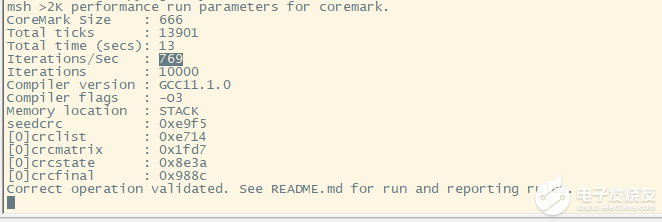
根据手册描述性能可达5.6 CoreMark / MHz。
我们就实际”跑个分”看看。
https://github.com/eembc/coremark
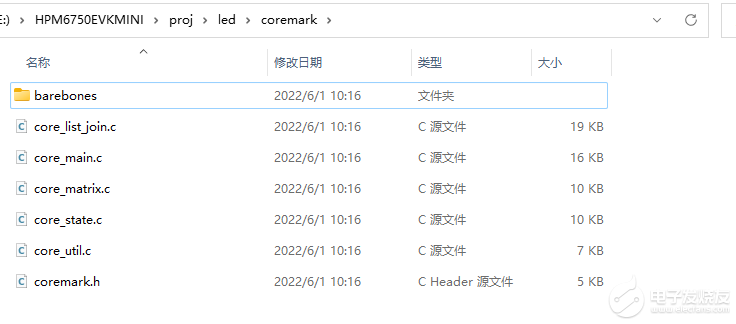
进入HPM6750EVKMINI/proj/led目录
Clone代码
git clonehttps://github.com/eembc/coremark
删除其他文件,只保留如下内容,并删除barebones下的.mak文件
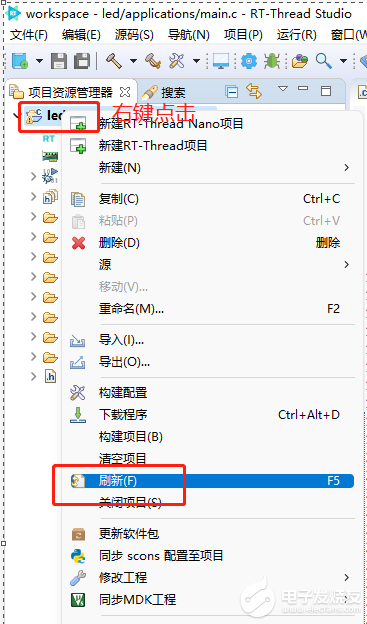
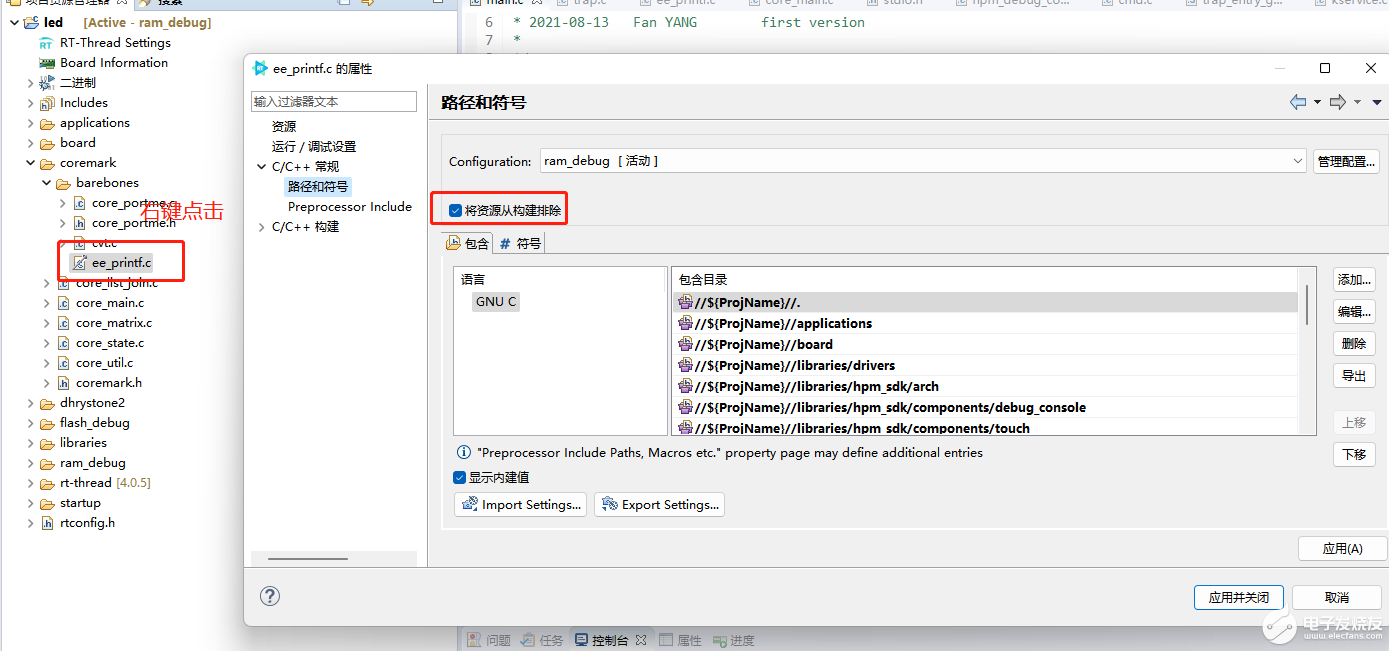
按照上一步将文件下载到工程目录下后,按照如下方式刷新
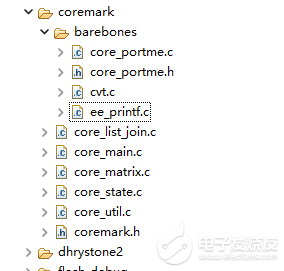
可以看到源码添加到了工程目录
按如下设置不编译ee_printf.c因为已经有打印函数rt_kprintf。
coremark.h中
#include"rtthread.h"
#include"core_portme.h"改为
#include"barebones/core_portme.h"
增加宏定义
#ifHAS_PRINTF
#defineee_printf printf
#endif
改为
//#ifHAS_PRINTF
#defineee_printfrt_kprintf
//#endif
core_portme.h中
#defineHAS_FLOAT1
改为
#defineHAS_FLOAT0
前面添加#include
#defineCOMPILER_FLAGS
FLAGS_STR/* "Please put compiler flags here (e.g. -o3)" */
#endif
按照实际修改比如
#defineCOMPILER_FLAGS
“-O3”
#endif
core_portme.c中
#include"coremark.h"改为
#include"../coremark.h"
实现接口
barebones_clock()
使用rt_tick_get()
所以前面要包含#include"rtthread.h"
CORETIMETYPE
barebones_clock()
{
//#error
// "You must implement a method to measure time in barebones_clock()! This function should return current time.n"
returnrt_tick_get();
}
#defineEE_TICKS_PER_SEC (CLOCKS_PER_SEC / TIMER_RES_DIVIDER)改为
#defineEE_TICKS_PER_SEC RT_TICK_PER_SECOND
因为已经初始化了环境所以注释掉portable_init的
//#error
// "Call board initialization routines in portableinit(if needed), in particular initialize UART!n"
core_main.c中
main改为core_main
ee_printf("Total time (secs): %dn", time_in_secs(total_time));改为
ee_printf("Total time (millisecond): %dn", time_in_secs(total_time*1000));
if(time_in_secs(total_time) > 0)
ee_printf("Iterations/Sec : %dn",
(int)((default_num_contexts * results[0].iterations*1000.0
/ time_in_secs(total_time*1000))));
main.c中
调用
intcore_main(intargc,char*argv[]);
core_main(0, 0);
由于定义了大数组
#if(MEM_METHOD == MEM_STACK)
ee_u8stack_memblock[TOTAL_DATA_SIZE * MULTITHREAD];
#endif
所以main的任务栈要修改大一些
Rtconfig.h中#defineRT_MAIN_THREAD_STACK_SIZE (2048*4)
main任务优先级也提高一点大于shell的优先级
#defineRT_MAIN_THREAD_PRIORITY 21
测试
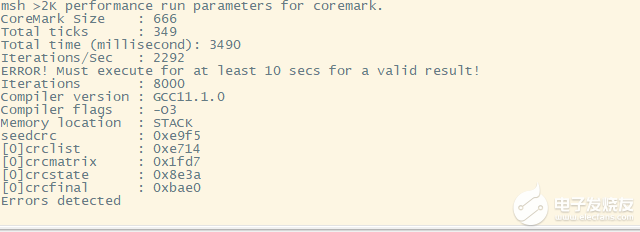
如果提示ERROR! Must execute for at least 10 secs for a valid result!
则将#defineITERATIONS 10000改大一点,测试时间要大于10秒。
配置为0则自动计算迭代次数。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mcu
+关注
关注
147文章
19232浏览量
405181 -
先楫半导体
+关注
关注
12文章
294浏览量
3414
发布评论请先 登录
相关推荐
热点推荐
【媒体视角】“五高一低” 筑核心,先楫半导体助力具身智能行业新突破
及嵌入式解决方案核心提供商,上海先楫半导体科技有限公司(先楫半导体、HPMicro)紧跟产业浪潮

CES2026:先楫半导体隆重推出HPM5E3Y,打造机器人运动控制芯片阵容
新纪元。作为高性能微控制器产品及嵌入式解决方案提供商,上海先楫半导体科技有限公司 (先楫

先楫解决方案 | 变频器EtherCAT通讯卡+远程IO方案
先楫半导体推出的基于HPM5E00系列的工业级变频器EtherCAT通讯卡及远程IO解决方案,致力于帮助开发者在以HPM微控制器作为设备从站

先楫半导体荣膺“年度优秀AI机器人创新产品奖” | “芯”动力赋能产业升级
2025年11月6日深圳,在业内知名媒体电子发烧友网主办的第十三届电机控制先进技术论坛上,上海先楫半导体科技有限公司(先楫
元禾控股投资先楫半导体:国产高性能MCU驶入机器人控制“快车道”
RISC-V高性能芯片赛道。此次融资不仅是对先楫半导体企业技术实力的认可,更标志着我们开启在机器人控制领域从“蓄势待发”到逼近爆发临界点的新篇章。随着全球智能机器人产
先楫半导体获浦东产业基金战略投资,深入布局机器人赛道创“芯”领域
2025年9月5日,上海浦东新区|国产高性能微控制器产品及嵌入式解决方案提供商“上海先楫半导体科技有限公司”(先
上榜福布斯:先楫半导体入选亚洲百家最具潜力企业《Forbes Asia 100 to Watch》
福布斯亚洲(ForbesAsia)于美东时间2025年8月25日发布《ForbesAsia100toWatch》榜单,上海先楫半导体科技有限公司(先
【上海晶珩睿莓1开发板试用体验】4、Coremark性能测试
CoreMark 介绍
CoreMark 是由 EEMBC(嵌入式微处理器基准委员会)维护的一个轻量、可移植的基准套件,用于评估处理器的整型
发表于 08-18 22:18
先楫半导体高性能MCU入驻立创商城,国产芯势力再添新动能
先楫半导体(HPMicro)宣布其全系列高性能MCU芯片正式上架立创商城(LCSC),标志着国产高端MCU在供应链渠道与生态服务方面迈上新台阶,国产芯势力再添新动能。



评论