 【技术干货】AI与边缘计算加持,是时候深入了解机器人了!
【技术干货】AI与边缘计算加持,是时候深入了解机器人了!

成长计划
工程师成长计划第十三期,入门智能机器人设计。
从机器狗到仿生机器人,从扫地机器人到无人驾驶出租车。各种各样的清洁机器人,送货机器人已经融入人们的生活,并且创造了巨大的商业价值。
在高性能边缘计算芯片和人工智能的加持下,机器人,正在从实验室走向商业落地。对于工程师而言,抓住机器人领域的快速发展的机会,才能立于不败之地。
ROS2基础入门到实践教程
硬声UP主:鱼香ROS
大纲:
开发环境准备;
虚拟机与ROS2安装;
ROS2基础概念;
ROS2节点;
ROS2功能包;
编译工具介绍与安装;
ROS2通讯接口介绍;
数据可视化工具介绍;
……共95讲
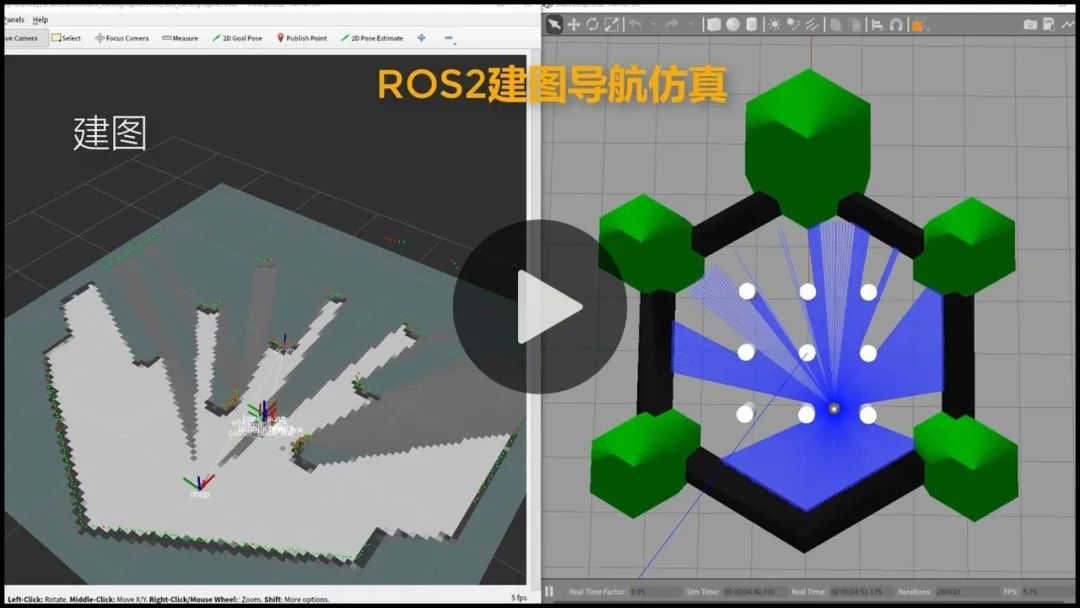
ROS2进阶篇 | 机器人学基础|机器人建模与仿真

硬声UP主:鱼香ROS
大纲:
常见矩阵定义与运算;
安装Miniconda与Jupyter;
使用numpy定于矩阵与运算;
空间位姿描述介绍;
旋转矩阵与位置矢量;
使用numpy进行位姿变换;
……共15讲
开源六足机器人功能介绍和运动测试
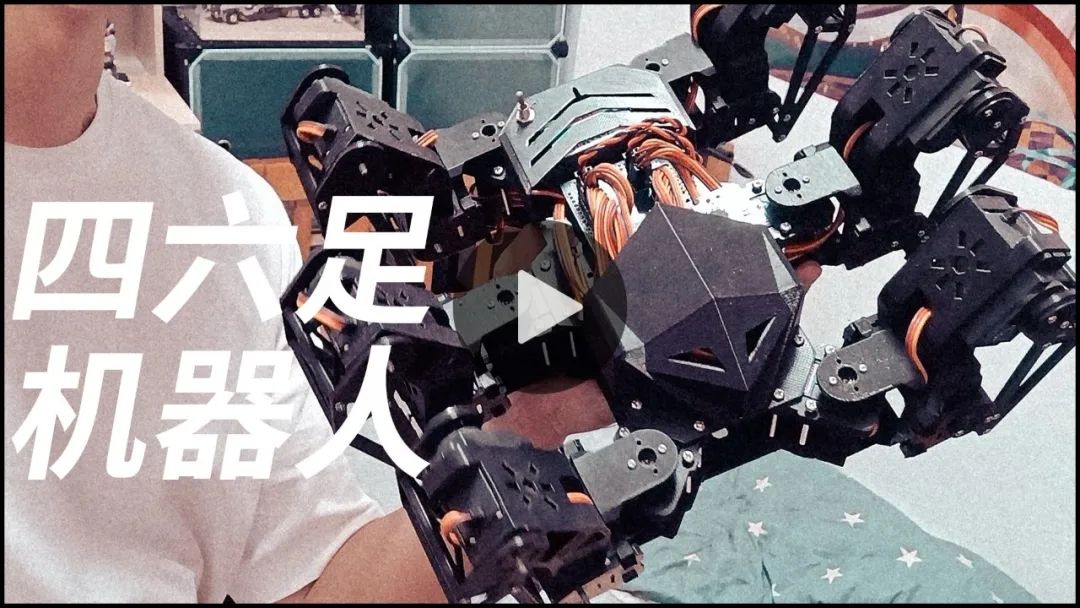
硬声UP主:LeeSophia_智造师
大纲:
Pyhon代码结构、舵机较准流程及控制界面
足式机器人步态编程基础介绍
六足机器人功能介绍和运动测试
用Python写一个步态动画展示程序
使用树莓派和Python驱动的六足机器人
……共7讲
使用 ROS 控制舵机机器臂自动拾取和放置
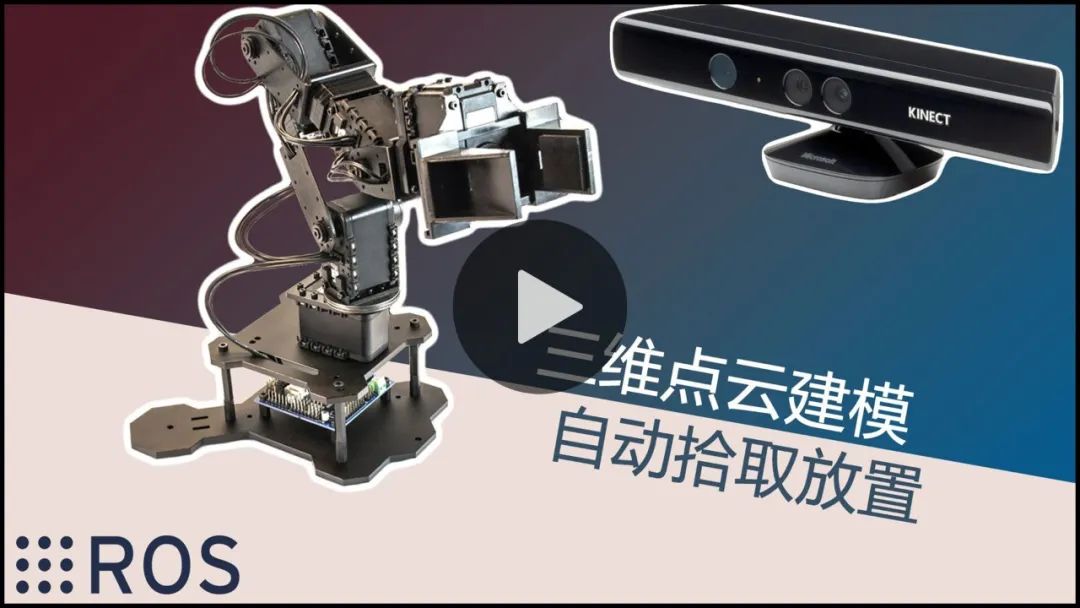
硬声UP主:LeeSophia_智造师
介绍:ROS代码和机器臂运动演示,但其实涉及执行 Pick and Place 任务的主要思想,包括视觉感知和坐标变换、机器臂正逆运动学、运动规划等。必须时刻记住自主机器人的三个特性:感知、决策和执行。

硬声UP主:薪尽火传
大纲:
使用MATLAB设计机械臂算法
仿真平台,运动学,运动规划
轨迹跟踪仿真
机械臂仓库运输仿真
视觉控制教程
十分钟掌握机器人运动学|理论和仿真讲解
路径规划_RRT算法原理+源码
基于OMPL的运动规划介绍与教程
……共29讲
六自由度stewart轨迹控制实验
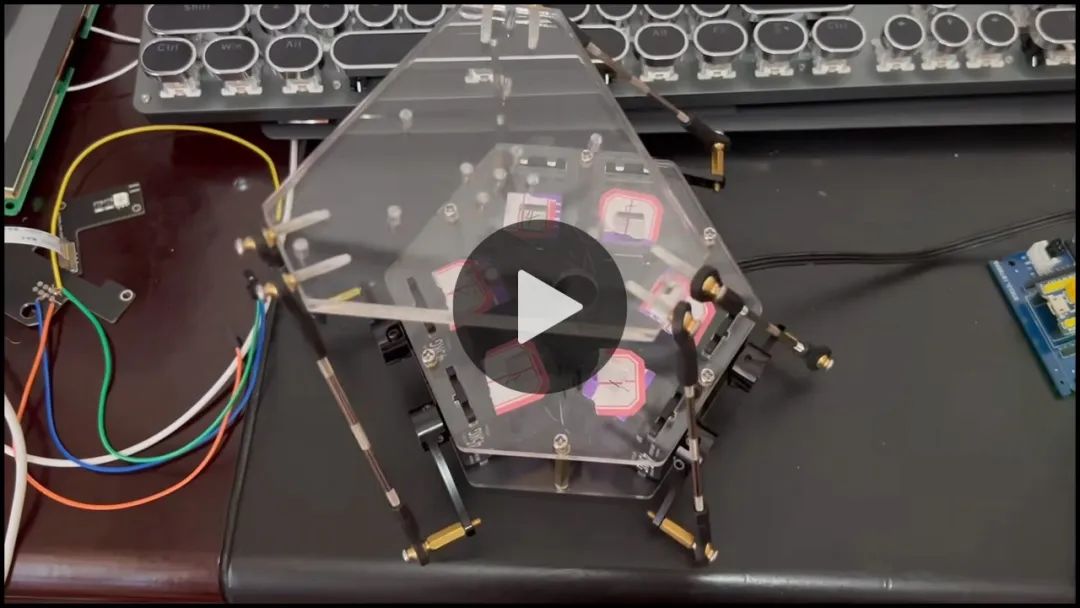
硬声UP主:ZSH实验室
介绍:Stewart动态平台,可用于赛车和飞行模拟,使用STM32和总线舵机控制。
小到U盘,大到石头,万物可抓的平面抓取检测算法
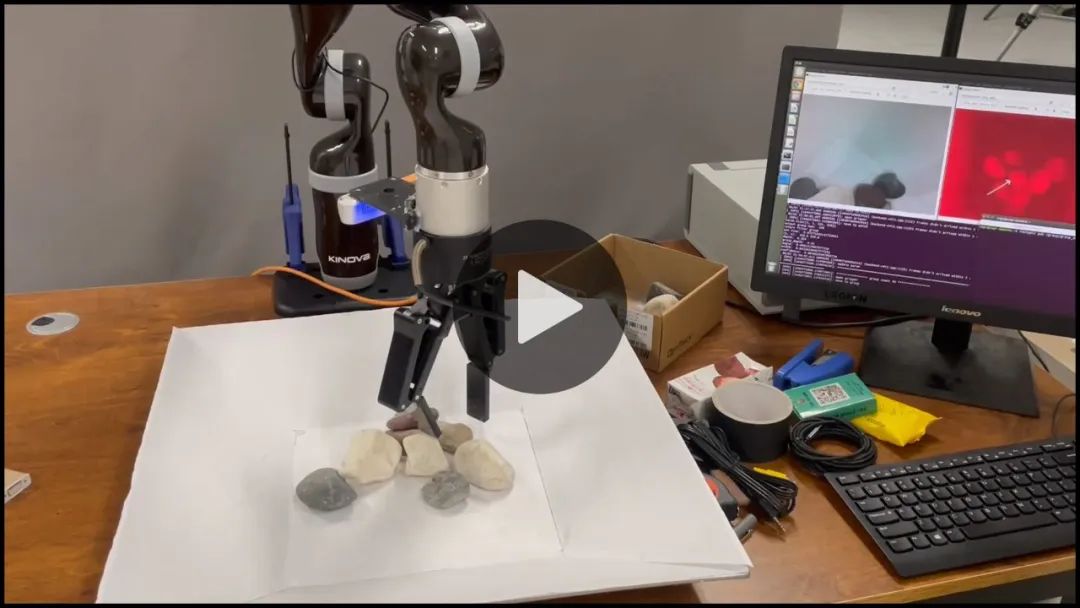
硬声UP主:wangdx机器人
介绍:
使用realsense d435i相机,夹爪使用robotiq 2F-140,相机离物体40cm。
往期精彩






点击阅读原文,发现更多机器人开发技巧!
-
机器人
+关注
关注
213文章
30600浏览量
219655 -
AI
+关注
关注
89文章
38153浏览量
296790 -
边缘计算
+关注
关注
22文章
3473浏览量
52699
原文标题:【技术干货】AI与边缘计算加持,是时候深入了解机器人了!
文章出处:【微信号:gh_9b9470648b3c,微信公众号:电子发烧友论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
探索RISC-V在机器人领域的潜力
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
医疗 AI 机器人迈入 “实时智能时代”,杰和科技 LH85 边缘计算盒成关键推手






 工商网监
工商网监
评论