 使用ISAAC Sim加速AI机器人的开发、测试和培训
使用ISAAC Sim加速AI机器人的开发、测试和培训
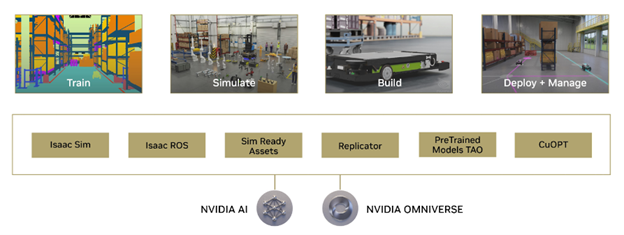
今天, NVIDIA 宣布 2022.1 版 NVIDIA ISAAC Sim 。 作为一种机器人仿真和合成数据生成( SDG )工具, NVIDIA Omniverse 应用程序加速了机器人领域人工智能的开发、测试和培训。
使用 ISAAC Sim ,开发人员可以生成生产质量数据集来训练 AI 感知模型。开发人员还将能够模拟机器人导航和操纵,并构建一个测试环境来不断验证机器人应用程序。
最新版本通过 NVIDIA ISAACCortex(一种用于训练协作机器人(COBOT)的决策框架)和GPU加速强化学习(RL)框架 ISAAC Gym(一种GPU加速强化学习)框架)等新工具,推进了人工智能机器人的时代。 NVIDIA ISAAC Replicator是一套合成数据生成工具、API和工作流,它也已更新了新功能,可以按程序为SDG生成工业环境。
NVIDIA ISAAC 是 2022.1 版本亮点
ISSAC Cortex:编程 cobot 任务就像编程游戏 AI 一样简单。利用此决策框架帮助 COBOT 开发任务感知和自适应技能。使用它对世界的信念表示,类似于机器人的大脑,真实或模拟的数据可以用作输入,并生成最终的驱动。
ISAAC Gym:用几分钟而不是几周的时间训练机器人。使用 RL 训练复杂的机器人技能。 ISAAC GYM 是一种 GPU 加速工具,它将整个 RL 训练工作流保持在 GPU 上,这对于减少训练时间至关重要。
Omnigraph: 使用可视化编程简化应用程序开发和调试。在这个 Omniverse 可视化编程和脚本环境中,通过可视化方式将计算节点连接在一起,构建机器人应用程序。机器人应用程序往往是非常模块化的,非常适合于可视化编程。
ISAAC Sim/露台连接器:根据任务在两个模拟器之间移动。使用 Gazebo 的 ROS 开发人员可以将仿真资产导入 ISAAC Sim 卡,以执行生成合成数据集或高保真渲染等任务。此外,通过连接 Omniverse 的 nucleus 服务器,多个露台模拟可以保持实时同步。
其他特征:
Windows 支持(有限)
新机器人
四足动物: A1 , GO1 , Anymal
AMR : Obelix
新的模块化仓库和输送机资产
Omnigraph 中实施的新 ROS 管道
使用合成数据训练 AI
ISAAC Replicator 是 ISAAC Sim 中的合成数据生成工具。合成数据在机器人技术中非常有用,可以引导训练,解决长尾数据集的挑战,并提供不可用的真实世界数据,如合成视频中的速度和方向。自治机器需要在训练中使用合成数据,以确保模型的鲁棒性。
在最新版本中,添加了一个名为 SceneBlox 的新 SDG 功能,以按程序生成场景。 SceneBlox 可用于自动创建仓库等工业环境。还添加了新的示例,演示了如何使用 Replicator 生成合成数据和训练姿势估计模型。
关于作者:
Gerard Andrews 是专注于机器人开发社区的高级产品营销经理。在加入 NVIDIA 之前,Gerard在Cadence担任产品营销总监,负责许可处理器IP的产品规划、营销和业务开发。他拥有佐治亚理工学院电子工程硕士学位和南方卫理公会大学电子工程学士学位。
审核编辑:郭婷
-
机器人
+关注
关注
206文章
27012浏览量
201354 -
AI
+关注
关注
87文章
26405浏览量
264006
发布评论请先 登录
相关推荐
NVIDIA Isaac机器人平台升级,加速AI机器人技术革新
NVIDIA入局人形机器人!Isaac平台迎来重要更新

NVIDIA Isaac将生成式AI应用于制造业和物流业

使用 NVIDIA Isaac 仿真并定位 Husky 机器人

LabVIEW的六轴工业机器人运动控制系统
奥比中光3D相机矩阵助力更强机器人开发
NVIDIA Isaac 平台先进的仿真和感知工具助力 AI 机器人技术加速发展
ai人工智能机器人
从 0 到 1 搭建机器人 | 利用 NVIDIA Isaac Sim 创建虚拟环境进行仿真开发与测试
Omniverse 中文课程系列 7:使用 Isaac Sim 实现机器人仿真入门

基于 NVIDIA Jetson 使用硬件在环设计机器人

NVIDIA Isaac Sim 助力 COONEO 加速机器人设计、算法研究与应用开发

使用 NVIDIA Isaac Sim、ROS 和 Nimbus 开发多机器人环境

COMPUTEX2023 | 达明机器人采用 NVIDIA Isaac Sim 优化自动光学检测
使用 ROS 2 MoveIt 和 NVIDIA Isaac Sim 创建逼真的机器人模拟





 工商网监
工商网监
评论