 自动驾驶路线之争:纯视觉方案vs激光雷达加视觉方案
自动驾驶路线之争:纯视觉方案vs激光雷达加视觉方案

自1939年通用汽车公司面向全球展示世界上第一辆自动驾驶概念车,此后的八十多年里,全球各大科技公司和车企陆续将传感器、摄像头、计算芯片、存储芯片等塞进车子里,并不断在轨道、沙漠等特定场景下去尝试自动驾驶。时至今日,厂商已经在一点点让自动驾驶渗透到家用车市场,并致力于在这个领域实现更高级别的自动驾驶。
然而,我们也能看到,在技术和方案推进的过程中,自动驾驶的实现方式出来了明显的“派系之争”。一派认为应该走视觉与雷达的融合路线;另一派则认为纯视觉实现就足够了。派系之争的根源是当前每个厂商对自动驾驶都有自己的理解,且都取得了一定的效果。当然,通过贸泽电子网站上在售的、各种应用于自动驾驶的元器件,我们也发现了两个派系之间的一些共同点,比如灵活设计和性能冗余等。那么,接下来就让我们展开聊一聊。
纯视觉 VS 多传感器融合
对于自动驾驶,还有很多其他的叫法,比如无人驾驶、电脑驾驶汽车或者轮式机器人等等。这些名称的核心要义是通过计算机与人工智能技术的融合,代替人类驾驶员,让车子自行完成完整、安全、有效的驾驶行为。无疑,这种智能化的驾乘体验将会成为新时代汽车一个重要的卖点,吸引全球科技巨头和车企纷纷投资布局。根据市场调研机构IHS Markit的预测数据,2022年全球自动驾驶汽车市场规模将达到1629亿美元,同比增长14%左右,预计2030年全球自动驾驶汽车市场规模将达到32,197亿美元,年复合增长率高达45.21%。

图1:全球自动驾驶汽车市场规模(数据源自:IHS Markit)
在自动驾驶的设想下,当选定目的地后,汽车会利用导航系统规划最佳路线,到达目的地,期间人类驾乘人员不需要为此分心,可以尽情享受科技带来的便捷和舒适。然而,当人类驾驶汽车时,我们都会用“眼观六路耳听八方”来描述驾驶员的状态,因此自动驾驶汽车需要具备比这更强的感知性能。环境感知与精准定位、路径规划、线控执行一起并称自动驾驶四大核心技术。当汽车被置于社会应用场景下时安全可靠的感知是不可或缺的。
在环境感知上,纯视觉方案仅依靠摄像头搜集环境信息,然后将图片传输到计算芯片进行分析,比较像人类驾驶车辆,通过眼睛来捕捉周围的信息,然后传输给大脑做决策。当然,纯视觉+AI的方案比人眼的视角更广,通过大量的图片信息让汽车内部的计算系统拥有以车子为中心的“上帝视角”。纯视觉方案的优点主要是,实现成本相对更低,更接近人类驾驶,通过高分辨率、高帧率的成像技术获取的环境信息更加丰富;缺点主要是,摄像头捕捉环境信息容易受到环境光的干扰,且纯视觉方案对于图像的处理更依赖训练,难免出现环境认知的“死角”。目前,采用纯视觉方案实现自动驾驶的企业主要有特斯拉、百度和极氪等。
“多传感器融合”方案则是通过摄像头、毫米波雷达、激光雷达等设备一起收集车辆的周边信息。激光雷达的加入能够获取更深度的空间信息,对于物体的位置、距离和大小感知更准确,且由于激光雷达是自发光并不受环境光影响。不过,“多传感器融合”方案也有自己的局限性,激光雷达容易受到雨雪雾天气的影响。由于激光雷达本身数千美元的硬成本,加上“多传感器融合”往往对计算芯片有更高的算力要求,因此成本没有优势。目前,采用“多传感器融合”方案实现自动驾驶的企业主要有小鹏、蔚来、极狐等。
两大派系在技术实现上,都是基于硬件来帮助汽车构架自身周围的3D信息,然后让计算芯片提取关键信息来做出驾驶决定。未来,“纯视觉”要解决的是光致盲和认知错误等问题,“多传感器融合”本身的融合就是一大技术挑战,且算法本身还得优化,也需要更低成本的激光雷达产品。目前来看,两大技术路线都还有很多潜能值得挖掘。
当然,高级别自动驾驶尚未打开家用这个大市场,路线之争不仅是环境感知层面,还有单车智能和路车协同之间的争议。但正如上文所述,元器件厂商对于自动驾驶的支持都选择了高灵活性和性能冗余等方式,给每一种实现方案都提供尽可能的支持。下面我们就着重为大家介绍几款贸泽电子网站上在售的可应用于自动驾驶的元器件产品,帮助大家完成各种不同的自动驾驶实现方案。
为下一代ADAS助力的FPGA
无论是倾向于怎样的技术流派,对于实现自动驾驶而言,摄像头都是必要的,它们充当着汽车的“眼睛”。那么,我们第一款要推荐的方案就是可应用于下一代ADAS开发的FPGA评估套件——UltraScale+™ MPSoC ZCU102评估套件,它在视觉处理上非常出色,来自制造商AMD Xilinx,贸泽电子网站上的制造商编号为EK-U1-ZCU102-G-J。

图2:MPSoC ZCU102评估套件(图源:AMD Xilinx)
MPSoC ZCU102评估套件采用Zynq UltraScale+ MPSoC器件,作为系统核心,该器件在核心配置、工艺架构、器件尺寸、系统功耗、软件支持和图形处理等方面具有行业领先的产品特性。
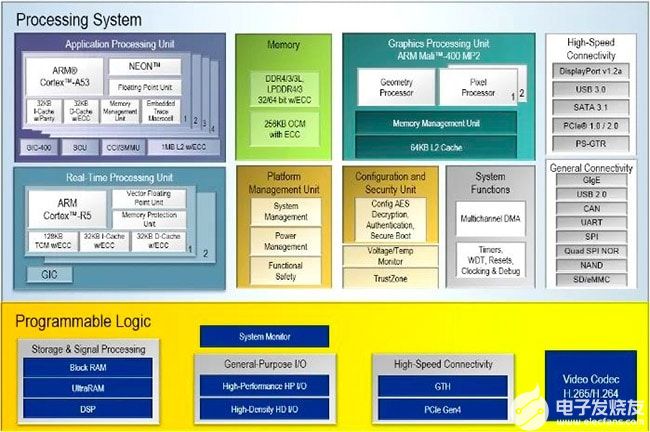
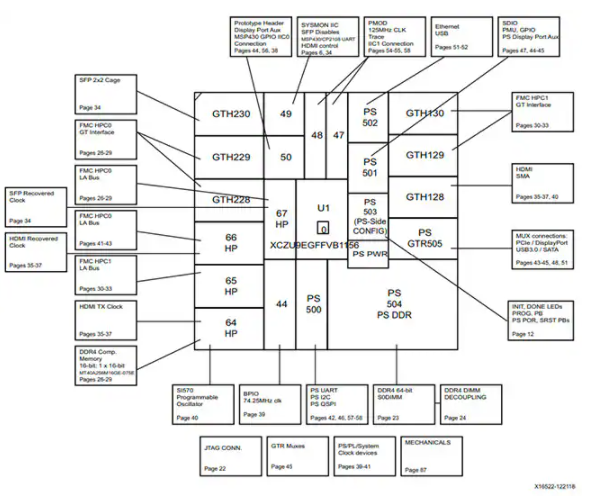
图3:Zynq UltraScale+ MPSoC器件系统框图(图源:AMD Xilinx)
通过上方的系统框图能够看到,Zynq UltraScale+ MPSoC器件基于四核ARM® Cortex-A53和双核Cortex-R5实时处理器打造,并搭配灵活应变的内存层级。异构处理的产品设计加上器件本身的可编程特性,在提供更好性能的同时,允许工程师朋友多角度优化自己的应用。
16nm FinFET配合超小型化封装让Zynq UltraScale+ MPSoC器件拥有无与伦比的计算密度,不受应用条件限制,并提供更好的信号完整性。
支持AI/ML的深度学习处理单元以及Mali-400 MP2图形处理单元的存在,让Zynq UltraScale+ MPSoC器件可以胜任下一代ADAS系统对于视觉系统和相关算法的高要求,H.264/H.265视频编解码器则进一步提升了这方面的性能。同时,丰富的外设接口让Zynq UltraScale+ MPSoC器件对支持“多传感器融合”也是毫无压力。
可以说,异构、高性能、超小型、高算力的Zynq UltraScale+ MPSoC器件是一颗用于打造下一代ADAS应用的理想器件,该器件所提供的64位处理器可扩展性更是为方案设计带来了无限可能。想要体现该器件非凡的魅力,MPSoC ZCU102评估套件无疑提供了出色的平台。
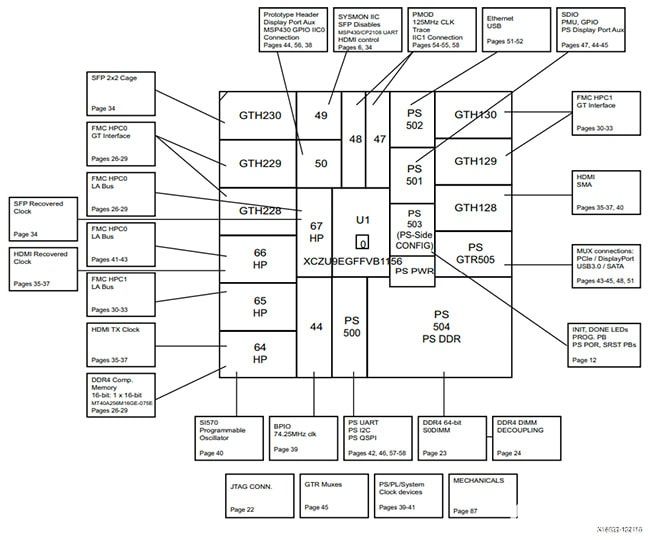
图4:MPSoC ZCU102评估套件系统框图(图源:AMD Xilinx)
MPSoC ZCU102评估套件针对采用Zynq Ultrascale+ MPSoC的应用原型设计进行了优化,包括下一代ADAS。如上图所示,该评估套件支持Zynq Ultrascale+ MPSoC的全部主要外设和接口,比如PCIe根端口Gen2x4、USB3、显示端口和SATA等,支持各种方案的设计实现。
可用于ADAS原型设计的FPGA
在自动驾驶推进的过程中,我们看到,目前基本是厂商在主导技术路线之争。而更进一步来讲,即便是相同的路线下,由于厂商对于各个ECU功能单元的界定不同,系统架构和核心芯片的功能也会有差异。从元器件角度分析,由于每个公司对自动驾驶的理解不同,产品设计理念也有很大差异。那么,如何才能高效找到更有市场竞争力的设计方案呢?接下来这款产品能够帮到你。
下面我们为大家介绍的是来自制造商AMD Xilinx的另一款解决方案——Versal™ AI Core系列VCK190评估套件,贸泽电子上,该产品的制造商编号为EK-VCK190-G-ED。

图5:Versal™ AI Core系列VCK190评估套件(图源:AMD Xilinx)
根据Xilinx Wiki的介绍,VCK190评估套件是第一个 Versal™ AI Core系列评估套件,可帮助设计者使用AI和DSP引擎开发解决方案。相较于服务器级CPU,这款评估套件的系统核心VC1902器件能够提供超过100倍的计算力。
VCK190评估套件是一个“多面手”,工程师朋友既可以借助其广泛的连接选项进行快速应用开发,包括数据中心计算、5G无线电与波束成形 (DFE)、无线测试设备等。同时,也可以应用于ADAS的原型开发。
针对ADAS的原型开发,AMD Xilinx提供专门的目标参考设计,帮助实现汽车应用的多传感器视频分析。在参考设计中,VCK190评估板上的图像传感器模块能够实时接收信息传递并加速和摄像头挂钩的图像传感器信息,同时该评估板还支持其他汽车应用中常见的AI/ML工作负载。
S32G2处理器帮助打造下一代网关
如上文所述,环境感知与精准定位、路径规划、线控执行并称自动驾驶四大核心技术。在具体实现时,“纯视觉”是多组ECU对应多组摄像头,提取有用信息之后汇总到计算芯片上做决策;“多传感器融合”则是不同的传感器对应不同的ECU模块单元,最终依然需要将提取之后的信息发送到计算芯片上进行运算。在车辆外部,车联网的概念让部分信息需要上传到云端,实现汽车作为边端的边云通信。那么,在此过程中,网关配置就显得尤为重要,用来帮助提高实时性处理和安全性。
接下来,我们要重点介绍的这款元器件便是可用于实现下一代汽车网关和架构的S32G2汽车网络处理器,来自制造商NXP Semiconductors,大家可以通过搜索制造商编号S32G274AABK0VUCT在贸泽电子网站上精准找到它。
S32G2处理器是制造商NXP Semiconductors在汽车网关设备系列中的升级产品,基于四核Arm® Cortex®-A53应用处理器打造,性能和网络加速能力是该公司此前产品的10倍以上。能够实现如此大的性能跨越,得益于该器件先进的设计理念。S32G2处理器带可选的两两锁步功能,用于处理高算力的应用和服务,其中3个Arm Cortex-M7全锁步内核,用于处理实时应用。以太网数据包转发引擎 (PFE)、低延迟通信引擎 (LLCE) 以及硬件安全引擎 (HSE) 三大硬件加速器的存在,让汽车网络传输更快、更安全。
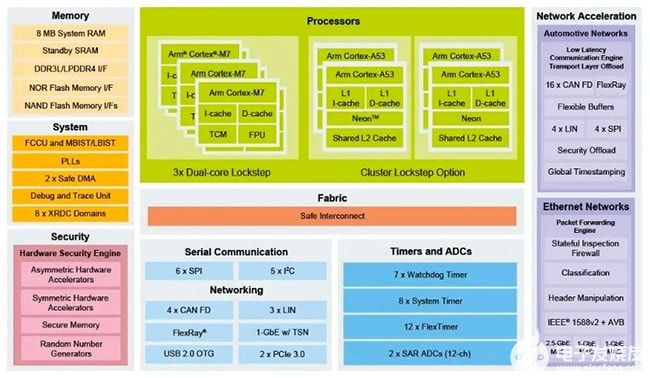
图6:S32G2汽车网络处理器系统框图(图源:NXP Semiconductors)
安全是S32G2处理器的一大产品特色,除了所提到的硬件加速器,还提供支持实现ASIL D功能安全的片上硬件模块和软件库。在可选的高级软件方案中,还提供可用于功能安全实现的S32安全软件框架和用于Cortex-A53内核的结构内核自测 (SCST),带来更高级的信息安全和功能安全体验。
总体而言,在域控制器、汽车网络和安全处理器等方面,多功能的S32G2处理器都是绝佳选择。
满足多种汽车应用的图像传感器
在技术路线的解读中我们看到,无论走怎样的发展路线,摄像头都是自动驾驶系统中必须要有的一部分,统称为视觉系统。接下来,我们为大家介绍的这款器件是可用于ADAS、自动驾驶、环视、倒车摄像头、车舱内监测等诸多汽车应用的图像传感器,来自制造商安森美 (onsemi),贸泽电子上的制造商编号为ASX340AT2C00XPED0-DPBR2。
ASX340AT系列图像传感器芯片是安森美图像传感器解决方案中的一个系列,主要面向汽车应用市场,适用于后视摄像头、盲点监控和环视等应用。
ASX340AT系列是VGA格式的单芯片CMOS有源像素数字图像传感器,具有优质图像传感器的内在优点,比如低噪声、低功耗和集成优势等,提供了多种摄像头功能,包括自动聚焦、自动白平衡和自动曝光。值得注意的是,ASX340AT系列是一款完整的片上摄像系统,在片上集成了复杂的摄像头功能,让集成商能够在无需额外处理芯片的情况下设计后视摄像头系统。
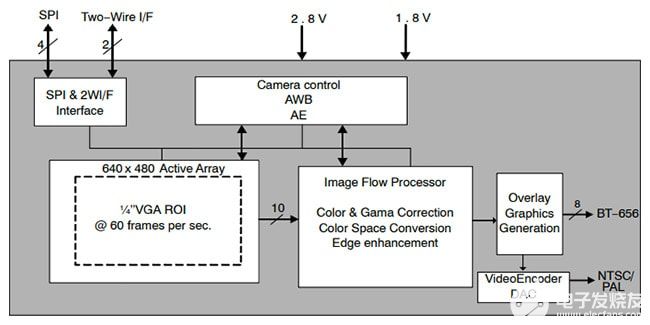
图7:ASX340AT系列内部框图(图源:安森美)
除了ASX340AT系列,整个安森美图像传感器解决方案是全面的图像检测产品组合,支持VGA至超过50MP的分辨率以及CMOS和CCD技术,可覆盖汽车、工业、消费领域的各种应用。目前,该组合中新款5个系列图像传感器都在贸泽电子分销,帮助工程师朋友实现前沿应用创新。
路线之争持续,但目标只有一个
无疑,在未来很长的一段时间内,关于如何实现自动驾驶,依然会存在派系之争,无论是环境感知,还是整体方案的实现。不过,纯视觉方案在未来将逐渐丢失先发优势,且由于方案的局限性较为明显,预计会有越来越多的厂商拥抱“多传感器融合”方案,尤其是在更高阶的自动驾驶领域。当然,无论如何实现,最终目标只有一个——让汽车驾驶更安全。为实现这个目标,厂商需要用更好的硬件方案去适配更智能的软件算法,而这正是贸泽电子能够帮到广大工程师朋友的地方,通过海量的原厂授权器件,让大家高效、优质地实现自动驾驶或辅助驾驶的硬件部分。
作者 Doctor M
-
adas
+关注
关注
311文章
2361浏览量
212238 -
激光雷达
+关注
关注
983文章
4595浏览量
197406 -
自动驾驶
+关注
关注
795文章
15056浏览量
181991
发布评论请先 登录
浅析自动驾驶发展趋势,激光雷达是未来?
激光雷达是自动驾驶不可或缺的传感器
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观
自动驾驶路线之争:纯视觉方案vs激光雷达加视觉方案
北醒CEO李远博士:“激光雷达本质是挑战人类视觉极限”


激光雷达与纯视觉方案,哪个才是自动驾驶最优选?
自动驾驶中纯视觉替代不了激光雷达?

自动驾驶纯视觉方案到底有哪些弊端?





评论